
Dans une publication précédente, nous avons parlé du fonctionnement des bus et des protocoles dans l'automatisation industrielle. Cette fois, nous nous concentrons sur des solutions de travail modernes: voyons quels protocoles sont utilisés dans les systèmes du monde entier. Prenons la technologie des entreprises allemandes Beckhoff et Siemens, de l'Autrichien B&R, de l'American Rockwell Automation et du Russian Fastwel. Et nous étudierons également des solutions universelles qui ne sont pas liées à un fabricant spécifique, comme EtherCAT et CAN.
À la fin de l'article, il y aura un tableau comparatif avec les caractéristiques des protocoles EtherCAT, POWERLINK, PROFINET, EtherNet / IP et ModbusTCP.
Nous n'avons pas inclus les protocoles PRP, HSR, OPC UA et autres, comme sur eux sur Habré il y a déjà d'excellents articles de nos collègues ingénieurs qui sont engagés dans le développement de systèmes d'automatisation industrielle. Par exemple, "Protocoles" transparente "redondance PRP et HSR" et "Passerelles de protocoles d'échange industriels pour Linux. Construisez-le vous-même . "
Pour commencer, nous définissons la terminologie: Industrial Ethernet = réseau industriel, Fieldbus = bus de terrain. La confusion règne dans l'automatisation industrielle russe en termes de bus de terrain et de réseau industriel de bas niveau. Souvent, ces termes sont combinés en un seul concept vague de "niveau inférieur", qui est appelé à la fois bus de terrain et bus de niveau inférieur, bien qu'il ne s'agisse pas du tout d'un bus.
PourquoiCette confusion est très probablement due au fait que dans de nombreux automates modernes, la connexion des modules d'E / S est souvent mise en œuvre à l'aide du fond de panier ou du bus physique. C'est-à-dire que certains contacts et connecteurs de bus sont utilisés pour combiner plusieurs modules en une seule unité. Mais ces nœuds, à leur tour, peuvent être interconnectés à la fois par un réseau industriel et un bus de terrain. Il existe une séparation claire dans la terminologie occidentale: un réseau est un réseau, un bus est un bus. Le premier est désigné par le terme Industrial Ethernet, le second par Fieldbus. L'article propose d'utiliser le terme «réseau industriel» et le terme «bus de terrain», respectivement, pour ces concepts.
EtherCAT Industrial Network Standard, développé par Beckhoff
Le protocole EtherCAT et le réseau industriel sont peut-être aujourd'hui l'une des méthodes de transfert de données les plus rapides dans les systèmes d'automatisation. Le réseau EtherCAT a été utilisé avec succès dans des systèmes d'automatisation distribués, où les nœuds en interaction sont espacés sur une longue distance.
Le protocole EtherCAT utilise des trames Ethernet standard pour transmettre ses télégrammes, donc la compatibilité avec tout équipement Ethernet standard est maintenue et, en fait, la réception et la transmission des données peuvent être organisées sur n'importe quel contrôleur Ethernet, si le logiciel correspondant est disponible.
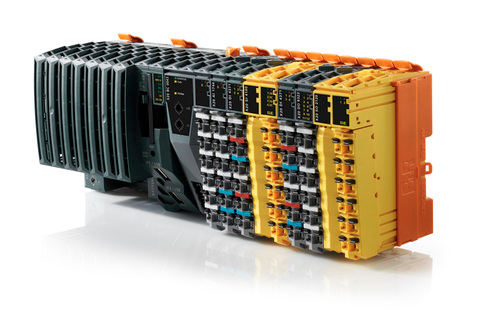
 Contrôleur Beckhoff avec un ensemble de modules d'E / S. Source: www.beckhoff.de
Contrôleur Beckhoff avec un ensemble de modules d'E / S. Source: www.beckhoff.deLa spécification du protocole est ouverte et accessible, mais uniquement dans le cadre de l'association de développement - EtherCAT Technology Group.
