
En août 1913, Peter Nesterov a effectué l'une des manœuvres les plus excitantes, dangereuses et complexes de l'aviation - la boucle morte. A cette époque, surtout compte tenu de la technologie d'alors, et maintenant c'est une véritable voltige. De nombreux professionnels et amateurs modernes du domaine de l'aviation donneraient tout pour parler avec Nesterov. Malheureusement, ce n'est pas possible, mais d'autres as de voltige vivent souvent avec nous et nous dérangent souvent. En règle générale, nous ne les remarquons pas, ou nous conduisons dans l'appartement avec une pantoufle ou un journal, car pour nous, ce sont des parasites, des porteurs de toute infection et des dépliants ennuyeux. Mais pour les scientifiques, ces créatures sont les gardiennes des secrets du vol et de l'atterrissage. Aujourd'hui, nous vous rencontrerons une étude étonnante de la capacité des mouches ordinaires à se poser à l'envers sur n'importe quelle surface. Quel mécanisme d'atterrissage les mouches utilisent-elles, de quels processus s'agit-il et à quel point est-il difficile de le mettre en œuvre artificiellement en robotique? Nous en apprenons à travers le rapport du groupe de recherche. Allons-y.
Base d'étude
Bien sûr, vous ne pouvez pas donner tous les lauriers de la supériorité en vol aux mouches, car de nombreux autres insectes ont également leurs capacités uniques dans le domaine du vol et de l'atterrissage. Cependant, les mouches, pour ainsi dire, ont accumulé en elles-mêmes le nombre maximum de ces compétences qui sont directement liées à leur anatomie.
 Apparition d'une mouche de l'espèce Calliphora vomitoria.
Apparition d'une mouche de l'espèce Calliphora vomitoria.Dans cette étude, le rôle principal a été joué par les mouches de l'espèce
Calliphora vomitoria (mouche bleue). Cette espèce peut être trouvée dans presque tous les coins de la planète: de l'Amérique du Sud à l'Asie de l'Est. Les dimensions de ces mouches sont assez impressionnantes, de 10 à 14 mm de long, ce qui est environ deux fois plus grand que celui des mouches
domestiques ordinaires (
Musca domestica ). Extérieurement,
Calliphora vomitoria peut être distinguée de ses parents par l'abdomen bleu, grâce auquel elle est également appelée «
mouche bluebottle », faisant allusion à une ressemblance avec la couleur du verre bleu de la bouteille.
En plus des différences externes avec les mouches domestiques,
Calliphora vomitoria a également des mouches comportementales. Les mouches bleues préfèrent voler dans un petit essaim plutôt que séparément, ce qui leur permet de trouver rapidement de la nourriture (généralement c'est du nectar de fleurs à forte odeur). Quand un individu de l'essaim trouve de la nourriture, il secrète une phéromone spéciale, signalant la découverte à tout le monde.
Les gens utilisent souvent des larves de mouches bleues comme appâts pendant la pêche, mais pour les insectes, ce n'est pas l'application la plus unique et, en vérité, pas la plus digne. Non seulement les pêcheurs trouvent la faveur des mouches bleues, mais aussi de la médecine légale. Les mouches, comme nous le savons, ne sont pas délicates, car les cadavres d'animaux et de personnes ne les effraient pas, mais les attirent. Pour les experts en médecine légale, il s'agit d'un critère supplémentaire pour estimer l'heure de la mort, car les mouches bleues ont une relation très claire entre le taux de croissance de leurs larves et la température ambiante. Connaissant la température, il est possible de déterminer à partir des larves le moment où les œufs ont été pondus.
Mais aujourd'hui, nous ne parlerons pas de criminalistique, mais d'aviation. Étude d'ajustement inversé, c.-à-d. L'atterrissage au plafond, comme l'appellent les scientifiques, a été effectué plus tôt, mais pas avec autant de détails. Cependant, certaines nuances intéressantes ont été découvertes. Lors des observations de l'atterrissage inversé des mouches domestiques, les scientifiques ont remarqué qu'ils effectuent des mouvements de rotation "semi-circulaires" avant le contact des pattes
homolatérales * avec la surface.
Ipsilatéral * - situé du même côté (exagéré, le bras gauche d'une personne est ipsilatéral par rapport à la jambe gauche).
À la suite de ce mouvement, l'oscillation latérale du corps à l'aide des jambes s'est produite, ce qui a conduit au contact des jambes restantes avec la surface. Ces manoeuvres et d'autres avant l'atterrissage proprement dit sont bien sûr dues au capteur, c'est-à-dire signaux visuels, tactiles et autres reçus par la mouche avant l'atterrissage.
Dans notre étude d'aujourd'hui, des scientifiques de l'Université de Pennsylvanie ont effectué une série d'observations sur l'atterrissage de mouches bleues sur une surface inversée dans une chambre de vol (dans une soufflerie) en utilisant la vidéo à haute vitesse (
1A ).
