Salutations, très chers!
«Coupe hydrophone hydroacoustique» ©
D'après nos articles précédents, la situation n'a pas fondamentalement changé: nous n'avons toujours pas exploré la majeure partie de l'
étang océanique mondial, ce qui signifie que nous devons augmenter la pression.
Donc, je renforce comment je peux.
Aujourd'hui, je vais parler en détail et «sur les doigts» de différents types de systèmes de navigation sous-marine en fonction de la classification incorrecte établie, de ce qu'ils sont, quels sont les avantages et les inconvénients, en général, dans quel cas où courir, sur quoi appuyer et où tourner.
Achtung: des traces de matan peuvent être présentes dans l'article!
Si les eaux calmes de votre âme ont attisé ce signal, bienvenue à Kat!
En ce qui concerne
[1] les systèmes de positionnement acoustique, leur type est toujours indiqué comme USBL, LBL, SBL. «BL» signifie ici Baseline, c'est-à-dire référence. Ici, je propose et commence.
Quelle est la ligne de base?
La ligne de base est formée de deux points de référence, dont la position relative est connue à un moment donné. La première image montre comment ces points de référence ainsi que celui souhaité déterminent l'ensemble des triangles spatiaux (
), dont la base est la référence (
)
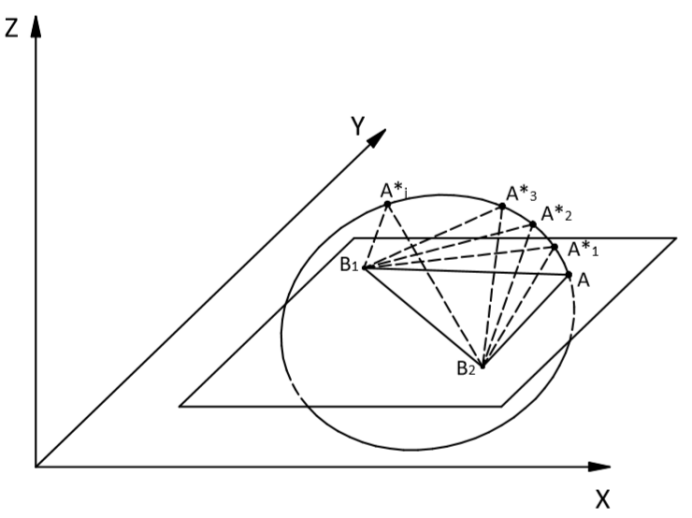 La ligne de base définit le point souhaité sur le cercle.
La ligne de base définit le point souhaité sur le cercle.Le triangle est défini par:
- ou sur la base et deux gammes, mesurées des deux points de référence au point souhaité, dans ce cas nous parlons de trilatération;
- ou à la base et aux deux coins, ce qu'on appelle la triangulation.
Digression lyriquePendant que j'écrivais un article, je réfléchissais à la façon dont je m'y suis mis.
Je me suis souvenu que lorsque j'étais enfant, j'ai regardé un film où, dans le monde post-apocalyptique, des gens chassaient des dragons (ce qui provoquait l'apocalypse), pour lesquels ils calculaient leur position dans les airs, plaçaient des «balises» au sol, et j'ai clairement appris depuis que pour une image complète des phares il en fallait trois. Le mot "triangulation" est fermement enraciné dans le cerveau des adolescents. Je me souviens de ce que je pensais alors: comme ce serait cool d'être développeur de telles choses.
En fait, bien, me voici!
La définition d'un triangle signifie la détermination des coordonnées du point souhaité.
L'utilisation de triangles pour déterminer la position remonte aux profondeurs des siècles et les premières références sont déjà dans les travaux de
Thales [2] et
Euclid [3] .
Une ligne de base donne de nombreux triangles dont les sommets se trouvent sur un cercle. Et pour déterminer l'emplacement du point souhaité dans l'espace à n dimensions, n + 1 lignes de base sont nécessaires. Le nombre de lignes de base requises peut être réduit à n si l'une des coordonnées du point souhaité est connue, par exemple la profondeur (ou la hauteur
de vol du dragon ), qui est souvent connue par mesure directe.
La définition ci-dessus de la référence se réfère généralement aux méthodes de triangulation et de trilatération, mais elle peut être étendue à la méthode de multilatération [4].
Dans ce cas, les angles et les gammes jusqu'au point souhaité sont inconnus, mais la différence entre ce dernier est connue (par exemple, le moment d'émission du signal par l'objet souhaité est inconnu, mais les moments de son arrivée aux deux points de référence sont connus et mesurés par des horloges synchronisées, c'est-à-dire le délai entre l'arrivée du signal à points de référence).
Le temps d'arrivée du signal multiplié par la vitesse de propagation du signal est communément appelé pseudo-plage.