Voici comment fonctionne EtherCAT (la vue est fascinante, comme le jeu Zuma Inca):
Le taux de change élevé dans ce protocole - et nous pouvons parler d'unités de microsecondes - est dû au fait que les développeurs ont refusé d'échanger en utilisant des télégrammes envoyés directement à un appareil spécifique. Au lieu de cela, un télégramme est envoyé au réseau EtherCAT, adressé à tous les appareils en même temps, chacun des nœuds subordonnés pour la collecte et la transmission d'informations (ils sont également souvent appelés USO - un appareil de communication avec un objet) récupère à la volée les données qui lui étaient destinées et les insère dans un télégramme les données qu'il est prêt à fournir pour l'échange. Après cela, le télégramme est envoyé au nœud subordonné suivant, où la même opération a lieu. Après avoir passé tous les ODR, le télégramme est renvoyé au contrôleur principal qui, sur la base des données reçues des dispositifs esclaves, met en œuvre la logique de contrôle, interagissant à nouveau au moyen d'un télégramme avec les nœuds esclaves qui émettent un signal de contrôle vers l'équipement.
Un réseau EtherCAT peut avoir n'importe quelle topologie, mais en fait ce sera toujours un anneau - en raison de l'utilisation du mode duplex intégral et de deux connecteurs Ethernet. Ainsi, le télégramme sera toujours transmis séquentiellement à chaque appareil sur le bus.
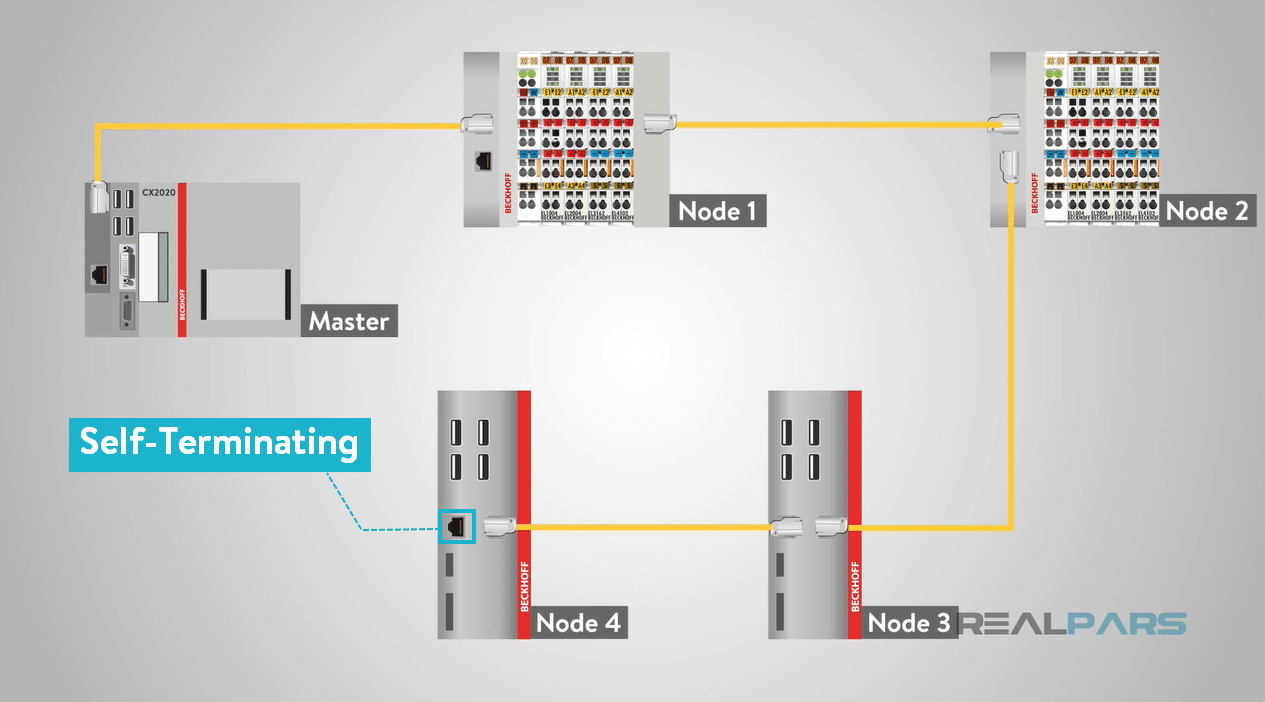 Représentation schématique d'un réseau Ethercat avec plusieurs nœuds. Source: realpars.com
Représentation schématique d'un réseau Ethercat avec plusieurs nœuds. Source: realpars.comSoit dit en passant, la spécification EtherCAT ne contient pas de limitations de la couche physique 100Base-TX, par conséquent, la mise en œuvre du protocole est possible sur la base du gigabit et des lignes optiques.