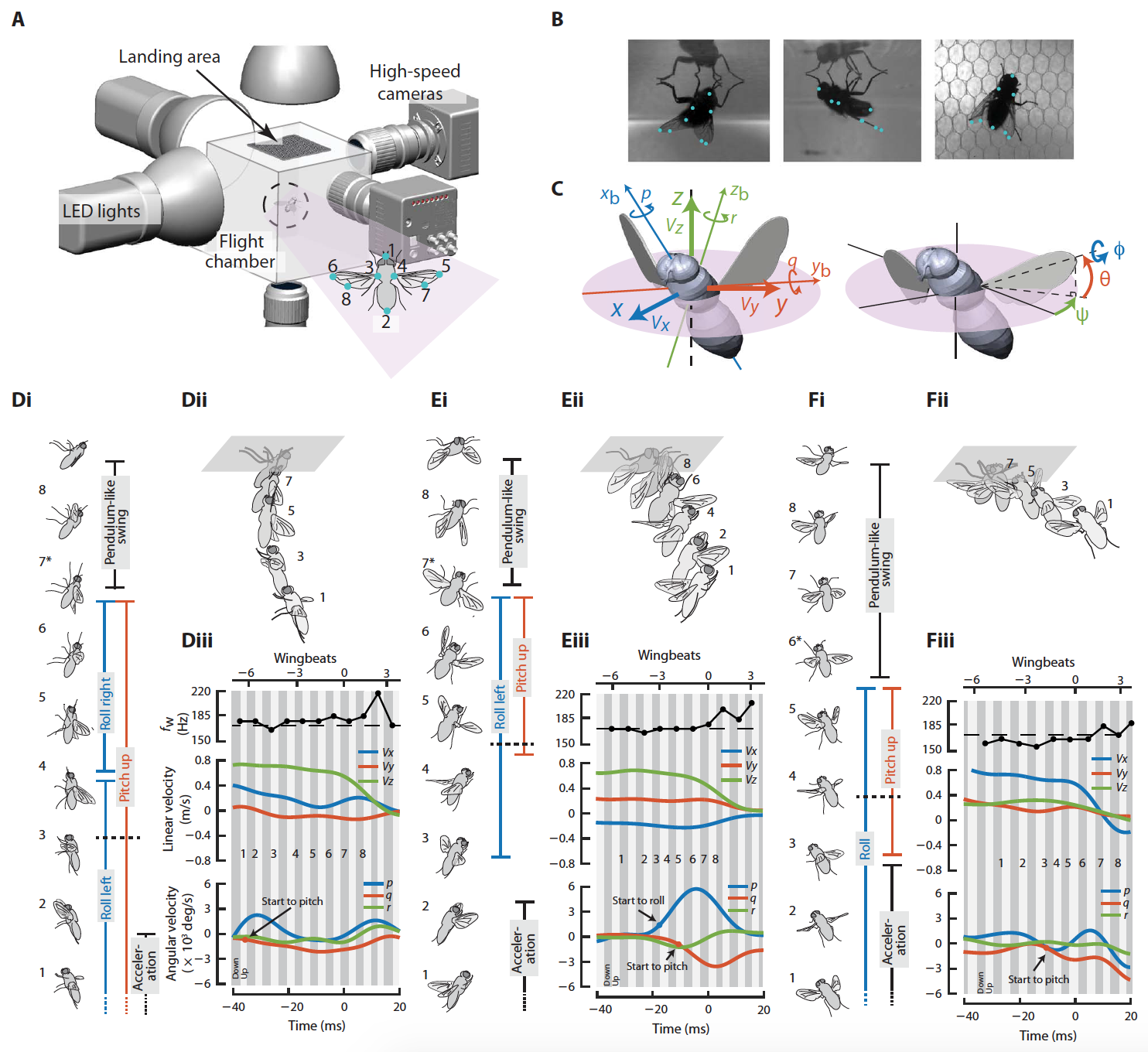 Image n ° 1
Image n ° 1La cinématique du corps et des ailes des mouches a été obtenue en numérisant les étiquettes anatomiques (
1B et
1C ).
Résultats d'observation
Tout d'abord, les scientifiques ont décidé d'isoler et d'analyser les aspects comportementaux d'un atterrissage réussi.
Ils notent que les mouches des fruits atterrissent sur des surfaces verticales par une décélération continue et une légère rotation du corps avant la plantation. Mais les mouches bleues lors de l'atterrissage ont montré immédiatement 4 aspects comportementaux consécutifs: accélération verticale, manœuvre de rotation de tout le corps, extension des jambes et balancement de tout le corps avec les pattes avant fixées de manière stable à la surface. La durée de l'ensemble du processus d'atterrissage réussi a été d'environ 4 à 8 impacts d'aile selon 18 observations, tandis que la fréquence moyenne d'impact des ailes était de 172,7 ± 7,7 Hz.
Lors des atterrissages réussis, les scientifiques ont également observé des changements cinématiques importants dans les axes de rotation, les valeurs des manœuvres de rotation et le degré de basculement du corps dû aux pattes.
Après avoir rassemblé toutes les observations, les scientifiques ont identifié les principales stratégies lors de l'atterrissage, qui ont été classées comme suit: dominante en
tangage * , dominante en
roulis * , combinée et dominante en balancement latéral / longitudinal.
Pitch * - le mouvement angulaire du corps par rapport à l'axe transversal horizontal.
Roll * - la rotation du corps autour de son axe longitudinal.
Vidéo # 1: atterrissage avec un pitch dominant (correspond à l'image 1D).Vidéo n ° 2: atterrissage avec un roulement dominant (correspond à l'image 1E).Les images
1D -
1F montrent des modèles typiques de comportement d'une mouche bleue lors de l'atterrissage. Dans les deux premiers exemples, les mouches ont utilisé des manœuvres de rotation rapides, principalement par rapport à l'axe de tangage (
1D et vidéo n ° 1) ou de roulis (
1E et vidéo n ° 2), qui ont placé leur corps avant d'atterrir dans une orientation presque inversée (ventre vers le haut).
