Bonjour à tous!
Dans cet article, je souhaite revenir sur la suite de la conception de la machine pour effectuer des tests physiques et mécaniques.
Permettez-moi de vous rappeler (la
première partie ) que cette machine (prototype) est de type cantilever et peut effectuer des tests de traction et de compression dans deux zones - supérieure et inférieure.
En plus du premier article sur la cinématique et l'assemblage, des poignées en relief avec des éponges ondulées, imprimées sur une imprimante 3D, ont été ajoutées au design, la boîte de vitesses du lève-vitre de voiture a agi comme un entraînement. Puisque nous parlons de l'unité de puissance, ce motoréducteur est plutôt faible, surtout à bas régime. Peut-être que dans les modifications suivantes du projet, j'installerai un motoréducteur avec un moteur pas à pas.
Je vais maintenant parler de logiciel. Je dois dire tout de suite que le programmeur de moi est moyen, tout ne s'est pas passé comme je le souhaitais, le programme est toujours très brut, même s'il fonctionne.
Le programme a été écrit dans l'environnement de programmation Delphi. Je changerais déjà la conception à ce stade, car il y a des moments inconfortables, mais pour l'instant je ne le ferai pas, je veux d'abord travailler sur l'algorithme principal.
L'électronique est basée sur un contrôleur Arduino et deux modules supplémentaires. Le firmware qu'il contient est téléchargé assez simplement, à savoir la collecte de données à partir de deux capteurs, la réception et la transmission de données via le port série et le contrôle du motoréducteur.
Pour travailler avec un port série, j'ai installé la bibliothèque ComPort. Les données de l'arduino ont été transmises sous forme de chaîne: S capteur de force / capteur de déplacement E (S123456 / 123E).
Le programme est à fenêtre unique, avec des dimensions de 800x600 pixels (afin de ne pas se soucier de la mise à l'échelle). Il contient plusieurs signets: Une nouvelle série de tests, Test, Paramètres.
Je vais commencer par le dernier signet - Paramètres.
Toutes les données reçues via le port sont affichées dans le terminal, j'en tire la chaîne, vérifie sa conformité et sépare les valeurs par variables.

Les variables sont multipliées par des coefficients pour correspondre aux valeurs réelles de masse et de déplacement.
On obtient tous ces coefficients dans le même onglet, dans les champs correspondant à la force, au déplacement ou à la vitesse.
Le coefficient de calcul de la vitesse fonctionne selon le principe inverse, il traduit la valeur (réelle) définie de la vitesse en celle que l'arduino comprend de 0 à 255.
Après avoir rempli tous les champs et calculé les coefficients, les données peuvent être enregistrées. Ils sont enregistrés dans le fichier Exel, car il est pratique de le visualiser et de le corriger si nécessaire.
Allons à la page - Test.
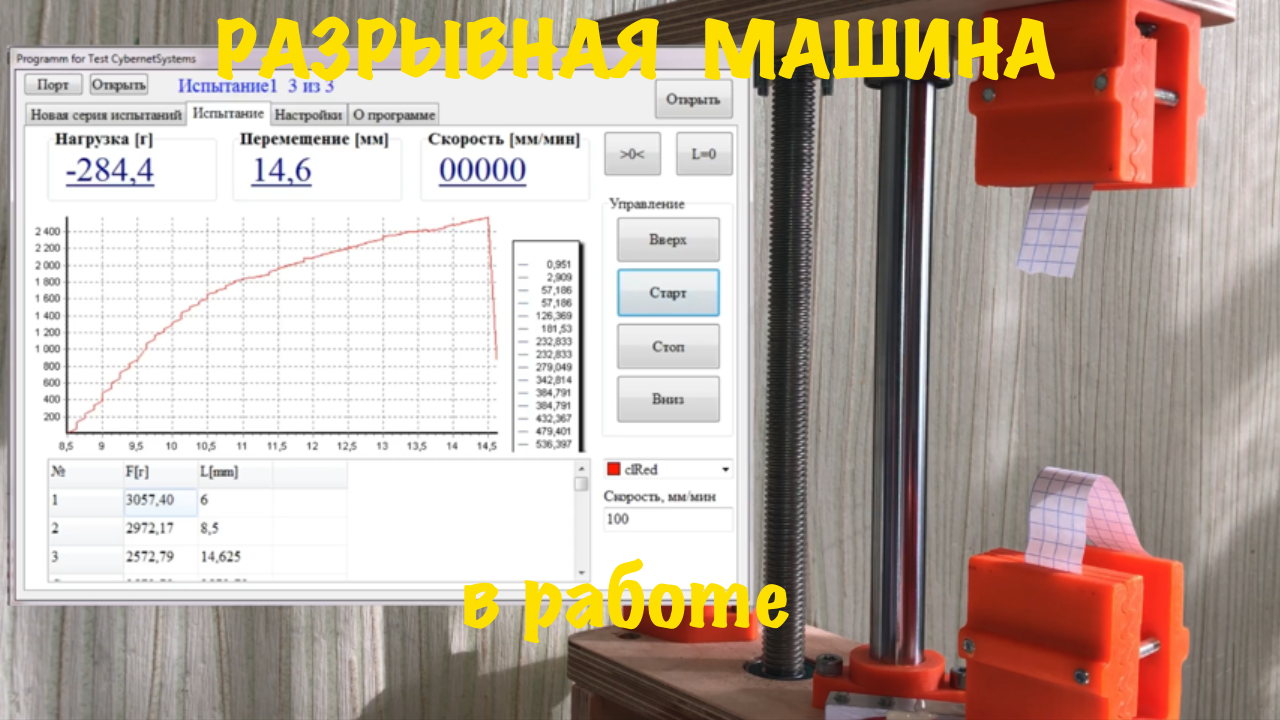
Ceci, vous pouvez dire, la page principale lorsque vous travaillez avec la machine. La partie supérieure affiche les données des capteurs. Les boutons de commande de la machine sont situés sur le côté droit: déplacer la chape mobile «Haut», «Bas» et «Arrêt». Le bouton "Démarrer" démarre le test avec la vitesse et la direction spécifiées dans la création du test, mais plus sur celle ci-dessous.
