Dans le cadre du forum Skolkovo Robotics & AI, le 16 avril 2019, Moscou a accueilli la première réunion en Russie sur le Robot Operating System, un framework logiciel mondialement populaire qui implémente des algorithmes de base pour la construction de robots complexes. L'événement a donné une telle impulsion au développement de toutes les équipes. Nous avons plongé dans ce que nous aimons le plus: le développement! Par conséquent, ce n'est que maintenant que nous avons trouvé le temps de consolider les matériaux uniques de notre réunion, transmis par les conférenciers pour publication.
Parmi les visiteurs du plus grand forum de robotique en Russie, il y avait plus de 150 ingénieurs qui utilisent déjà ROS ou prévoient simplement de l'utiliser dans leurs projets. C'est un bon résultat pour la première réunion d'une petite communauté de développeurs ROS russes. Nous nous efforçons de faire partie du mouvement mondial - et des centaines de participants rassemblent déjà des événements similaires à l'étranger.
Le deuxième Meetup Russian ROS se tiendra le 30 novembre 2019 .
Merci encore à tous ceux qui sont venus et ont consacré leur temps à une étude détaillée des rapports et des questions délicates. Tout cela a montré qu'il y a un grand intérêt de la part de la communauté pour le développement de ROS et qu'il est nécessaire de poursuivre le travail régulier pour tenir de telles réunions. Nous grandissons lorsque nous partageons les meilleures pratiques et améliorons l'un des outils de développement de robots les plus courants au monde - Robot Operating System.
Nos conférenciers étaient des développeurs de pratique avec des sujets de leur expérience réelle. Par conséquent, les matériaux présentés dans cette publication reflètent les possibilités d'utiliser ROS dans des projets existants et en cours.
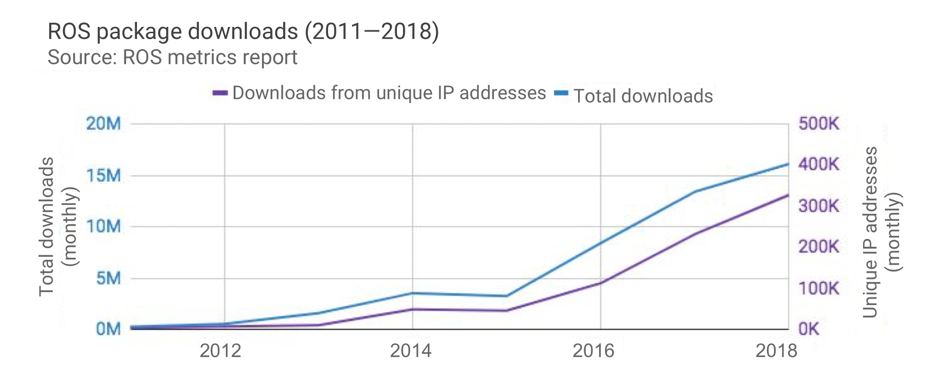
La communauté mondiale de ROS est actuellement la communauté robotique la plus grande et la plus ouverte au monde. Le nombre de téléchargements ROS a augmenté de près de 6 fois depuis 2014! De toute évidence, c'est l'outil le plus important pour ceux qui créent des robots, donc nous, au Sberbank Robotics Laboratory, soutenons tous ceux qui partagent les valeurs ROS avec nous et souhaitent échanger leurs expériences.
Si vous développez de nouveaux algorithmes pour les robots, l'écriture d'un package pour ROS est une bonne solution pour les intégrer dans des robots existants et faire la démonstration au monde.
Si vous ne faites que commencer votre voyage en robotique, alors l'apprentissage de ROS vous aidera à maîtriser les technologies modernes et à vous intégrer dans la communauté.
Le premier Meetup ROS était plein de rapports intéressants. Mais comme tout le monde n'a pas pu assister à l'événement à Moscou, nous téléchargeons des vidéos et des diapositives de présentation pour vous:
Introduction à ROS. Idéologie et état actuel.Alexey Burkov, Laboratoire de robotique Sberbank.Le rapport parle de l'apparition de ROS, de ses concepts et des personnes qui l'ont développé, ainsi que de l'état actuel du cadre dans la communauté mondiale.
Lien vers les diapositives de présentation.
Expérience de l'utilisation de ROS en robotique compétitive en utilisant l'exemple d'Eurobot.Alexey Postnikov, Sberbank Robotics Laboratory.Le rapport traite du système de localisation de robots utilisant des marqueurs Aruco utilisant ROS.
Lien vers les diapositives de présentation.