L'alignement des pattes s'est produit presque immédiatement après le début des manœuvres de rotation (lignes pointillées noires horizontales sur
1Di et
1Ei ). Après que les pattes aient touché la surface, la phase de balancement du corps a commencé.
Il est curieux que la vitesse angulaire moyenne des manœuvres de rotation atteigne environ 4000 ° / s, et que sa valeur maximale puisse dépasser 6000 ° / s, ce qui est nettement supérieur à celui des mouches des fruits ou même des colibris.
Vidéo # 3: atterrissage avec la vibration longitudinale dominante du corps (correspond à l'image 1F).Dans la troisième version, les mouches reposaient presque entièrement sur le balancement du corps avec leurs pattes (
1F et vidéo n ° 3), et la manœuvre de rotation était insignifiante.
Vidéo n ° 4: atterrissage avec le balancement latéral du corps dominant.Ainsi, par rapport aux deux premières options, cette stratégie d'atterrissage utilisait probablement plus de processus mécaniques et structurels (par exemple,
adhésion * due aux
pulvillas * ou
amortissement * due à la viscoélasticité des pattes), ce qui a facilité la transmission de la quantité de mouvement linéaire du corps à la vitesse de rotation .
Adhésion * - adhérence de surfaces d'origine différente (par exemple, gouttes de rosée sur l'herbe).
Pulvilla * - coussinets mous de la pointe des jambes, chacun étant situé sous sa griffe. La tâche principale des pulvillas est de maintenir l'insecte sur une surface verticale lisse ou inclinée.
Amortissement * - suppression artificielle des vibrations.
L'étape suivante de l'étude a été d'étudier les différences cinématiques entre les atterrissages réussis et ceux qui ont échoué.
Vidéo n ° 5: atterrissage avec mécanique de roulis combinée.Les atterrissages infructueux comprenaient ceux qui se sont terminés par une collision avec la surface (qui est pour les scientifiques les données à analyser, puis pour les mouches une commotion cérébrale, au sens figuré, bien sûr).
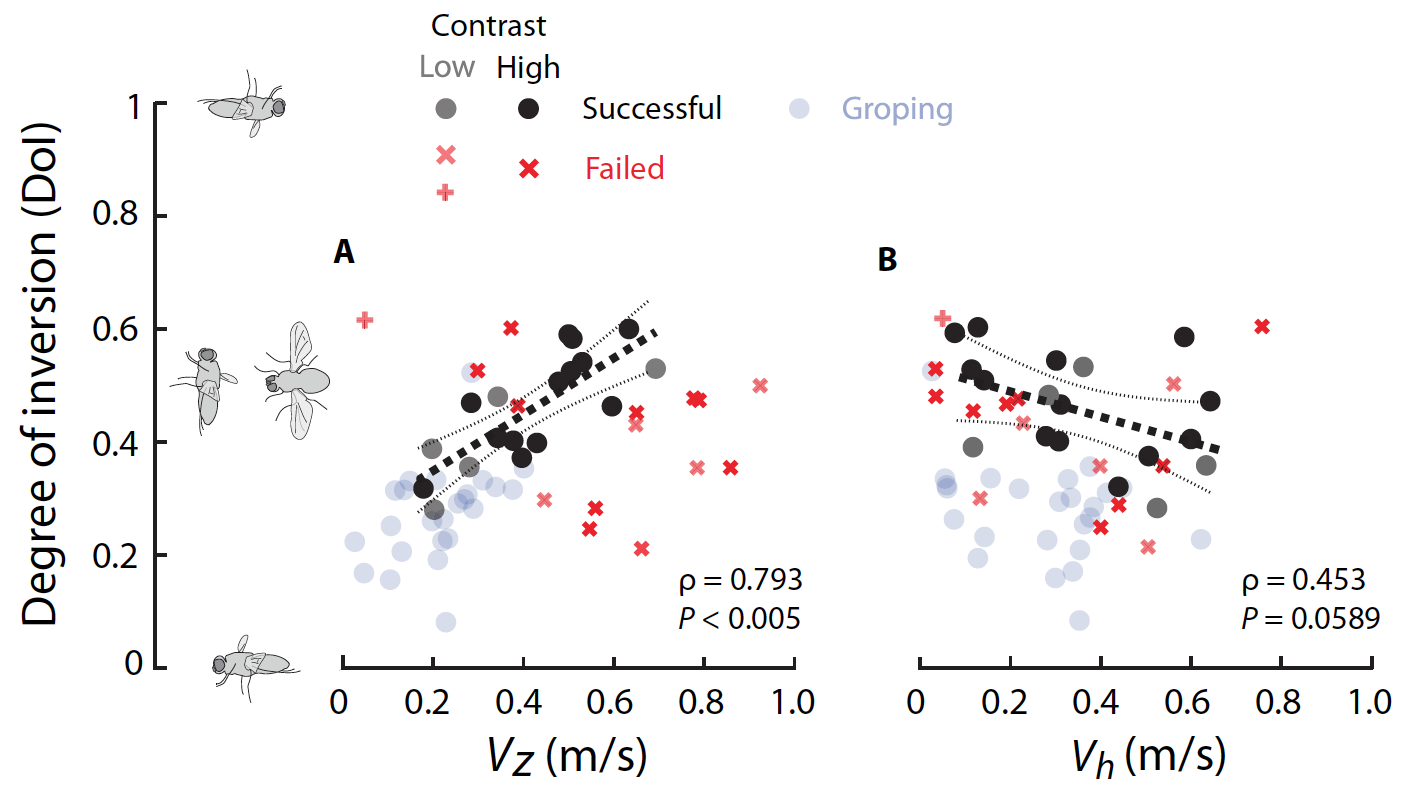 Image n ° 2
Image n ° 2Pour quantifier dans quelle mesure le corps de la mouche était orienté, un degré d'inversion (DoI à partir du
degré d'inversion ) a été calculé, qui mesure le degré d'alignement du corps de la mouche avec son orientation complètement inversée avant l'atterrissage. DoI varie de 0, ce qui signifie l'absence d'inversion du corps, c'est-à-dire l'abdomen jusqu'à 1, ce qui signifie une inversion de tout le corps, c'est-à-dire ventre en l'air. Lors des atterrissages réussis, DoI a augmenté à une vitesse verticale (
2A ), mais a diminué à une vitesse longitudinale (
2B ).
