
Une équipe combinée d'ingénieurs suisses et allemands a transformé une pelle araignée conventionnelle en un robot autonome capable de creuser des tranchées d'une configuration spécifique. De plus, la précision de creuser des tranchées est assez élevée - 3 centimètres.
Selon les développeurs du projet, les constructeurs ont besoin de tels appareils, car ils peuvent accélérer le processus de creusement de tranchées sur un chantier de construction. De plus, le robot peut creuser une tranchée avec plus de précision qu'une personne (sauf, bien sûr, des spécialistes de haut niveau). Mais il y a un problème - par exemple, la difficulté d'afficher une carte de l'espace environnant pour le robot. Un autre problème est la détermination par le robot de son propre emplacement dans une configuration de site en évolution rapide.

Mais tout a fonctionné - les ingénieurs, dirigés par le scientifique Marco Hutter, ont néanmoins développé une pelle autonome capable de creuser des tranchées de différentes configurations avec une précision et une vitesse élevées. La base de la création du robot était la pelle araignée Menzi Muck M545. Les développeurs du robot ont décidé de remplacer les systèmes hydrauliques de la pelle par des systèmes «intelligents», dans lesquels divers capteurs et capteurs sont installés.
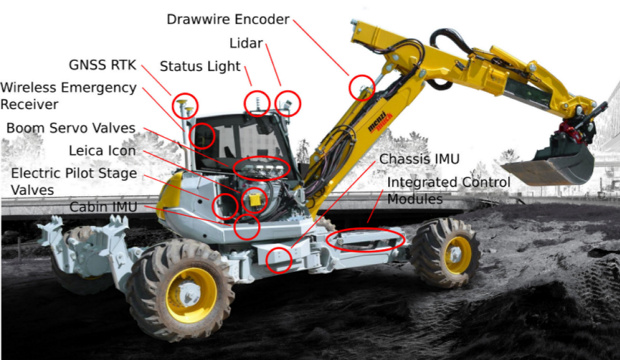
Ils permettent au système de «comprendre» et de suivre la force de l'interaction avec le sol. La pelle est également équipée de capteurs GPS et de récepteurs RTK, ce qui augmente la précision de la détermination de l'emplacement du système, ainsi que des lidars et des centrales inertielles. Grâce au raffinement, la pelle a appris à déterminer avec précision son emplacement, tout en "imaginant" le type de sol à creuser.
Pour le robot, des algorithmes spéciaux ont été créés qui ont permis de créer un modèle d'environnement, calculant avec précision le système de mouvements du godet nécessaire pour créer la tranchée de la forme souhaitée. L'une des difficultés rencontrées par les scientifiques est que le sol, une fois le seau sorti de la tranchée, s'effondre. C'est-à-dire une certaine quantité de terre revient au lieu de son excavation. Les algorithmes offrent une telle opportunité et l'excavatrice «sait» quoi faire.
Le robot a ensuite été testé sur l'un des chantiers, il avait besoin de creuser une tranchée avec un profil en forme de trapèze. Après l'achèvement des travaux, il s'est avéré que la précision du système est d'environ 3 centimètres. Et cela est beaucoup plus élevé que la précision obtenue par d'autres développeurs.
À l'avenir, ce robot excavateur sera testé dans d'autres conditions. Le résultat devrait être un robot qui sait fonctionner lui-même, sans supervision ni soutien de l'extérieur. Un tel robot aidera efficacement les constructeurs, accélérant le processus de creusement de tranchées.
Ce n'est pas le seul projet de l'équipe de scientifiques mentionnée ci-dessus. Elle travaille depuis plusieurs années sur la robotisation de pelles et autres systèmes qui fonctionnent sur un chantier de construction. Ainsi, une pelle araignée similaire a été transformée
en une unité contrôlée par un opérateur à distance .