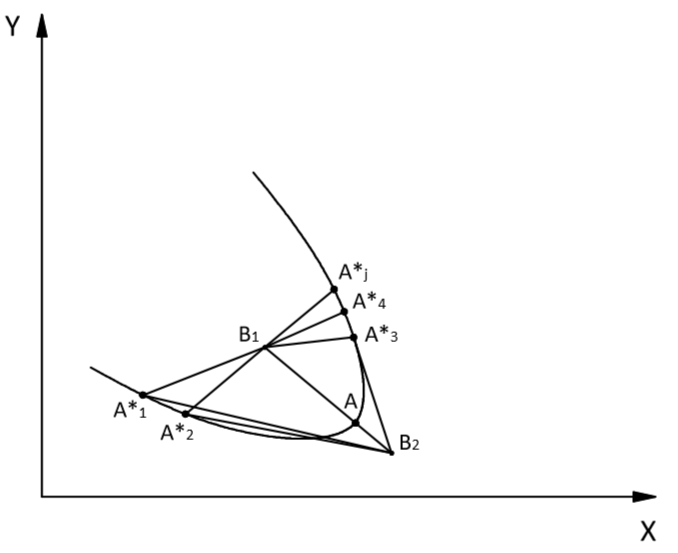 La ligne de base pour la multilatération détermine le point souhaité sur l'hyperbole
La ligne de base pour la multilatération détermine le point souhaité sur l'hyperboleD'après l'image ci-dessus, il est facile de voir que de cette manière, un nombre infini de triangles peut être défini (
) dont les sommets représentant la position du point souhaité se trouvent sur l'hyperbole. Dans ce cas, les points d'ancrage seront les foyers de l'hyperbole.
Ici, comme dans le cas de la triangulation, la position du point souhaité est complètement déterminée par n + 1 lignes de base pour l'espace à n dimensions.
Mauvais mot pour les contrôles à l'exportation
Le fait est que, selon l'emplacement des coordonnées, il existe deux classes de systèmes:
- en fait la navigation (directement appelée systèmes de navigation), où les coordonnées sont générées sur l'objet lui-même (comme dans le GPS).
- systèmes de suivi (surveillance), quand par exemple il y a une sorte de balise sur l'objet et que nous le portons.
Donc, pour le contrôle des exportations, ce mot est très mauvais et ne convient pas, ce qui a été tragiquement vérifié par notre propre expérience. Expliquer à la machine bureaucratique que ce n'est "pas du tout ce que vous pensiez" est très difficile et depuis lors, nous avons appelé de tels systèmes de positionnement des systèmes.
Vogue ringard, ilCompte tenu des ambiguïtés de la traduction, il convient de mentionner que le système de positionnement ne doit pas être confondu, par exemple, avec le soi-disant positionnement dynamique à bord des navires, systèmes de positionnement dynamique (ing. DP, positionnement dynamique), il s'agit généralement d'une zone adjacente, mais signifie un peu différent - des systèmes qui permettent à un navire de maintenir sa position géographique et son orientation (cap), "planer" en un seul endroit.
Classification généralement acceptée en fonction de la taille relative de la ligne de base et de son caractère incomplet
Revenons maintenant aux premières lettres des abréviations USBL, LBL et SBL. Ils déterminent la taille relative des lignes de base.
En général, elle est déterminée par rapport à la taille maximale de la trajectoire possible d'un objet positionné.
Si c'est assez simple à expliquer, par exemple, nous avons
forcé le plongeur convaincu à accrocher la balise de l'accusé sur lui-même et à vouloir surveiller ses mouvements. «Taille maximale de la trajectoire possible d'un objet positionné» est le diamètre du cercle où toute la trajectoire de son mouvement s'adaptera.
Vogue ringard, ilPour toute gravité, il faut mentionner que la trajectoire du plongeur est définie dans le système de coordonnées associé à la base de mesure. C'est-à-dire si nous suivons un plongeur depuis un canot pneumatique d' un navire de soutien et que nous dérivons avec lui, alors en principe, nous pouvons dériver sur quelques kilomètres (en réalité, cela ne peut pas être fait avec des plongeurs, mais avec un robot télécommandé - complètement). Et la trajectoire par rapport à notre navire est estimée.
Il est clair que l'attribut de classification est moyen, et je suis entièrement d'accord. Néanmoins, la classification généralement acceptée est structurée de cette façon. Et ils distinguent:
- USBL, ligne de base ultra-courte - systèmes à base ultra-courte, où les dimensions des lignes de base sont beaucoup plus petites que la trajectoire de l'objet positionné et
- SBL, short baseline - systèmes à base courte où les dimensions des lignes de base sont comparables à la trajectoire d'un objet positionné,
- LBL, longue ligne de base - systèmes à longue ligne de base où les dimensions des lignes de base dépassent considérablement les dimensions de la trajectoire de l'objet positionné.