Cette observation a indiqué que les mouches devaient rouler davantage lorsque leur vitesse ascendante était plus élevée ou lorsque leur vitesse horizontale était plus basse. Dans la majorité des atterrissages infructueux (il y en avait 15 au total), les mouches n'ont pas été retournées avant le moment du débarquement par rapport à la position des mouches qui ont réussi à atterrir.
La cause de l'échec pourrait être une rotation intempestive ou insuffisante du corps avant l'atterrissage. Ainsi, ces mouches ne pouvaient pas atterrir correctement sur le plafond, mais s'y sont écrasées.
Vidéo n ° 7: échec de l'atterrissage en raison d'une manœuvre de rotation trop tôt.De plus, des atterrissages infructueux se sont également produits en raison d'une rotation trop précoce du corps (vidéo n ° 7), car une inversion antérieure a entraîné une vitesse verticale insuffisante nécessaire pour atteindre le plafond (marquée d'un «+» sur les graphiques
2A et
2B ).
Vidéo n ° 8: atterrissage infructueux en raison d'une faible inversion du corps avec un alignement intempestif des jambes.Une autre raison des échecs, malgré l'inversion et la vitesse de mouvement correctes, était l'alignement tardif des pattes, ce qui a conduit à un emplacement incorrect et, par conséquent, à un contact insuffisamment tenace avec la surface (vidéo n ° 8).
Vidéo n ° 6: un exemple d'atterrissage par contact au plafond.Malgré toutes les crevaisons et les lacunes, certaines mouches pourraient encore récupérer et atterrir avec succès en utilisant un atterrissage par contact. Dans ce cas, les mouches volent à basse vitesse verticale sous le plafond, puis elles sentent la surface à l'aide des pattes avant, puis elles s'accrochent et atterrissent (vidéo n ° 6).
Vidéo n ° 9: échec de l'atterrissage en raison d'une faible inversion du corps avec une légère rotation du corps.En résumant les données obtenues à partir des observations, les scientifiques sont arrivés à la conclusion que les aspects cinématiques de l'atterrissage de la mouche contiennent des processus neuronaux beaucoup plus différents qu'on ne le pensait auparavant. La caractéristique la plus frappante reste la manœuvre de rotation. Il ne reste plus qu'à comprendre ce qui la provoque, ou plutôt quels signaux conduisent au fait que la mouche l'utilise pour l'atterrissage.
Les premiers à venir à l'esprit, bien sûr, sont les signaux visuels que les mouches reçoivent à l'approche du plafond avec une vitesse linéaire composée de trois composantes (
1C ): verticale (
V z ), longitudinale (
V x ) et latérale (
V y ).