Réseaux Siemens Open Industry et normes PROFIBUS / NET
L'entreprise allemande Siemens est connue depuis longtemps pour ses contrôleurs logiques programmables (API), qui sont utilisés dans le monde entier.
L'échange de données entre les nœuds d'un système automatisé sous le contrôle des équipements Siemens est mis en œuvre à la fois via un bus de terrain appelé PROFIBUS et dans le réseau industriel PROFINET.
Le bus PROFIBUS utilise un câble spécial à deux fils avec connecteurs DB-9. Chez Siemens, il est violet, mais en pratique, nous en avons rencontré d'autres :). Pour connecter plusieurs nœuds, un connecteur peut connecter deux câbles. Il dispose également d'un interrupteur pour une résistance terminale. La résistance terminale doit être allumée aux périphériques d'extrémité du réseau, il est donc signalé que c'est le premier ou le dernier périphérique, et après cela, il n'y a rien, seulement l'obscurité et le vide (tous les rs485 fonctionnent de cette façon). Si vous allumez la résistance sur le connecteur intermédiaire, la section qui la suit sera déconnectée.
 Câble PROFIBUS avec connecteurs. Source: VIPA ControlsAmerica
Câble PROFIBUS avec connecteurs. Source: VIPA ControlsAmericaLe réseau PROFINET utilise un analogue d'un câble à paire torsadée, généralement avec des connecteurs RJ-45, le câble est peint en vert. Si la topologie PROFIBUS est un bus, la topologie du réseau PROFINET peut être n'importe quoi: au moins un anneau, au moins une étoile, au moins une arborescence, au moins tous pris ensemble.
 Contrôleur Siemens avec câble PROFINET connecté. Source: w3.siemens.com
Contrôleur Siemens avec câble PROFINET connecté. Source: w3.siemens.comPlusieurs protocoles de communication existent sur le bus PROFIBUS et sur le réseau PROFINET.
Pour PROFIBUS:
- PROFIBUS DP - la mise en œuvre de ce protocole implique la communication avec des esclaves distants, dans le cas de PROFINET, le protocole PROFINET IO correspond à ce protocole.
- PROFIBUS PA - est essentiellement le même PROFIBUS DP, utilisé uniquement pour les versions antidéflagrantes de transmission de données et de puissance (analogique de PROFIBUS DP avec d'autres propriétés physiques). Pour PROFINET, il n'existe pas encore de protocole antidéflagrant par analogie avec PROFIBUS.
- PROFIBUS FMS - conçu pour échanger des données avec des systèmes d'autres fabricants qui ne peuvent pas utiliser PROFIBUS DP. L'équivalent de PROFIBUS FMS dans le réseau PROFINET est le protocole PROFINET CBA.
Pour PROFINET:
- PROFINET IO;
- PROFINET CBA.
Le protocole PROFINET IO est divisé en plusieurs classes:
- PROFINET NRT (pas de temps réel) - utilisé dans les applications où les paramètres de temps ne sont pas critiques. Il utilise Ethernet TCP / IP ainsi que UDP / IP.
- PROFINET RT (temps réel) - ici l'échange de données d'entrée / sortie est mis en œuvre à l'aide de trames Ethernet, mais les données de diagnostic et de communication sont toujours transmises via UDP / IP.
- PROFINET IRT (isochronous real time) - Ce protocole a été développé spécifiquement pour les applications de contrôle de mouvement et comprend la phase isochrone de transfert de données.
Quant à la mise en œuvre du protocole temps réel dur PROFINET IRT, deux canaux de communication sont alloués pour la communication avec les équipements distants: isochrone et asynchrone. Un canal isochrone avec une durée de cycle d'échange de temps fixe utilise la synchronisation d'horloge et transmet des données critiques; des télégrammes de deuxième niveau sont utilisés pour la transmission. La durée de transmission dans le canal isochrone ne dépasse pas 1 milliseconde.