Il y a une certaine ambiguïté dans le choix de la classe entre les systèmes à base courte et longue, et souvent, comme l'un des signes des systèmes à base courte, ils indiquent une connexion rigide des éléments de support les uns avec les autres - par exemple, lorsqu'ils sont fixés sur un navire. Les éléments de support du système à base longue ne sont en aucun cas reliés cinématiquement, c'est-à-dire les changements dans leurs positions dans l'espace ne sont pas corrélés.
Nous considérons maintenant les trois types et certaines de leurs combinaisons plus en détail en termes de leurs forces et faiblesses.
Systèmes à base ultra-courte
Comme son nom l'indique, la ligne de base dans les systèmes à base ultra-courte (systèmes UKB) est beaucoup plus petite que la trajectoire de l'objet positionné.
En règle générale, dans la plupart des systèmes UHF existants (par exemple,
ce [5] ,
ce [6] et
ce [7] ), la taille des lignes de base va des unités aux dizaines de centimètres. La plupart d'entre eux sont des systèmes goniométriques - c'est-à-dire des systèmes qui déterminent l'angle d'arrivée du signal du beacon-responder ou du pinger.
En termes d'aménagement, de tels systèmes consistent en:
- une station de base - un dispositif contenant une antenne de réception à éléments multiples, dont les éléments individuels forment soit un réseau d'antennes phasé, dans ce cas, l'angle d'arrivée est déterminé à partir de la différence de phase du signal entrant entre les éléments individuels, ou d'un ensemble de lignes de base, également formées de paires d'éléments individuels, en dans ce cas, l'angle d'arrivée est déterminé par différents retards dans l'arrivée du signal aux éléments;
Afin de ne pas jouer avec le droit d'auteur sur les images, je vais donner notre Zima-Base comme exemple de station de base:
Sur la table:

Au moment du travail:

- les répondeurs de balise répondant à une demande de la station de base, ce qui permet à son tour de déterminer le temps de propagation du signal entre la balise et la station de base (plage oblique) ou pingers, contrairement aux répondeurs de balise, émettant un signal à intervalles réguliers. Pinger peut être pré-synchronisé avec la station de base, ce qui permet une mesure unidirectionnelle du temps de propagation.
À titre d'exemple, je vais à nouveau donner la balise-répondeur de notre système Zima:
Autonome avec cartouche de batterie:

À bord du TNLA:

Il existe également des systèmes dans lesquels les transpondeurs sont couplés électriquement à une station de base et le signal d'interrogation est fourni sous forme d'impulsion de grille électrique.
Ainsi, la classe des systèmes UKB est représentée par une gamme assez large de diverses exécutions spécifiques, et souvent le classement d'un système comme UKB ne fournit pas suffisamment d'informations sur la méthode spécifique de son fonctionnement.
L'image suivante illustre le principe de fonctionnement généralisé des systèmes UKB.
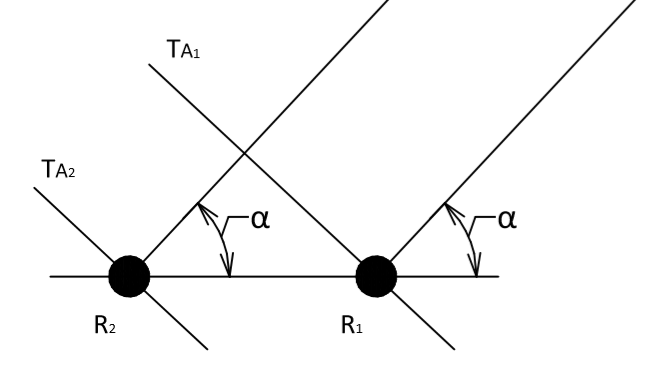 Démonstration du principe de fonctionnement des systèmes qui déterminent l'angle d'arrivée d'un signal
Démonstration du principe de fonctionnement des systèmes qui déterminent l'angle d'arrivée d'un signalLa figure ci-dessus montre une paire de transducteurs de réseau d'antennes qui reçoivent un front de signal plat. D'une distance connue
entre transducteurs et retard mesuré
déterminé par l'angle
arrivée du signal.
Les avantages évidents des systèmes UKB comprennent la petite composition requise de l'équipement et le déploiement rapide du système.
Dans le cas général, le répondeur ou le doigt peut être
enveloppé avec du ruban adhésif simplement fixé sur un objet positionné, ce qui augmente l'universalité du système dans son ensemble.
Dans certains cas pratiques, l'utilisation des systèmes UKB n'est pas contestée. Par exemple, lorsqu'une recherche est effectuée pour quelque chose d'
immergé accidentellement qui a coulé et qu'il n'est pas possible d'établir une longue base à l'avance compte tenu de l'immensité de la zone de recherche, ou lorsque la profondeur du lieu ne permet pas d'établir une longue base flottante, et l'installation de la base inférieure n'est pas justifiée en termes de délai et / ou de météo conditions.