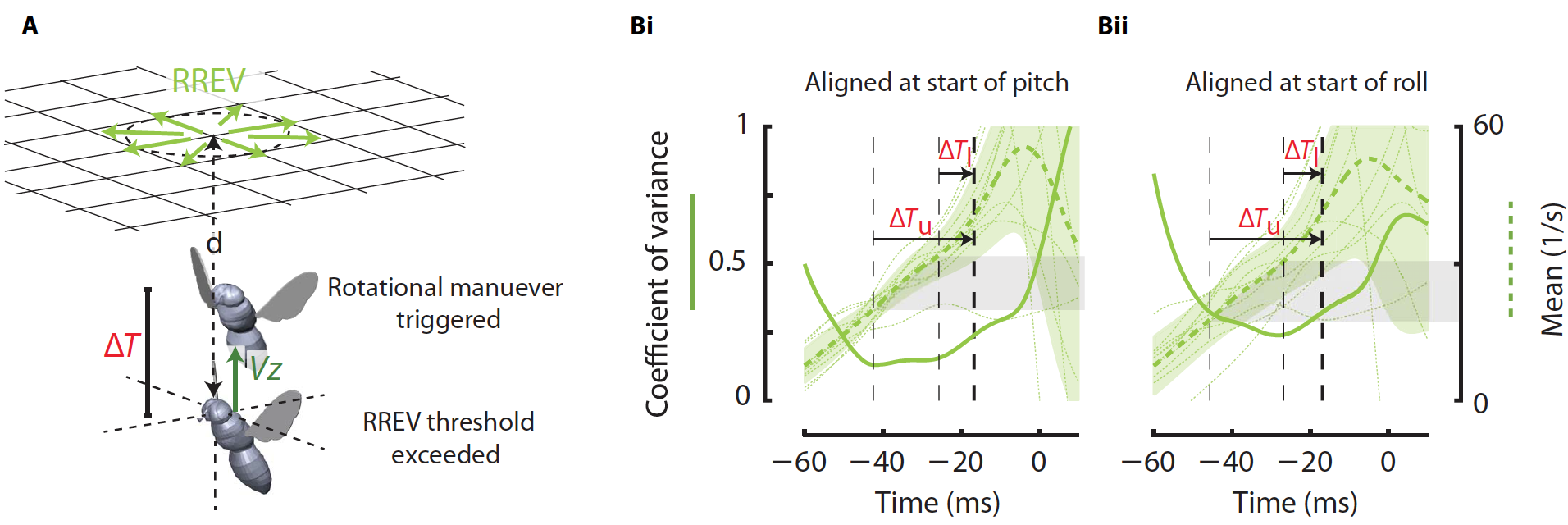 Image n ° 3
Image n ° 3Grâce au travail de leurs prédécesseurs, les chercheurs connaissent avec précision les trois principaux types d'indices visuels nécessaires pour évaluer le mouvement des mouches.
Tout d'abord, le taux d'expansion relative de la rétine (
RREV ) dû aux stimuli immobiles (
3A ). Cet indicateur peut être calculé comme le rapport du taux d'augmentation de la cible à sa taille réelle sur la rétine de la mouche pendant le mouvement ascendant (
V z ). RREV correspond également à l'inverse du temps de collision (
t ). Le RREV est considéré comme un signal de perception important, qui contrôle la vitesse d'approche lors de l'atterrissage ou de la marche autour des obstacles.
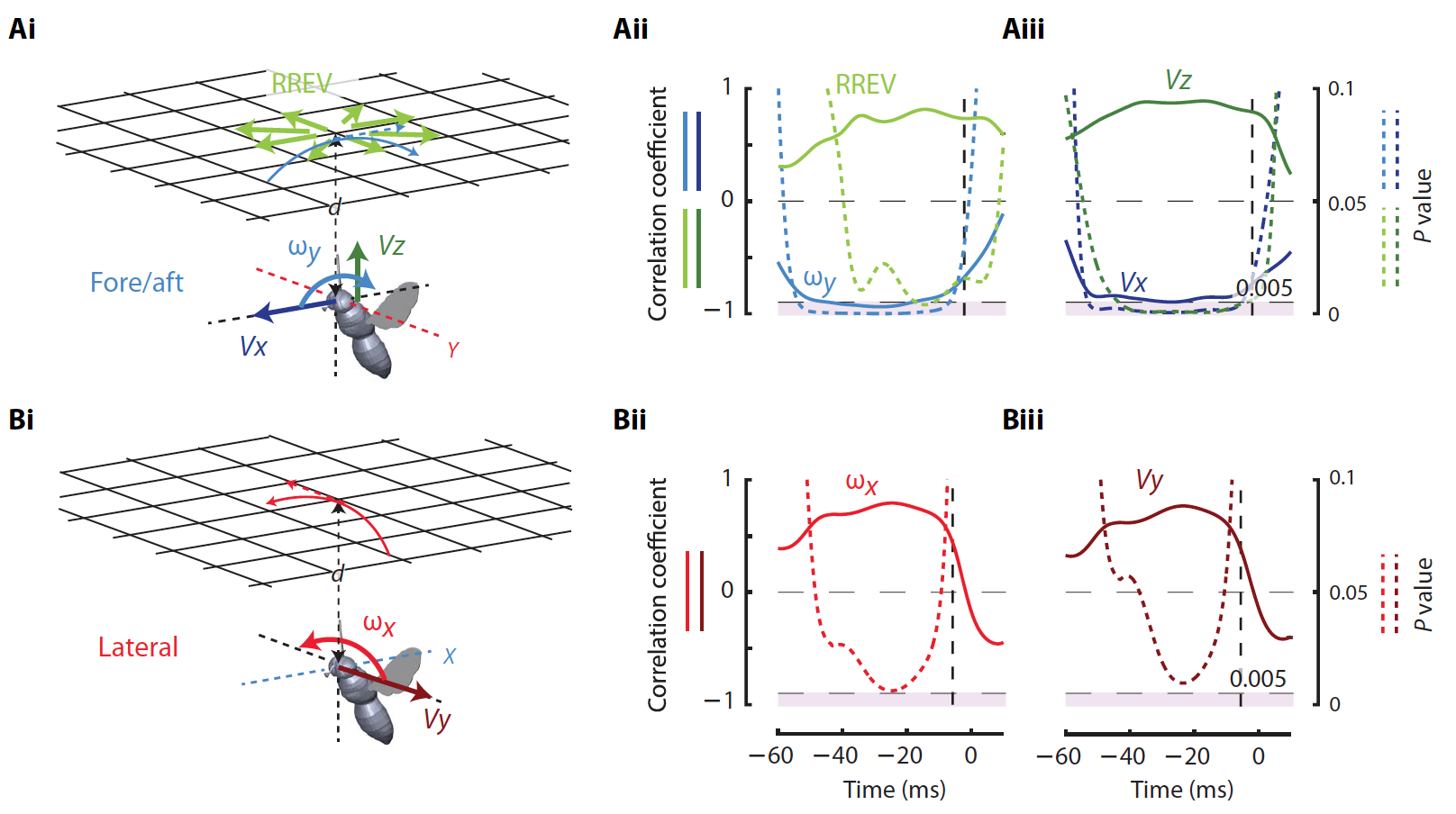 Image n ° 4
Image n ° 4Deuxièmement, la vitesse angulaire relative de la direction longitudinale (
4Ai ) du plafond sur la rétine de la mouche (ω
y ). Ces indices visuels sont le résultat du déplacement du corps vers l'avant / vers l'arrière (
V x ), c'est-à-dire dans le sens horizontal. Il a été précédemment constaté que ce sont ces signaux qui régulent l'atterrissage sur les surfaces horizontales.
