 Dans un article précédent,
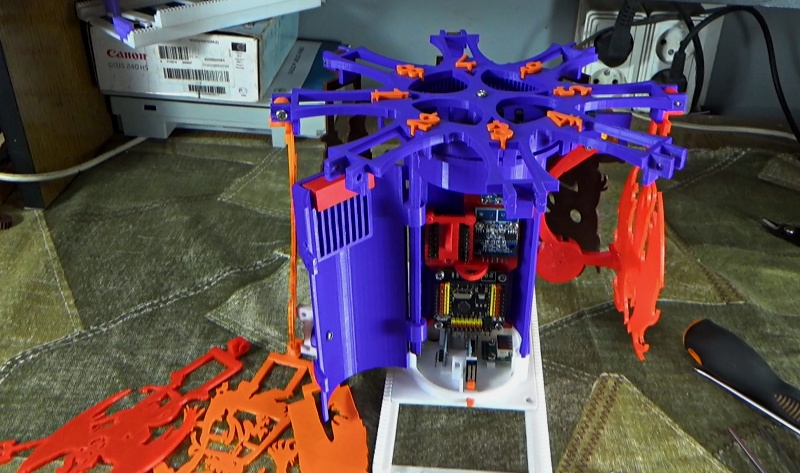
Dans un article précédent, j'ai parlé de mon nouveau développement - le jouet robotique à carrousel démoniaque. J'ai considérablement affiné ce modèle, et bien que l'appareil ne fonctionne toujours pas (je dois encore écrire un programme), j'ai encore quelque chose à montrer et à vous dire. La conception de la cible a considérablement changé et le principe du champ de tir est resté le même.
Toutes les parties du champ de tir ont été imprimées sur une imprimante 3D, pendant près de 50 heures, à une vitesse de 50 et une couche de 0,1 mm. L'impression pourrait être plus rapide, mais la qualité de l'appareil en souffrirait.
Sur la nouvelle version du jouet, j'ai dépensé environ 350 grammes de filament. Mais, bien sûr, il a fallu beaucoup plus pour développer un modèle de filament, en tenant compte de tous les essais et erreurs.
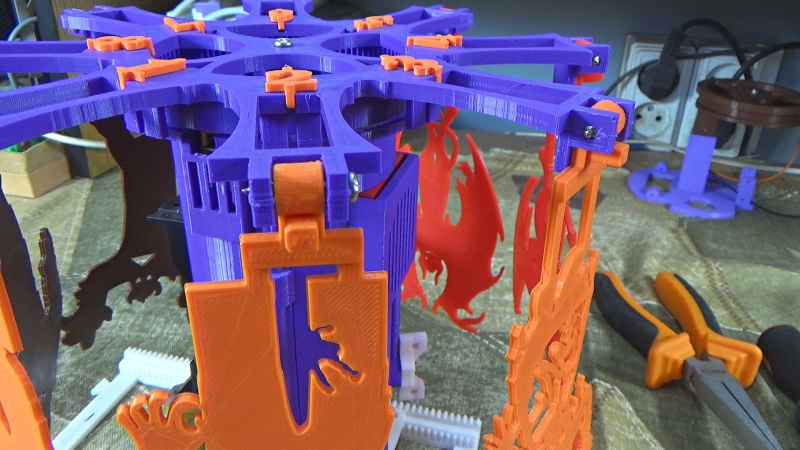
La nouvelle version du porte-cible est désormais plus élégante, de plus, il a fallu moins de filament que la version précédente de cet appareil. Grâce à cela également, j'ai pu réduire le nombre de vis de deux à une pour fixer chacune des huit cibles.

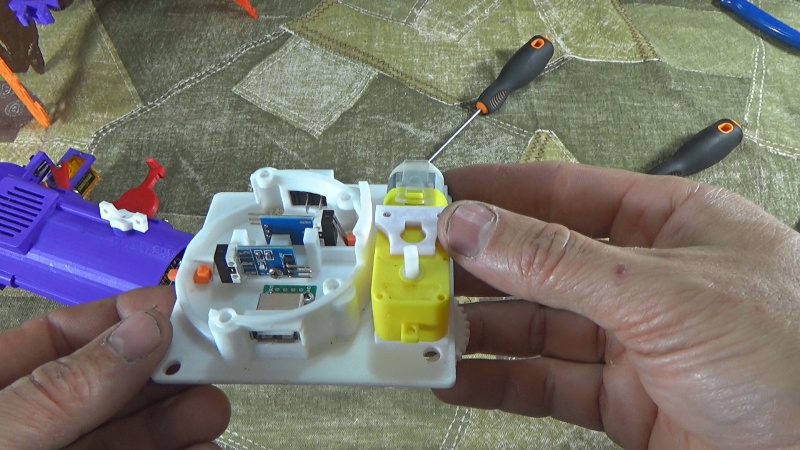
Pour un positionnement précis de la cible, un engrenage cylindrique avec engagement d'engrenage interne est implémenté. Ainsi, j'ai évité les inconvénients de la première option, où le porte-cible était monté directement sur l'arbre du moteur.