Cependant, les systèmes UKB présentent certains inconvénients graves. Par exemple, pour déterminer la position d'un objet positionné en coordonnées absolues, la station de base elle-même doit être entièrement définie dans l'espace: vous devez connaître non seulement sa position géographique mais également l'orientation du réseau de récepteurs dans l'espace: angle azimutal, angles de roulis et de trim.
Autrement dit, d'un point de vue structurel, le système UHF devrait inclure non seulement un réseau d'antennes multi-éléments, qui est en soi assez complexe sur le plan structurel, mais également des dispositifs qui peuvent déterminer sa position dans l'espace - des capteurs d'inclinaison le long de deux axes horizontaux et un capteur cap - compas magnétique ou GNSS. Si l'antenne radiogoniométrique est installée sur quelque chose sous l'eau, la possibilité d'utiliser la boussole GNSS est donc fermée.
De plus, puisque la position de l'objet recherché est estimée soit par deux angles d'arrivée du signal (horizontal et vertical) soit par l'angle et la profondeur horizontaux (à la mode et progressifs) transmis dans le signal du répondeur ou du pinger, il est évident que la précision angulaire finale
systèmes fourniront de plus en plus avec une gamme de deux
l'erreur de la position déterminée de l'objet positionné, croissant avec la distance, est proportionnelle à la tangente de l'erreur angulaire, ce qui est illustré dans l'image suivante:
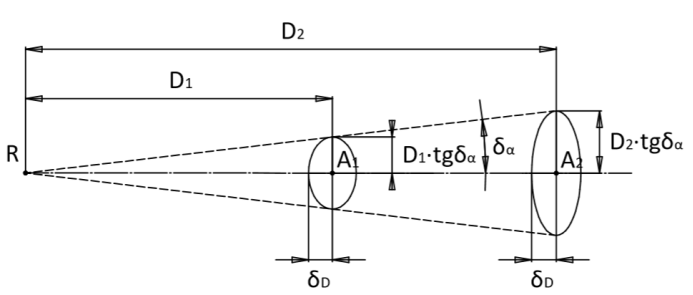 Influence de la précision angulaire des systèmes UKB sur l'erreur de détermination de la position d'un objet positionné
Influence de la précision angulaire des systèmes UKB sur l'erreur de détermination de la position d'un objet positionnéLa figure ci-dessus montre la répartition de l'emplacement déterminé de la source de signal. L'un des demi-axes de l'ellipse
déterminé par l'erreur de mesure de la distance, et l'autre, comme
où D est la distance (plage oblique) à la source.
De plus, en cas d'ambiguïté et d'impossibilité de garantir l'identification d'un faisceau direct (faisceau - lire l'avant du signal, appeler directement celui qui provenait directement de la source, sans réflexion de quoi que ce soit), les systèmes UHF dans leur ensemble sont très fortement influencés par la propagation par trajets multiples, surtout si il y a des reflets du littoral ou de tout élément du paysage sous-marin.
En d'autres termes, en présence de signaux réfléchis puissants provenant d'autres directions (jusqu'à l'opposé), le système UHF n'est pas à l'abri d'accepter un tel signal comme direct (car en général ce problème est insoluble - la somme des signaux réfléchis peut être plus puissante, "plus forte" que directe et telle) parfois en pratique), ce qui conduit à des résultats complètement incorrects dans la résolution du problème de navigation.
Les nouveaux systèmes utilisent une mesure directe de la profondeur du transpondeur ou du doigt, tandis que les anciens systèmes déterminent la position sous deux angles. Le fait est que l'angle vertical a le moins de certitude, car le son dans son ensemble peut subir de multiples réflexions de la surface inférieure et sa définition n'est pertinente qu'aux plus petites distances. Ceci est montré dans l'image ci-dessous, où la section verticale du canal est montrée dans l'image supérieure, et on peut voir que lors de la détermination de l'angle vertical à partir de l'un des signaux réfléchis, l'erreur peut être complètement inacceptable. En même temps, dans la partie inférieure de la figure, qui montre une vue de dessus, il est clair que tous les signaux réfléchis proviennent de la même direction horizontale.