Dans le canal asynchrone, les données dites en temps réel sont transmises, qui sont également adressées via l'adresse MAC. De plus, diverses informations de diagnostic et auxiliaires sont déjà transmises via TCP / IP. Aucune des données en temps réel, et encore moins d'autres informations, bien sûr, ne peuvent interrompre le cycle isochrone.
Un ensemble étendu de fonctions PROFINET IO n'est pas nécessaire pour chaque système d'automatisation industrielle, par conséquent, ce protocole est mis à l'échelle pour un projet spécifique, en tenant compte des classes de conformité ou des classes de conformité: CC-A, CC-B, CC-CC. Les classes de conformité vous permettent de sélectionner des appareils de terrain et des composants de jonction avec la fonctionnalité minimale requise.
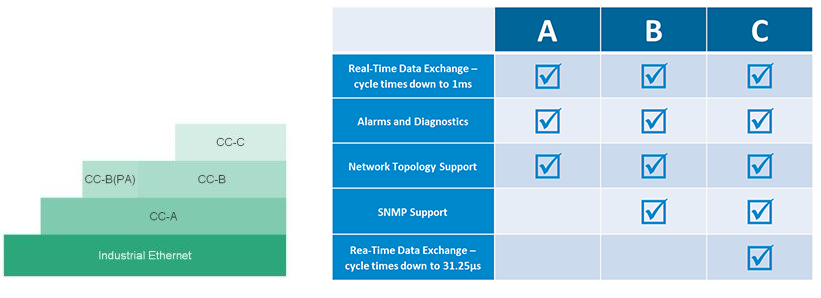 Source: leçon universitaire PROFINET
Source: leçon universitaire PROFINETLe deuxième protocole de communication du réseau PROFINET - PROFINET CBA - est utilisé pour organiser la communication industrielle entre les équipements de différents fabricants. L'unité de production principale des systèmes CBA est une certaine entité appelée composant. Ce composant est généralement une combinaison des parties mécaniques, électriques et électroniques de l'appareil ou de l'installation, ainsi que du logiciel d'application correspondant. Pour chaque composant, un module logiciel est sélectionné qui contient une description complète de l'interface de ce composant selon les exigences de la norme PROFINET. Ces modules logiciels sont ensuite utilisés pour échanger des données avec des appareils.
Protocole B&R Ethernet POWERLINK
Le protocole Powerlink a été développé par la société autrichienne B&R au début des années 2000. Il s'agit d'une autre implémentation du protocole en temps réel sur Ethernet. La spécification du protocole est disponible et distribuée librement.
La technologie Powerlink utilise le mécanisme du sondage dit mixte, lorsque toute l'interaction entre les appareils est divisée en plusieurs phases. Des données particulièrement critiques sont transmises dans la phase d'échange isochrone, pour laquelle le temps de réponse requis est configuré, le reste des données sera transmis autant que possible dans la phase asynchrone.
 Contrôleur B&R avec un ensemble de modules d'E / S. Source: br-automation.com
Contrôleur B&R avec un ensemble de modules d'E / S. Source: br-automation.comInitialement, le protocole a été implémenté au-dessus de la couche physique 100Base-TX, mais une implémentation gigabit a ensuite été développée.
Le protocole Powerlink utilise un mécanisme de planification des échanges. Un certain jeton ou message de contrôle est envoyé au réseau, à l'aide de celui-ci, il est déterminé lequel des appareils est actuellement autorisé à échanger des données. Un seul appareil peut avoir accès à l'échange à tout moment.
 Représentation schématique d'un réseau Ethernet POWERLINK avec plusieurs nœuds.
Représentation schématique d'un réseau Ethernet POWERLINK avec plusieurs nœuds.Dans la phase isochrone, le contrôleur d'interrogation envoie séquentiellement une requête à chaque nœud à partir duquel des données critiques doivent être reçues.
La phase isochrone s'effectue, comme déjà mentionné, avec un temps de cycle réglable. Dans la phase asynchrone de l'échange, la pile de protocoles IP est utilisée, le contrôleur demande des données non critiques à tous les nœuds qui envoient une réponse à mesure qu'ils accèdent à la transmission au réseau. Le rapport temporel entre les phases isochrones et asynchrones peut être réglé manuellement.