Deux optocoupleurs placent la cible dans la bonne position sous le dispositif de levage. L'utilisation d'optocoupleurs est une option bon marché, donc je n'ai pas utilisé de capteur de position magnétique dans ce modèle, qui coûte environ sept dollars. J'ai également fait une version d'essai, avec un capteur de position magnétique, mais il s'est avéré que cela n'augmente que le coût de la structure et n'apporte aucune amélioration particulière à l'appareil.
Pour que les optocoupleurs fonctionnent aux bons endroits, il y a deux secteurs à l'arrière du porte-cible. Un secteur, avec une position, vous permet de déterminer la position initiale de la cible. Sur le deuxième secteur, huit positions déterminent s'il y a une cible sous le dispositif de levage.
Le mécanisme du dispositif de levage avec l'emplacement du capteur de choc est resté presque le même, ici la conception n'a pas subi de modifications particulières.

Comme il n'y a pas de corps sur la banque d'alimentation, la carte de banque d'alimentation est située à l'extrémité du support cylindrique, qui sert de support à toute la structure cible. L'inconvénient de la conception est que vous devez dessouder le connecteur USB et le commutateur qui se trouvent sur la carte de la banque, sinon la banque n'entrera pas à sa place.


Je n'ai pas restreint l'accès à la batterie au lithium et je l'ai recouvert avec le boîtier, bien que cela puisse être encore amélioré: il y a des trous carrés spéciaux dans le boîtier pour cela. Les vis sont vissées à travers ces trous pour fixer la banque d'alimentation au boîtier. Ces ouvertures peuvent être un élément de fixation du boîtier qui cache la batterie au lithium.
Il y a deux autres trous dans le boîtier. L'un d'eux vous permet de connecter le chargement USB à une banque d'alimentation, et le second sert à surveiller visuellement l'état des LED.
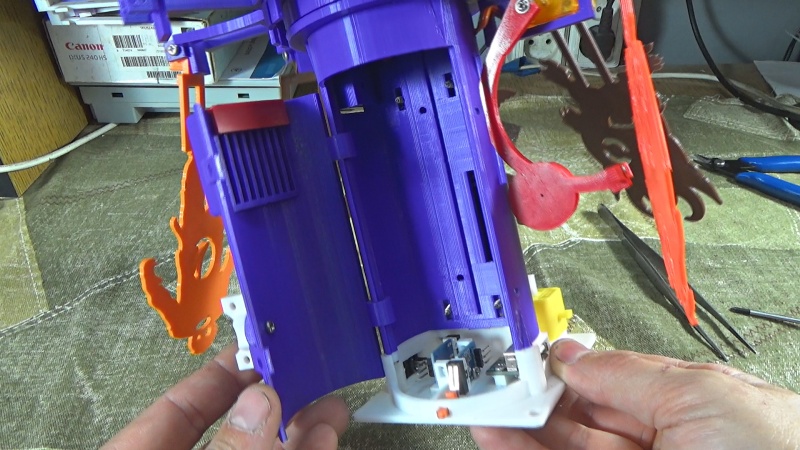
Le support cylindrique est creux, de sorte que toute l'électronique utilisée peut être placée à l'intérieur. Une porte spéciale est prévue pour l'accès.
Les cartes des modules utilisés, y compris le microcontrôleur, sont fixées à la lunette à l'aide des vis courtes M3. Naturellement, le faux panneau est en plastique et il est également fixé au corps avec deux vis.
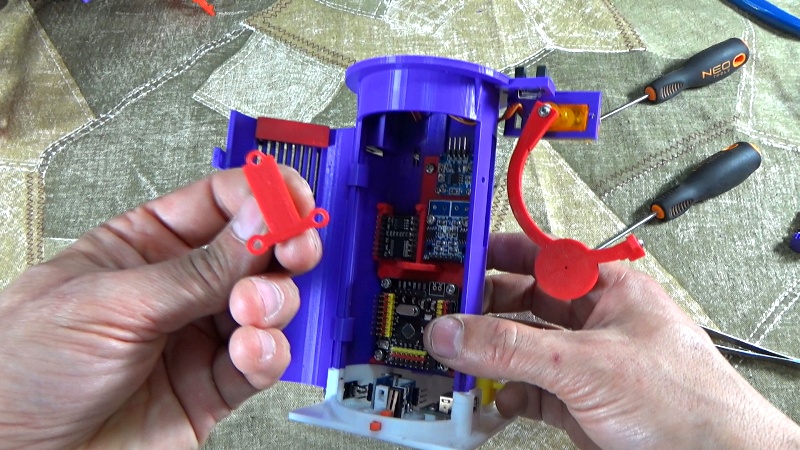
Une exception a été le module de son, qui n'est pas conçu pour un montage à vis. Par conséquent, le module de son est fixé dans une niche spéciale. Soit dit en passant, un haut-parleur est nécessaire pour son utilisation, et il s'intègre parfaitement dans la conception de la porte.

J'ai amélioré et la plateforme mobile. Les interrupteurs de fin de course pour restreindre le mouvement des cibles sur les rails sont désormais cachés à l'intérieur du boîtier. Le transfert vers les fins de course depuis les butées situées sur les rails s'effectue via des poussoirs. Ces poussoirs sont deux bandes en plastique situées dans les niches creuses de l'enveloppe du site.
La conception des poussoirs a conçu un accent particulier, qui ne permet pas aux pousseurs de tomber de leurs niches.
À l'avenir, je prévois de combiner d'autres appareils qui n'ont pas encore été développés via un connecteur USB. Jusqu'à ce que je commence à préciser de quel type d'appareils il s'agit, je peux seulement dire que ce seront des projets très intéressants.