Troisièmement, la vitesse angulaire transversale relative du plafond (ω
x ) sur la rétine de la mouche (
4Bi ) obtenue à la suite d'un mouvement latéral (
V y ).
Les chercheurs suggèrent que la manœuvre de rotation commence après un délai fixe lorsque le signal visuel provocateur (signal, qui mène à l'action réelle) atteint une valeur seuil. Cette hypothèse nous permet d'évaluer la relation des signaux ci-dessus et les manœuvres de mouvement effectuées par la mouche lors de l'atterrissage.
La première étape a été de calculer les courbes temporelles du coefficient de variation (CV) de chacun des signaux visuels. Les observations ont été prises comme base, au cours de laquelle les mouches ont atterri avec succès sur le plafond lors de la première tentative.
Si les manœuvres de rotation ont été lancées après un certain retard, lorsque le signal visuel a atteint une valeur seuil, le CV de ce signal visuel doit être minimal. De plus, il doit être inférieur à celui des autres signaux visuels non provocateurs, c'est-à-dire le signal visuel provocateur devrait avoir la plus petite dispersion. Les observations et les calculs ont montré que parmi les trois signaux testés, c'était le RREV qui avait la valeur CV la plus faible au moment de tourner le virage (15%) et le roulis (25%), tandis que les deux autres signaux visuels avaient un CV significativement plus élevé (
3B ).
Cela signifie que RREV est le principal signal visuel qui déclenche le début d'une manœuvre de rotation lors d'un atterrissage inversé.
La valeur CV pour RREV était minimale entre 7 ms (∆T
l ) et 27 ms (∆T
u ) avant le début de la manœuvre de rotation. Par conséquent, le retard visuel DT entre le moment de la perception et le début de la manœuvre était dans cette petite plage. Il a également été constaté que le temps critique avant une collision, au-dessous duquel une manœuvre de rotation est lancée (pour éviter une collision et atterrir avec succès), est de 31 à 53 ms. A titre de comparaison, pour les mouches atterrissant sur des surfaces verticales, ce chiffre est de 76 ms. En d'autres termes, lors de l'atterrissage au plafond, les mouches ont beaucoup moins de temps pour l'erreur.
Les manœuvres de rotation, à en juger par les observations, étaient assez variables en termes de vitesse de roulis et de tangage. Cette variabilité peut indiquer que la manœuvre de rotation est régulée non seulement par la composante temporelle, mais également par d'autres signaux sensoriels.
Les mouches utilisent des signaux sensoriels pour fournir une manœuvre de rotation via des canaux directs et de rétroaction. Le canal de communication directe émet des commandes de contrôle spontanées qui provoquent des changements transitoires importants dans le mouvement de l'aile. Ces changements affectent directement l'amplitude de la réaction primaire à la manœuvre.
Le canal de rétroaction fournit une réponse compensatoire qui provoque un petit changement dans le mouvement de l'aile. De tels changements affectent l'amortissement (suppression des vibrations) et la stabilisation de la manœuvre.
Le degré d'influence d'un signal de capteur particulier sur la manœuvre a été évalué en détectant la corrélation de la vitesse maximale de roulis et de rotation pendant la manœuvre de rotation avec les signaux sensoriels reçus par les mouches avant ou après le début des manœuvres.
Les signaux de capteur proposés comprennent trois visuels (RREV, ω
x et ω
y ), discutés précédemment, et trois composantes de la vitesse linéaire (
V x ,
V y et
V z ).
L'analyse de régression linéaire a montré que pendant une longue période avant le début des manœuvres, la vitesse de tangage maximale était positivement corrélée avec RREV (
4Aii ) et la vitesse verticale
V z (
4Aiii ), mais négativement avec la rotation longitudinale ω
y (
4Aii ) et la vitesse linéaire longitudinale
V x (
4Aiii ).
À leur tour, les vitesses maximales de roulis étaient positivement corrélées avec la rotation latérale ω
x (
4Bii ) et la vitesse linéaire latérale
V y (
4Biii ) pendant une longue période de temps avant et après le début de la manœuvre.
L'analyse a également indiqué que les mouches peuvent changer la force de la manœuvre de rotation afin d'utiliser plus efficacement les vibrations du corps au moment de l'atterrissage, c'est-à-dire la transmission d'une impulsion linéaire à une impulsion angulaire.