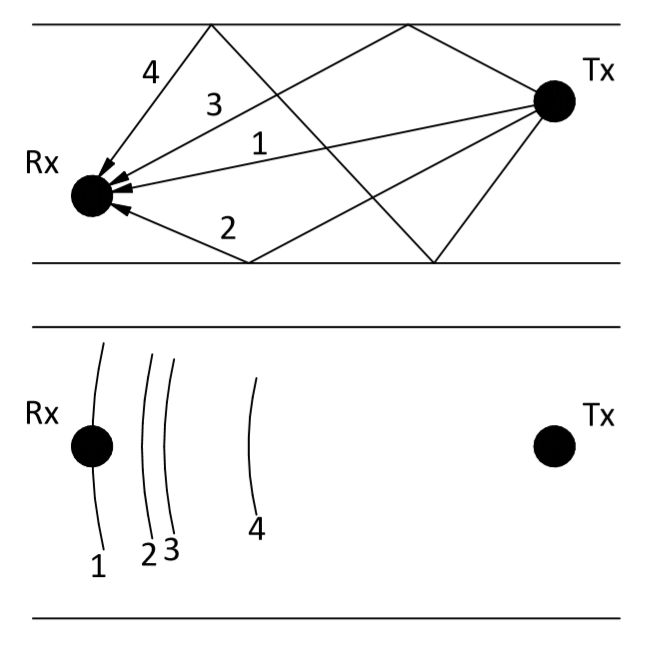 Précision différente dans la détermination des angles horizontaux et verticaux dans les systèmes UKB
Précision différente dans la détermination des angles horizontaux et verticaux dans les systèmes UKBEn résumant la discussion sur les systèmes UCB, nous pouvons dire que leur domaine d'application est où il est difficile, injustifié ou impossible d'utiliser d'autres types de systèmes de navigation et de systèmes de positionnement.
Les fabricants de systèmes UKB modernes rapportent une précision angulaire de leurs produits jusqu'à 0,03 ° (1σ)
[8] .
Leur avantage: vitesse de déploiement et polyvalence.
D'après l'expérience de la communication avec les utilisateurs, je peux dire que tout le monde autour ne veut que UKB simplement en raison de la vitesse de déploiement. Et peu importe combien j'explique, peu importe combien j'écris, tout le monde acquiesce, mais ils veulent toujours utiliser l'UCB. Comme dit le proverbe: "n'oubliez pas de souffrir".
Certains inexpérimentés utilisent généralement l'abréviation USBL comme désignation pour tout système de positionnement sous-marin.
Vogue ringard, ilUne curiosité encore plus curieuse est quand toute chose hydroacoustique est appelée sonar. Nous sommes des gars lettrés, et nous nous souvenons qu'un sonar est comme un radar, uniquement avec du son, c'est-à-dire un sonar, mais c'est une histoire complètement différente.
Systèmes à base courte
Les systèmes à base courte dans la grande majorité des cas sont situés sur les coques de navires spécialisés. Autrement dit, les dimensions des lignes de base sont comparables aux dimensions du navire.
À l'heure actuelle, la précision des systèmes UHF est assez élevée et la commodité d'utilisation semble beaucoup plus rentable que pour KB, ce qui a conduit à évincer les systèmes KB d'une utilisation généralisée, et les tâches résolues par les systèmes KB incluent désormais uniquement ceux qui ont des conditions spécifiques qui ne permettent pas appliquer le système UKB.
Cependant, dans le passé, des bureaux d'études ont été utilisés, par exemple, pour escorter le bathyscaphe Triest-1 jusqu'au site de la mort du sous-marin US Navy Thresher (USS Thresher). Le système SHARPS SBL KB a été utilisé à l'Institut océanographique du trou Woods pour accompagner le véhicule hauturier JSON jusqu'à sa béquille MEDEA, la précision de positionnement obtenue de 0,09 m est rapportée [9].
Parmi les systèmes KB modernes, on peut noter
celui-ci [10] , positionné par le constructeur comme «GPS sous-marin», et distribué en tant que designer.
Afin que l’œil puisse saisir et ressentir tout le charme et la «simplicité» du déploiement, je vais vous donner quelques photos de nos récents tests du prototype du système KB pour stationner un véhicule sous-marin autonome:

Le cadre en aluminium est la base courte. Vous pouvez imaginer la commodité de lancer cette conception.

En toute justice, il convient de dire que, dans toute l'idéologie du travail, il ne devrait descendre qu'une seule fois. Nous avons également dû l'augmenter lors des tests - le profil coûte de l'argent, et les hydrophones ne mentent pas sur la route.
En résumant l'examen des systèmes KB, nous notons que:
Les avantages des systèmes KB incluent:
- vitesse de déploiement et de mobilité (les systèmes sont généralement montés sur un navire);
- en moyenne, une plus grande précision par rapport aux systèmes UKB (bien que, cependant, il faut garder à l'esprit que certains UKB de grande classe, par exemple [8] , affichent généralement une précision de positionnement plus élevée que certains KB plus simples comme le GPS Waterlinked déjà mentionné [10] ) .