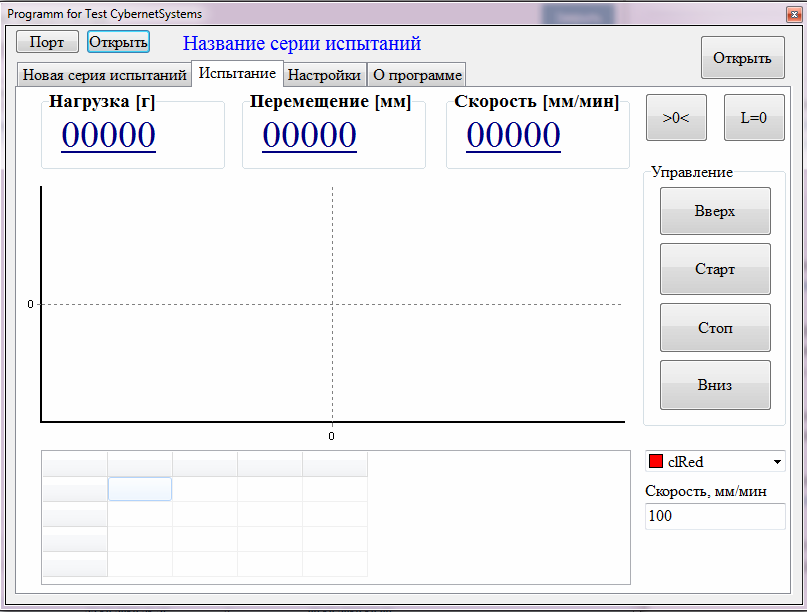
Dans la partie centrale, il y a une zone de sortie du programme de test, sous laquelle se trouve un tableau récapitulatif des résultats de la série de tests. Le tableau est rempli automatiquement après le test (destruction de l'échantillon), les valeurs maximales de force et de déplacement.
Pour commencer une nouvelle série de tests, nous allons passer au premier onglet.
Il doit indiquer le nom de la série de tests, le nombre de tests et la vitesse à laquelle le faisceau se déplacera pendant le test. Habituellement, pour les tests selon GOST, il est de 12 mm / min, mais dans mon cas, il est légèrement plus élevé, car le motoréducteur n'a pas assez de puissance à basse vitesse.

Ensuite, vous devez sélectionner le type de test: compression, tension ou cyclage; ainsi que le critère d'arrêt automatique de la machine à l'issue du test.
Il peut y avoir plusieurs critères de ce type - un arrêt pour atteindre une charge ou un déplacement donné, et une chute de charge lorsque l'échantillon d'essai est détruit.
Ce dernier est préférable, car il est possible de régler les butées à une charge qui augmente de façon non linéaire.
Le critère de la baisse de charge à l'arrêt est dû à la baisse de charge en pourcentage pour un temps donné.
Après avoir entré tous les paramètres requis pour les tests, cliquez sur le bouton "Démarrer" et accédez à la page "Test".
Nous installons l'échantillon dans les poignées, autant que possible coaxialement, afin que le test passe correctement.
Dans le programme, nous réinitialisons les valeurs de charge et de déplacement afin que le poids de l'échantillon et la tension préliminaire après serrage dans les pinces ne soient pas pris en compte.
En appuyant sur le bouton «Démarrer», la traverse mobile est mise en mouvement et un graphique commence à être dessiné à l'écran, qui montre comment la charge monte lentement. Ayant atteint sa limite physique, l'échantillon est détruit et la machine s'arrête. Dans le tableau récapitulatif sous le graphique, les valeurs de la charge maximale et de la déformation (déplacement) apparaissent. Vous pouvez ensuite passer au test suivant de la série.
A la fin du dernier test, les valeurs moyennes de la charge et du déplacement sont affichées dans le tableau récapitulatif.
Chaque série de tests stocke les paramètres de test et les données du tableau dans un fichier Excel. Ceci est pratique pour une analyse ultérieure dans d'autres programmes.
À l'avenir, je prévois d'améliorer le programme et de remplacer le variateur par un moteur pas à pas avec une boîte de vitesses, puis on verra ...