Comme les observations l'ont montré, la vitesse de tangage a diminué lorsque l'impulsion linéaire était élevée, comme l'indique la corrélation négative entre le niveau de tangage de crête et les signaux du capteur. Ainsi, au lieu du tangage, les mouches retournent leur corps, augmentant l'oscillation longitudinale du corps avec leurs pattes et transmettant une impulsion linéaire directe au moment angulaire du tangage.
Une augmentation de la vitesse de roulis a également été observée lorsque l'impulsion linéaire latérale était élevée, comme l'indique une corrélation positive entre la vitesse de roulis maximale et les signaux sensoriels. Une telle corrélation inverse peut se produire dans des situations où les mouches ont besoin d'une plus grande distance pour élever leurs pattes ipsilatérales suffisamment haut et atteindre le plafond pour davantage de balancement du corps.
N'oubliez pas l'attribut le plus important des vols pour les mouches, c'est-à-dire sur les ailes. Les chercheurs ont analysé la cinématique des ailes des mouches lors d'un atterrissage au plafond, car ce sont les ailes qui créent les différentes impulsions aérodynamiques nécessaires à la réussite des manœuvres.
Les observations des ailes des mouches bleues ont révélé un certain nombre de changements survenus au moment de la manœuvre.
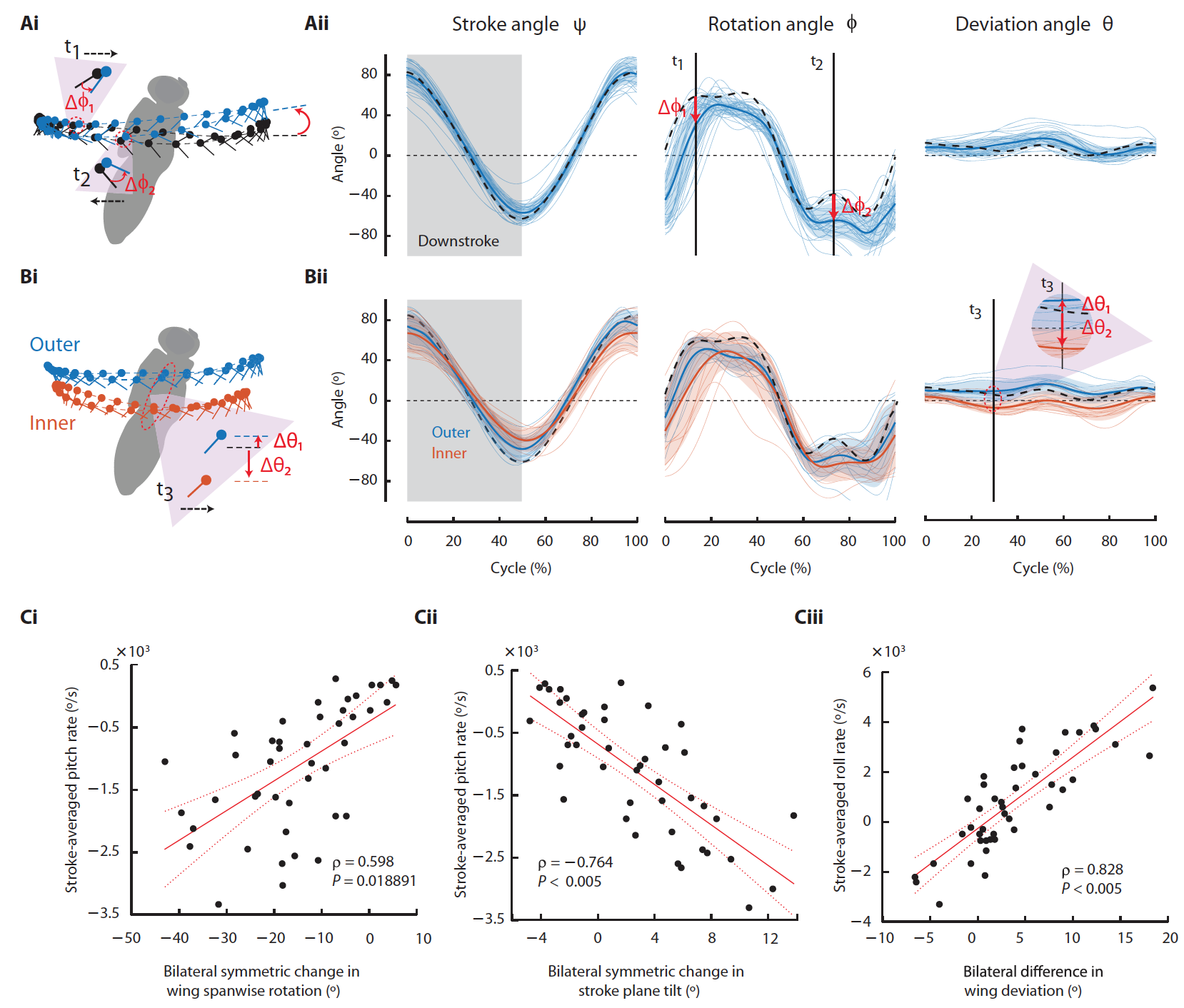 Image n ° 5
Image n ° 5La première chose qui a été découverte était un changement symétrique bilatéral dans la rotation longitudinale de l'aile (
5A et
5Ci ) et des changements symétriques bilatéraux dans l'angle du plan de l'aile (
5A et
5Cii ), qui étaient tous deux fortement corrélés avec la fréquence de tangage. Il y a également eu des changements d'inclinaison des ailes (
5B et
Ciii ), qui étaient fortement corrélés à la vitesse de roulis. De plus, il y a eu aussi des changements dans l'amplitude des volets et la rotation de l'aile centrale, ce qui contribue au roulis.