Par contre, KB peut inclure les mêmes inconvénients inhérents aux systèmes UHF, à savoir:
- la nécessité de déterminer l'orientation de la base de mesure (lignes de base) - aux coins du parcours, rouler et équilibrer en plus de se lier à la position géographique absolue;
- corrélation d'erreurs dans la détermination des temps d'arrivée sur les éléments de base en vue de leur connexion cinématique, par exemple, due au tangage
- et, puisqu'un bureau d'études peut généralement fonctionner comme un système goniométrique, il est également sujet au problème de diminution de la précision lors du déplacement d'un objet positionné de la base.
- ( «») .
Ce sont mes types de systèmes préférés. DB - signifie Longue base , pas ce que vous pensiez . Les dimensions des lignes de base sont beaucoup plus grandes que la trajectoire de l'objet positionné et les éléments de base ne sont pas liés cinématiquement entre eux. En règle générale, une base peut être un fond, comme [11] et [12] , lorsque ses éléments sont situés en bas, ou elle peut flotter lorsque les éléments de support sont des bouées équipées de récepteurs GNSS, ici nous pouvons citer des systèmes comme exemples [13 ] et [14] , les systèmes GPS GNSS [15] , GLONASS [16], Galileo [17] , Beidou [18] et certains de leurs prédécesseurs - les systèmes DECA [19], Chaika [20] et LORAN [21].Les systèmes DB offrent une précision maximale dans la détermination de la position d'un objet positionné car la taille importe et sont largement dépourvus de nombreux inconvénients des systèmes UCB et KB, tels que la réduction de la précision lors de l'éloignement de la base - DB fournit en moyenne la même précision à l'intérieur de la base de navigation et lors de la sortie un objet positionné peut continuer à fonctionner comme un système goniométrique.Les systèmes DB sont beaucoup moins sensibles aux erreurs associées à la propagation par trajets multiples, comme indiqué ci-dessous - si le faisceau direct n'est pas correctement déterminé, la différence de temps de parcours peut être faible (unités de mètres), ce qui peut être facilement compensé par la présence de points de référence en excès, dans le pire des cas uniquement une erreur dans la détermination de l'emplacement de l'ordre de la différence de trajectoire du faisceau, tandis que l'UCB pourrait estimer l'angle d'arrivée de ce faisceau, qui peut se révéler être presque n'importe quoi, ce qui à son tour conduit d'une erreur tout à fait inacceptable.Parmi les inconvénients des systèmes DB, les principaux sont la complexité de l'installation, ce qui est particulièrement vrai dans le cas de la base inférieure - premièrement, les éléments inférieurs devraient fournir une autonomie suffisante pour maximiser l'intervalle de temps de service, et deuxièmement, parce que En règle générale, de tels systèmes fonctionnent à des profondeurs considérables (à partir de 500 mètres et plus), puis des exigences supplémentaires sont imposées aux bâtiments normobares. Troisièmement, il y a un problème supplémentaire de retrait de la base à la fin des travaux.Et enfin, après l'installation de la base, l'emplacement de ses éléments doit être déterminé avec une précision géodésique, par exemple, en utilisant la méthode Virtual DB ou des systèmes UCB utilisant une large sélection de mesures.Toutes ces opérations nécessitent un équipement spécialisé et coûteux et la main-d'œuvre de nombreux spécialistes hautement qualifiés.Le cas de la base flottante est beaucoup plus simple. Les bouées de réception, de transmission ou de réception et de transmission hydroacoustiques peuvent être installées à partir de presque toutes les embarcations (nous installons les nôtres en 15 minutes à partir d'un bateau pneumatique à rames), compte tenu de la facilité d'installation et de retrait, les éléments de support peuvent avoir peu d'autonomie et leurs coques peuvent généralement être rendues atmosphériques performance.Il vaut la peine de dire que l'utilisation d'une base flottante est très compliquée lorsque l'on travaille à grande profondeur pour deux raisons: la première est la difficulté d'installer une ancre, qui est en principe résolue par une base flottante motorisée, qui assure la conservation automatique de la position géographique, et la seconde est plus grave, et souvent exclut l'utilisation d'une base flottante lorsque vous travaillez à de grandes profondeurs - la présence d'une réflexion interne totale du signal de la couche de saut (ce qui signifie la couche du saut dans la vitesse du son. La séparation des couches d'eau avec différents densité, à partir de laquelle le son peut être complètement réfléchi).La seule solution ici est de retirer l'antenne hydroacoustique sous la couche de saut, ce qui crée à son tour encore plus de problèmes - la complexité du positionnement topographique de l'antenne hydroacoustique, le poids du câble, une conception très compliquée, et nous voici à nouveau là où nous avons commencé.Traditionnellement, à titre d'exemple visuel, j'apporte notre système RedWAVE DB, des bouées (le plongeur est unique et non inclus dans le package): Et le récepteur de navigation:
Et le récepteur de navigation:
Nous avons plusieurs articles sur ce système. Systèmes virtuels à base longue
Les systèmes basés sur ce qu'on appelle base longue virtuelle [22] [23] [24] (VDB, VLBL anglais - ligne de base longue virtuelle) méritent d’être allouées en tant que groupe distinct pour des raisons de conception et d’agencement.L'essence des systèmes VDB est que les plages inclinées vers le transpondeur ou les heures d'arrivée du signal du pinger sont mesurées à différents points dans l'espace, cette approche est vraie si une condition est remplie: l'objet positionné maintient une position fixe et le point de référence mobile forme des éléments de la base de navigation en effectuant ou en mesurant la distance au défendeur ou en fixant les heures d'arrivée du signal de sonnerie à partir de différentes positions.Cette classe de systèmes de navigation, avec toutes ses limites apparentes, a les perspectives les plus larges: premièrement, elle ne nécessite aucun équipement complexe, comme dans le cas des systèmes UHF - la tâche n'est résolue nominalement qu'avec deux émetteurs-récepteurs ou avec un émetteur et un récepteur, qui ne sont pas requis par quoi ou d'une manière spéciale pour s'orienter dans l'espace. Dans le cas d'un pinger, il est possible d'organiser une recherche coopérative d'un pinger en utilisant un troupeau de véhicules de surface autonomes. Cela est particulièrement vrai dans le cas de la recherche d'objets coulés (par exemple, des avions ou des navires écrasés) dans une zone théoriquement illimitée. En outre, l'une des méthodes pour déterminer initialement l'emplacement des éléments de la base longue inférieure est la méthode WDB.À titre d'exemple, je vais donner notre projet de démonstration (même deux!) D'une longue base virtuelle sur deux micro-modems uWAVE.Le premier projet est décrit dans l'un de nos précédents articles . Là, le modem, le module GNSS et le module radio ont été combinés à l'aide d'une carte sur le STM32.Dans la nouvelle réincarnation de ce projet, le code a été réécrit sur Arduino UNO, et la solution au problème de navigation est effectuée dans une application open source .Systèmes combinés
Les systèmes combinés contiennent généralement des éléments de deux ou plusieurs classes de systèmes. Ainsi, par exemple, il existe des solutions techniques décrites dans la revue [1] combinant une base longue déployable et une base courte montée sur un navire, dont la tâche principale est de positionner les éléments d'une base longue. De toute évidence, le positionnement des éléments d'une base longue peut également être effectué à l'aide de systèmes UKB.En général, on peut affirmer que le choix d'un schéma de synthèse particulier est déterminé, assez curieusement, par le problème résolu.Dans la très grande majorité des cas, la synthèse de différentes classes de systèmes a pour objectif le positionnement initial des points d'appui d'une longue base.Exotique
Ici, nous n'abordons que brièvement certaines classes de systèmes, dès qu'ils sont indirectement et formellement liés au sujet de l'article.Parmi eux, les systèmes acoustiques basés sur le calcul des morts sont construits sur ce qu'on appelle Journaux Doppler, appareils qui mesurent la vitesse d'un objet positionné par rapport au fond en émettant un signal acoustique dans au moins trois rayons étroitement dirigés et leur réception ultérieure. Le déplacement de l'objet par rapport au bas entraîne l'apparition d'un décalage de fréquence Doppler du signal émis détecté à l'étape de réception.Le décalage Doppler est recalculé dans la projection de la vitesse le long de trois axes. En combinaison avec les lectures du capteur de cap (boussole) et les lectures de l'accéléromètre, une séquence de décisions est formée pour l'emplacement de l'objet. L'initiation de cette séquence nécessite un positionnement initial. Ce type de système a principalement des applications militaires compte tenu du secret et de l'autonomie relatifs. Il présente tous les inconvénients des systèmes d'estimation des morts associés à l'accumulation rapide d'erreurs. C'est-à-dire
la précision diminue avec le temps.Il existe toujours exotique-exotique et assez exotique. Au premier, je référerais des systèmes basés sur l'analyse des images de fond ( CARL! ), Et au second, la navigation à travers les fluctuations du champ magnétique ( CARL !!! ). En ce qui concerne l'applicabilité pratique des deux, je tiens, comme on dit, "à exprimer de sérieuses préoccupations".Dans le résidu sec
Ainsi, dans la classification actuelle, il existe trois classes principales de systèmes de navigation par sonar:- , - . , , , . [1] 0.5-0.2% .