Protocole Ethernet / IP Rockwell Automation
EtherNet / IP a été développé avec la participation active de Rockwell Automation en 2000. Il utilise la pile IP TCP et UDP et l'étend pour une utilisation dans l'automatisation industrielle. La deuxième partie du nom, contrairement à la croyance populaire, ne signifie pas le protocole Internet, mais le protocole industriel. UDP IP utilise la pile de communication CIP (Common Interface Protocol), qui est également utilisée sur les réseaux ControlNet / DeviceNet et est implémentée sur TCP / IP.
La spécification EtherNet / IP est publique et gratuite. La topologie du réseau Ethernet / IP peut être arbitraire et inclure un anneau, une étoile, un arbre ou un bus.
En plus des fonctions standard des protocoles HTTP, FTP, SMTP, EtherNet / IP, il implémente le transfert de données critiques entre le contrôleur d'interrogation et les périphériques d'entrée / sortie. La transmission des données à temps critique est assurée par des paquets TCP et la livraison à temps critique des données de contrôle cyclique se fait via UDP.
Pour la synchronisation de l'heure dans les systèmes distribués, EtherNet / IP utilise le protocole CIPsync, qui est une extension du protocole de communication CIP.
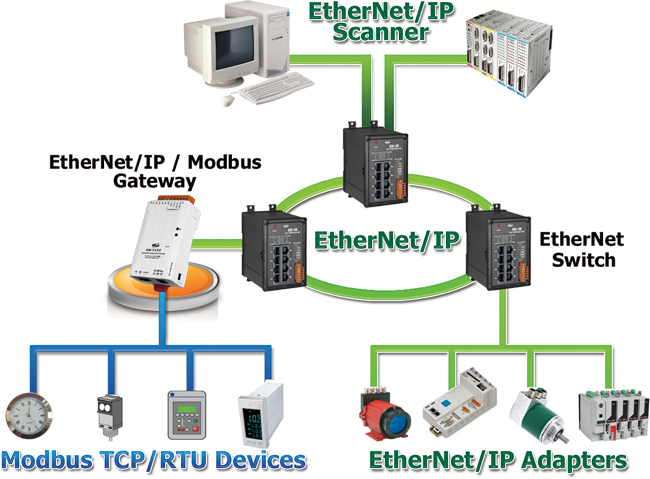 Illustration schématique d'un réseau Ethernet / IP avec plusieurs nœuds et périphériques Modbus. Source: www.icpdas.com.tw
Illustration schématique d'un réseau Ethernet / IP avec plusieurs nœuds et périphériques Modbus. Source: www.icpdas.com.twPour simplifier la configuration du réseau EtherNet / IP, la plupart des appareils d'automatisation standard sont livrés avec des fichiers de configuration prédéfinis.
Implémentation du protocole Fastwel FBUS
Ils ont longtemps réfléchi sur l'opportunité d'inclure la société russe Fastwel dans sa mise en œuvre nationale du protocole industriel FBUS dans cette liste, mais ils ont ensuite décidé d'écrire quelques paragraphes pour mieux comprendre les réalités de la substitution des importations.
Il existe deux implémentations physiques de FBUS. L'un d'eux est un bus dans lequel le protocole FBUS fonctionne au-dessus de la norme RS485. De plus, il existe une implémentation de FBUS dans un réseau Ethernet industriel.
Il est difficile d'appeler FBUS un protocole à haute vitesse, le temps de réponse dépend fortement du nombre de modules d'entrée / sortie sur le bus et des paramètres d'échange, il varie généralement entre 0,5 et 10 millisecondes. Un esclave FBUS ne peut contenir que 64 modules d'E / S. Pour un bus de terrain, la longueur de câble ne peut pas dépasser 1 mètre, il ne s'agit donc pas de systèmes distribués. Au contraire, cela va, mais uniquement lors de l'utilisation d'un réseau FBUS industriel sur TCP / IP, ce qui signifie une augmentation du temps d'interrogation de plusieurs fois. Des extensions de bus peuvent être utilisées pour connecter les modules, ce qui permet de placer facilement les modules dans l'armoire d'automatisation.