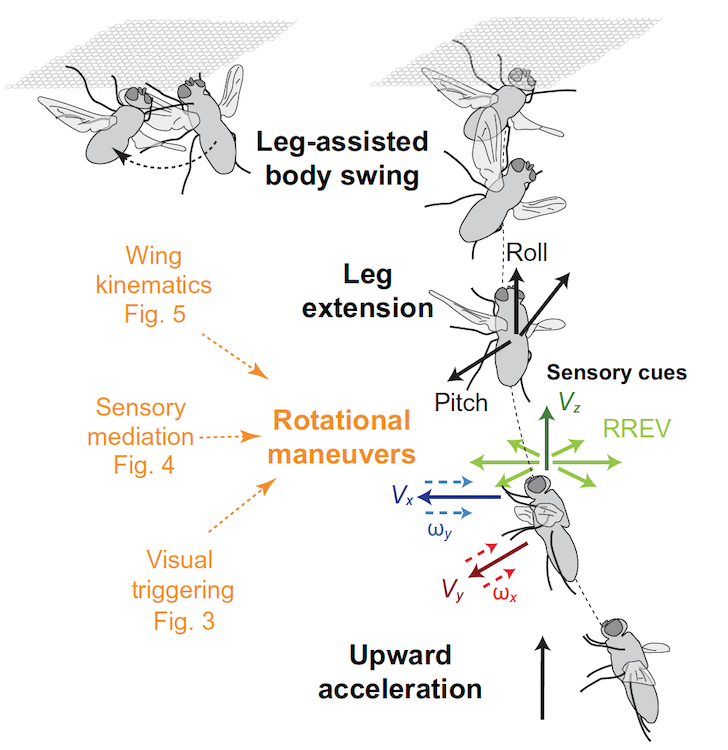 Image n ° 6
Image n ° 6Pour une connaissance plus détaillée des nuances de l'étude, je vous recommande de consulter le
rapport des scientifiques et
les documents supplémentaires qui s'y rapportent.
Épilogue
En résumant toutes les observations et les résultats des calculs, les chercheurs sont arrivés à la conclusion que l'atterrissage inversé au plafond est dû à une séquence bien coordonnée de modules comportementaux (schéma ci-dessus).L'atterrissage au plafond peut inclure des processus neuronaux qui calculent non seulement les informations de codage RREV sur le temps avant la collision, mais également d'autres signaux sensoriels qui sont censés coder le mouvement linéaire multiaxial du corps.Pour le moment, les scientifiques ne peuvent toujours pas répondre avec précision à la question de savoir quels signaux sensoriels conduisent à certains mouvements pendant la manœuvre. Mais les travaux menés sans équivoque constituent la base de futures recherches.Les observations d'insectes et d'oiseaux ont toujours servi d'inspiration à l'homme pour créer des avions. L'étude des mouches bleues ne fait pas exception. Les scientifiques pensent que leurs observations indiquent que pour la mise en œuvre réussie d'un véhicule robotisé ou habité capable d'atterrir sur des surfaces inversées, une intégration étroite des processus informatiques et mécaniques est nécessaire. Par exemple, il peut s'agir d'une combinaison de schémas de reconnaissance rapide des images et d'un système de contrôle de la position de l'appareil plus un système de stabilisation qui vole réalisé en faisant vibrer le corps sur ses jambes.Une fois qu'un homme ne pouvait que rêver de voler, c'est maintenant une réalité. Mais nous ne sommes que des invités dans cet environnement qui nous est étranger, qui est originaire de nombreux organismes vivants, et nous avons encore beaucoup à comprendre, à découvrir et à explorer, avant de devenir leurs véritables voisins dans les nuages.Merci de votre attention, restez curieux et bonne semaine de travail, les gars! :)
Merci de rester avec nous. Aimez-vous nos articles? Vous voulez voir des matériaux plus intéressants? Soutenez-nous en passant une commande ou en le recommandant à vos amis, une
réduction de 30% pour les utilisateurs Habr sur un serveur d'entrée de gamme analogique unique que nous avons inventé pour vous: Toute la vérité sur VPS (KVM) E5-2650 v4 (6 cœurs) 10 Go DDR4 240 Go SSD 1 Gbps à partir de 20 $ ou comment diviser le serveur? (les options sont disponibles avec RAID1 et RAID10, jusqu'à 24 cœurs et jusqu'à 40 Go de DDR4).Dell R730xd 2 fois moins cher?Nous avons seulement 2 x Intel TetraDeca-Core Xeon 2x E5-2697v3 2.6GHz 14C 64GB DDR4 4x960GB SSD 1Gbps 100 TV à partir de 199 $ aux Pays-Bas! Dell R420 - 2x E5-2430 2.2Ghz 6C 128GB DDR3 2x960GB SSD 1Gbps 100TB - à partir de 99 $! Pour en savoir plus sur la création d'un bâtiment d'infrastructure. classe utilisant des serveurs Dell R730xd E5-2650 v4 coûtant 9 000 euros pour un sou?