- , ( ) , ; , -, , [1] , 0.5% ;
- Ligne de base longue, dans laquelle l'emplacement de l'objet est déterminé par trois plages inclinées (ou différences) ou plus, mesurées sur trois points de référence ou plus largement espacés. Cette classe de systèmes est difficile à utiliser et à entretenir, elle peut être mise en œuvre en deux versions très différentes - le fond et la base flottante, et, selon l'auteur [1], a une précision maximale par rapport aux autres classes de systèmes - environ 0,1% de la profondeur du lieu. Au même endroit, dans la revue Vickery que j'ai déjà effacée, les valeurs absolues de l'erreur de positionnement de l'objet positionné sont rapportées pour les systèmes fonctionnant dans différentes gammes de fréquences - de 2-3 mètres pour les systèmes basse fréquence (jusqu'à 15 kHz), jusqu'à 1 mètre pour les systèmes moyenne fréquence (19-36 kHz) et jusqu'à 5 cm pour les systèmes fonctionnant à des fréquences de 50 à 110 kHz.
PS
Merci beaucoup de votre attention, nous serons heureux d'écouter les critiques constructives et de répondre aux questions.
Si cet article suscitera l'intérêt des lecteurs, alors dans le prochain je prévois de parler de la classification correcte des systèmes de navigation sous-marine.
Si tout se passe bien, alors dans un autre article j'analyserai plusieurs algorithmes pour le fonctionnement des systèmes de navigation avec des exemples de code.
Liste des sources- Vickery, K. (sans date). Systèmes de positionnement acoustique. Un aperçu pratique des systèmes actuels. Actes de l'atelier de 1998 sur les véhicules sous-marins autonomes (Cat. No 98CH36290).
- Diogène Laertius. La vie et les opinions de philosophes éminents par Diogène Laertius (Traduction par Yonge, CD). Londres: George Bell et fils, 1905. Google books. Web 01 avr. 2019.
- Frankland, William B., Le premier livre des éléments d'Euclide: avec un commentaire basé principalement sur celui de Proclus Diadochus. Cambridge: à l'University Press, 1905 .
- Limites de précision des systèmes de multilatération hyperbolique, Harry B. Lee, Massachusetts Institute of Technology, Lincoln Laboratory, note technique 1973-11, 22 mars 1973
- evologics.de/usbl
- www.tritech.co.uk/media/products/usbl-tracking-system-micronnav.pdf
- www.ixblue.com/products/posidonia
- www.ixblue.com/sites/default/files/2018-02/Gaps.pdf
- Intégration du positionnement relatif de précision dans les opérations ROV JASON / MEDEA, Bingham et al., MTS Journal Spring 2006 (Volume 40, Numéro 1)
- waterlinked.imtqy.com/docs/explorer-kit/introduction
- www.ixblue.com/sites/default/files/2019-01/Ramses%20-%20Datasheet.pdf
- evologics.de/web/content/16763?unique=cc5bc295cb0a4bf681a31de24fdb204f62169c2b&download=true
- github.com/ucnl/Docs/blob/master/RU/RedWAVE/RedWAVE_LBL_Deployment_maintenance_RedNAV_ru.pdf
- www.alseamar-alcen.com/sites/alseamar-alcen.com/files/pdf/products/fiche_205x292_gib-sar.pdf
- www.gps.gov/technical/ps/2008-SPS-performance-standard.pdf
- "Le système de navigation mondial GLONASS: développement et utilisation au 21e siècle." 34e réunion annuelle précise sur l'heure et l'intervalle de temps (PTTI). 2002.
- download.esa.int/docs/Galileo_IOV_Launch/Galileo_factsheet_2012.pdf (PDF). ESA 15 février 2013. Récupéré le 8 décembre 2019.
- "Directions 2017: la route de BeiDou vers un service mondial." GPS World. 6 décembre 2016.
- Derek Howse, radar en mer. Macmillan Press, Grande-Bretagne 1993. ISBN 1-55750-704-X
- GOST R 54025-2010 Système de radionavigation "The Seagull". Appareils récepteurs. Exigences pour les spécifications techniques. Méthodes d'essai et résultats d'essai requis
- The Development of Loran-C Navigation and Timing, Gifford Hefley, US National Bureau of Standards, oct. 1972.
- MB Larsen, «Synthetic Long Baseline Navigation of Underwater Vehicles», présenté à la conférence et exposition Oceans 2000 MTS / IEEE, 2000.
- JoÃo Saúde, Antonio Pedro Aguiar, Navigation acoustique par balise unique pour un AUV en présence de courants océaniques inconnus, IFAC Proceedings Volumes, Vol. 42, numéro 18, 2009, pp. 298-303, ISSN 1474-6670, ISBN 9783902661517, doi.org/10.3182/20090916-3-BR-3001.0057 .
- Alexander Dikarev, Stanislav Dmitriev, Vitaliy Kubkin, Andrey Vasilenko. Estimation de la position des capteurs sous-marins autonomes en utilisant la méthode de la ligne de base longue virtuelle, International Journal of Wireless & Mobile Networks (IJWMN), Vol. 11, numéro 2, avril 2019