 Contrôleur Fastwel avec modules d'E / S connectés. Source: Control Engineering Russie
Contrôleur Fastwel avec modules d'E / S connectés. Source: Control Engineering Russie
Total: comment tout cela est utilisé dans la pratique dans ACS TP
Naturellement, la diversité des espèces des protocoles de transfert de données industriels modernes est beaucoup plus grande que celle décrite dans cet article. Certains sont liés à un fabricant spécifique, certains, au contraire, sont universels. Lors du développement de systèmes de contrôle de processus automatisés (APCS), l'ingénieur sélectionne les protocoles optimaux, en tenant compte des tâches spécifiques et des limites (techniques et budgétaires).
Si nous parlons de la prévalence d'un protocole d'échange particulier, nous pouvons donner un diagramme de HMS Networks AB , qui illustre les parts de marché de diverses technologies d'échange dans les réseaux industriels.
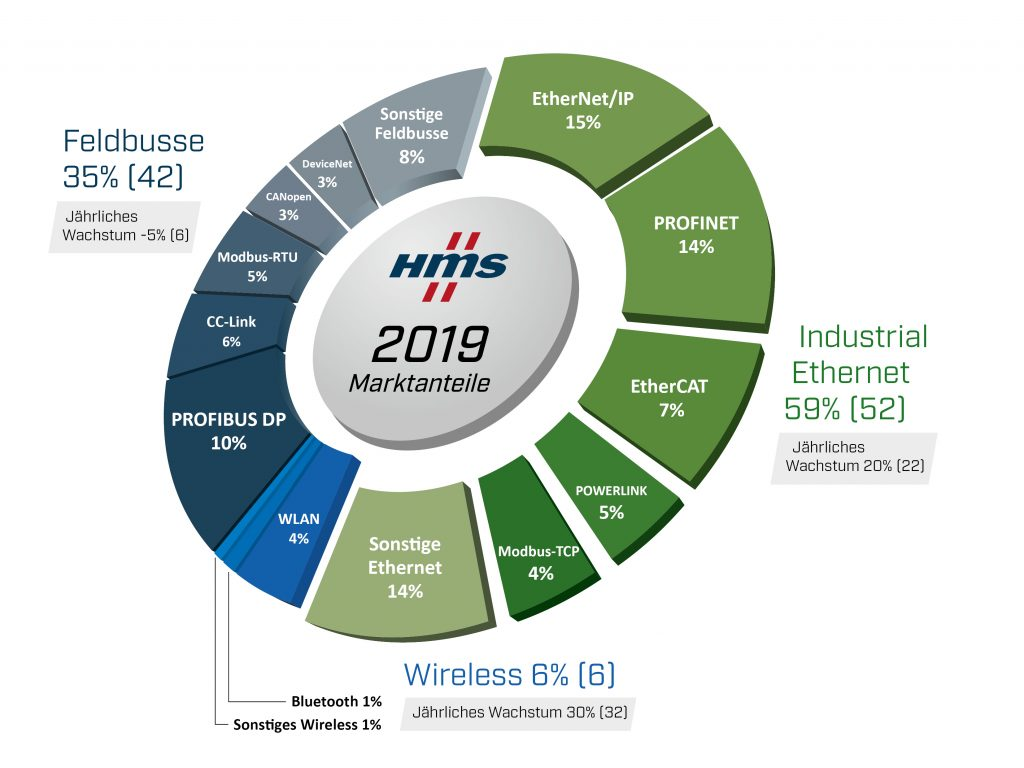 Source: HMS Networks AB
Source: HMS Networks ABComme vous pouvez le voir sur le schéma, PRONET et PROFIBUS de Siemens occupent une position de leader.
Il y a 6 ans,
les protocoles PROFINET et Ethernet / IP occupaient 60% du marché .
Le tableau ci-dessous résume les protocoles d'échange décrits. Certains paramètres, par exemple les performances, sont exprimés en termes abstraits: haut / bas. Des équivalents numériques peuvent être trouvés dans les articles sur l'analyse des performances.
Les applications des protocoles de communication, des bus de terrain et des réseaux industriels décrits sont très diverses. Des industries chimiques et automobiles à la technologie aérospatiale et à l'électronique. Les protocoles de communication à haut débit sont demandés dans les systèmes de positionnement en temps réel pour divers appareils et en robotique.
Avec quels protocoles avez-vous travaillé et où l'avez-vous utilisé? Partagez vos expériences dans les commentaires. :)