Au fait, vous pouvez participer aux compétitions Eurobot en rejoignant l'équipe SetUp soutenue par le laboratoire de robotique Sberbank - c'est un excellent moyen d'apprendre la robotique et les ROS, et de mettre vos compétences en pratique. Pour participer, écrivez une lettre à robotics@sberbank.ru.Navigation SLAM et laser lidar.Alexey Burkov, Laboratoire de robotique Sberbank.L'histoire de la façon dont nous avons utilisé ROS pour naviguer dans un robot de messagerie à l'aide de SLAM et d'un planificateur de parcours a couvert les sujets suivants:
- Création d'une carte de pièce et de la localisation du robot à l'aide de l'algorithme Gmapping
- Localisation du robot sur la carte par l'algorithme AMCL.
- Navigation par robot via MoveBase et DWA.
Lien vers les diapositives de présentation.
Vous pouvez obtenir un stage au laboratoire de robotique Sberbank sur les sujets du courrier et du ROS, pour cela, écrivez une lettre à robotics@sberbank.ru.Un robot planificateur de parcours prenant en compte une carte donnée et des obstacles dynamiques à l'aide de l'exemple d'Eurobot.Alexander Gamayunov, Laboratoire de robotique Sberbank.L'histoire de la création de votre propre planificateur d'itinéraire basé sur A *, T *, Costmap Server, Global Planner, STM32 Driver et l'algorithme Ramer-Douglas-Pecker pour participer aux compétitions internationales d'Eurobot.
Lien vers les diapositives de présentation.
Expérience de l'utilisation de ROS dans le système de contrôle d'un véhicule autonome sous-marin non habité «Cousteau 2»Timur Akhtyamov, UCM Hydronautics.Simulation de véhicules sous-marins. Utilisation de machines d'état SMACH. Série de wrapper ROS. Le déclencheur des codes QR. API Roslaunch pour démarrer et arrêter les fichiers de lancement à partir du code Python. Démarrage automatique des nœuds au démarrage du système d'exploitation.
Lien vers les diapositives de présentation.
BelAZ chez ROS et VIST Group créent des solutions minières.Elizaveta Shpiev, Groupe VIST.L'histoire de la façon dont le groupe VIST utilise ROS pour créer une carrière intelligente.
Lien vers les diapositives de présentation.
Tester le code dans ROS est de savoir comment construire une voiture sans pilote et ne rien casser.Oleg Shipitko, Visillect.Histoire d'utiliser Google Test (C ++), Unittest (Python) et Rostest pour les tests dans ROS.
Lien vers les diapositives de présentation.
La vision par ordinateur dans les robots est la capture d'objets par un manipulateur en fonction des données d'une caméra RGBD.Alexander Syomochkin, Sberbank Robotics Laboratory.À propos de l'utilisation de la caméra RGBD pour capturer des objets avec un robot avec un manipulateur.
Lien vers les diapositives de présentation.
L’unification du développement mondial unifié des ROS.Konstantin Konogorsky, groupe VIST.La suite de l'histoire de la carrière intellectuelle du groupe VIST, ou comment allier l'inextricable.
Lien vers les diapositives de présentation.
ROS Docker lance une image ROS virtuelle sur un ordinateur Linux.Alexander Syomochkin, Sberbank Robotics Laboratory.Rapport sur l'utilisation de Docker pour créer et exécuter une image ROS virtuelle sous Linux.
Lien vers les diapositives de présentation.
Quels appareils écoutent et de quoi ils parlent.Alexander Menshikov, Sberbank Robotics Laboratory.Utilisation de ROS pour créer des services de communication vocale.
Lien vers les diapositives de présentation.
La dernière réunion ROS a donné aux participants beaucoup d'émotions positives et de rapports intéressants sur l'utilisation de ROS dans la robotique moderne en Russie, et nous espérons développer davantage la communauté russe ROS avec votre aide. Par conséquent, nous invitons tout le monde à faire une présentation lors du prochain ROS Meetup le 30 novembre 2019 à Moscou.
forms.gle/G3ggYcvFLfuJw1ur6En plus de ROS Meetup, nous effectuons également des stages ROS au laboratoire de robotique Sberbank pour nos projets, plus de détails peuvent être trouvés
ici .
Si vous souhaitez en savoir plus sur notre travail ou les directions de développement de la robotique moderne, nous vous recommandons de lire attentivement la
revue analytique annuelle
du marché mondial de la robotique .
Il nous semble que la première expérience de rassemblement de la communauté a été correcte et positive - nous allons continuer. Et la
prochaine rencontre ROS est prévue pour le 30 novembre 2019 !
Vous pouvez participer en tant qu'auditeur en remplissant une
candidature et en attendant la confirmation de votre participation au courrier.
