Salutations, très chers!
"Si, en réponse à la demande d'un ami ou d'un ennemi, il est incorrect de répondre, la deuxième demande viendra déjà à la 533e fréquence " (C)
«Tout cela passe en quelque sorte devant vous. Ou à travers vous. Et pour moi ça marche comme un rouleau compresseur. Pas un seul os n'a été laissé. "(C) A. et B. Strugatsky," City Doomed "
Vous êtes-vous déjà demandé à quoi vous ressembleriez sous l'eau, disons, la boxe ou la marche?
Avant que nous ayons vraiment eu le temps de profiter de tous les charmes de l'Internet des objets,
il était déjà devenu un mot d'ordre lors de l'examen des demandes de subventions scientifiques, alors que des publications scientifiques et non commençaient à apparaître sur la façon de résister aux cyberattaques sur les systèmes de positionnement sonar, et (oh dieux! ) au réseau sous-marin de capteurs autonomes!
Juste quelques paragraphes de suspense technique et je promets de tout expliquer.

Vous allez bien, vous êtes assis de l'autre côté du moniteur et lisez une autre analyse. Et je ressens toujours une fausse honte quand je réponds à la question de ce que je fais. Vous savez, beaucoup ne soupçonnaient même pas que la transmission de données sous l'eau est une sorte de problème. Ou, disons que le GPS ne fonctionne pas sous l'eau.
Que se passe-t-il du tout?
Décrivons immédiatement les conditions. Pour avoir quelque chose sur quoi compter. Maintenant, je vais vous fournir quelques astuces pour estimer «à l'œil nu».
Une
bande de fréquences très
étroite est disponible pour la communication sonar, à peu près - des unités aux dizaines de kilohertz. Le son à différentes fréquences s'estompe de manière inégale.
Si l'on prend la mer "moyenne", le coefficient d'atténuation:
- pour le son avec une fréquence de 1 kHz est d'environ 0,1 dB / km
- pour le son avec une fréquence de 10 kHz - 1 dB / km
- et pour le son avec une fréquence de 100 kHz - impitoyable 10 dB / km.
Qu'est-ce que cela signifie? Cela signifie que si vous travaillez avec un signal à large bande,
différentes parties du spectre se propageront très différemment .
Je suis d'accord, ces décibels me confondent toujours et "grondent la racine du hertz".
Si tout est grandement simplifié, alors la portée de communication moyenne:
- à des fréquences de l'ordre de 1 kHz, il peut atteindre des dizaines de kilomètres (avec un certain pourcentage de chance - des centaines)
- à des fréquences de l'ordre de 10 kHz - 10 kilomètres
- et à des fréquences de l'ordre de centaines de kilohertz - des centaines de mètres, et Dieu nous en préserve si au moins un ne réussit pas.
Une formule très approximative pour estimer la fréquence du signal pour atteindre la plage requise est la suivante:
$$ affichage $$ kHz = 40 / km ^ {2/3} $$ affichage $$
Ou, si vous avez besoin de déterminer quelle plage théoriquement un signal d'une fréquence donnée fournira:
$$ afficher $$ km = (40 / kHz) ^ {3/2} $$ afficher $$
Dans la plage de 1 à 100 kHz, la formule est plus ou moins vraie.
À des fréquences de l'ordre de 20 kHz, une portée de communication de 2 à 3 km peut être attendue et à des fréquences de l'ordre de 100 kHz à 300 mètres. De telles choses.
Les bruits provenant de toutes les grandes pièces métalliques sont généralement de basse fréquence et se propagent sur de grandes distances.
Si nous voulons transmettre des données numériques, alors à partir des considérations humanistes les plus générales, avec un certain optimisme, nous pouvons modestement espérer une vitesse de transmission de 5 kbps par bande de 10 kHz, à condition que la largeur de bande du signal soit supérieure à 10 kilohertz.
La vitesse du son est en moyenne de 1 500 m / s. Cela signifie que pour chaque kilomètre et demi de portée, le retard associé à la vitesse de propagation du signal augmentera de 1 seconde.
Donnons un sens à ces quantités. Si nous transférons conditionnellement une sorte de demande pour, disons,
10 kilomètres , nous pouvons accepter la réponse au plus tôt
14 secondes . Dans l'une des expériences, un signal de réponse était attendu pendant plus de deux minutes et demie, car l'abonné était à une distance de 120 kilomètres.
Je n'évoque même plus les problèmes liés au fait que la vitesse du son dépend fortement de la densité de l'eau. Les couches d'eau de densités différentes ne se mélangent pas dans les mers et le son peut être complètement réfléchi par la limite de deux couches, c'est-à-dire quelque part, le signal n'ira tout simplement pas là où il est nécessaire. Sans aucun obstacle visible.
Bruit, Multipath et Doppler. Toutes les mers, océans et rivières sont bruyants. Particulièrement puissant à des fréquences inférieures à 10 kHz. Le son est réfléchi par le bas, les détails du paysage sous-marin, la surface, les réflexions s'additionnent au point de réception, la trajectoire des vagues se plie sous l'effet de la réfraction. Les modems hydroacoustiques peuvent rester en contact pendant des kilomètres, mais ne s'entendent pas à travers une couche dense d'herbes marines, à un mètre les uns des autres.
C’est bien si nous essayons de travailler en haute mer. Par exemple, la profondeur est d'un kilomètre, la distance est de 10, dans des proportions qui ressemblent à un bain. Ci-dessous, dans l'image de Wikipedia, le lancer de rayons est visible:

Mais qu'en est-il d'un plan d'eau peu profond? L'été dernier, des collègues ont travaillé à une distance de 800 mètres avec une profondeur de 4 mètres. Géométriquement - c'est une flaque d'eau sur le trottoir. Rapport distance / profondeur 200: 1. Imaginez combien de fois le son rebondira sur le fond et comment il se formera au point de réception.
Tout cela conduit au fait que le canal de communication hydroacoustique est très complexe et très instable.
Réseaux de capteurs?
L'expression sur le devoir sonne quelque chose comme ça 95% de l'océan entier nous est inconnu. Il est très tentant de placer des «nœuds» en bas (ou même dans la colonne d'eau) qui mesurent certains paramètres environnementaux, les accumulent et, si nécessaire, les transfèrent quelque part le long de la chaîne. Par exemple - sur un navire scientifique
militaire passant au-dessus d'eux.
La consommation électrique moyenne réaliste de ces pièces dans un mode de transmission de 5 à 15 watts. Même si nous supposons que l'appareil passe la plupart du temps dans un rêve comme un chat noble, en fonction de la vitesse de transmission et de la fréquence approximative des sessions de communication, il devient assez évident qu'avec une autonomie raisonnable, la plupart de cet appareil sera la batterie . Quelques dizaines de kilogrammes de lithium, dont la plupart ne seront jamais soulevés par le bas, car ils seront lavés avec des boues, ils repousseront avec des coquilles, pourriront et, en général, ils sont "économiquement désavantageux".
N'oubliez pas qu'une telle chose ne peut tout simplement pas fonctionner tout le temps, ou au moins souvent, comme un nid d'abeilles ou un routeur Wi-Fi domestique, bien qu'elle se trouve complètement sans défense au fond et ne soit en aucun cas gardée.
Ici, je devrais donner un exemple d'un tel réseau de capteurs. Eh bien, les voici:
Tous ces réseaux de test sont, pour ainsi dire, dans l'accessibilité "aviron" de la côte. Tous appartiennent au projet européen
FP7-SUNRISE .
Ci-dessous, un diagramme du site Web du projet illustrant les emplacements et les fonctions des différents laboratoires et sites d'essai:

Le succès du projet est difficile à évaluer.
De nombreux articles ont été publiés .
Le budget total est de
5 320 023 euros . Parmi les méditants se trouvent de nombreuses universités européennes, le centre belge pour la science et la technologie de l'OTAN.
État du projet -
Clôturé le 31 décembre 2016 .
Il existe de nombreux petits réseaux de test différents, qui sont pour la plupart des événements ponctuels. Voici un couple qui a attiré mon attention:
Les principaux problèmes, me semble-t-il, sont que pour l'utilisation réelle de telles pièces avec une charge utile, vous devez amener la technologie à un état tel que les nœuds du réseau sont prêts pour le vol spatial à longue distance, ni plus ni moins - jetés à l'eau - et dit mentalement au revoir. Tout problème compliqué avec les batteries et l'entretien prive l'idée de sens du tout.
Une autre chose est différents planeurs!
La force motrice de tous ces projets est illustrée sur une image du site Web de la fille de Boeing, Liquid robotics:
Belle vidéo sur ce qu'est le Wave-glider et comment il fonctionne:
Qu'est-ce qu'un planeur et comment ça marche:
Si le premier a une plate-forme de surface, qui est visible, alors le second peut plonger sur les mers et les océans pendant des semaines et des mois
(plus d'un an!) , Rarement, rarement surfer sur la surface.
La conversion et la mise en œuvre des technologies de défense n'ont pas été annulées, bien sûr, nous pouvons l'espérer. Dans tous les cas, les planeurs et les planeurs de vagues - c'est à grande échelle, c'est sérieux et pendant longtemps.
Mais l'essentiel est ...... que tout va à la confrontation des véhicules autonomes estampillés par convoyeur d'une part et des sous-marins nucléaires de l'autre, à la seule différence que dans le cas de ces derniers, le lancement de chacun de ces "premiers parmi ses pairs" est célébré comme un jour férié. Eh bien, au diable avec un morceau de fer, seulement dans chacun d'eux il y a des dizaines de sous-mariniers vivants hautement qualifiés.
Et la marche sous-marine et la boxe?
Semblables aux drones aériens, les sous-marins ne sont pas non plus opposés à comprendre où ils se trouvent, il serait également agréable de pouvoir rester en contact avec eux, même lorsque les choses sont immergées.
Ces dernières années, il y a simplement eu un tas de publications sur le thème de la lutte contre certaines cyberattaques éphémères contre les réseaux de capteurs sous-marins et les systèmes de positionnement sous-marins.
La friandise pour les auteurs de ces articles est l'usurpation d'identité, comment le définir et comment y faire face.
Il semblerait que la question soit extrêmement simple - il suffit de prendre un modèle des systèmes de navigation par satellite, de changer la vitesse de la lumière en vitesse du son, et ici cela semble être un tout nouveau domaine de la science et de la technologie.
Voyons sur quelles hypothèses tout cela est basé.
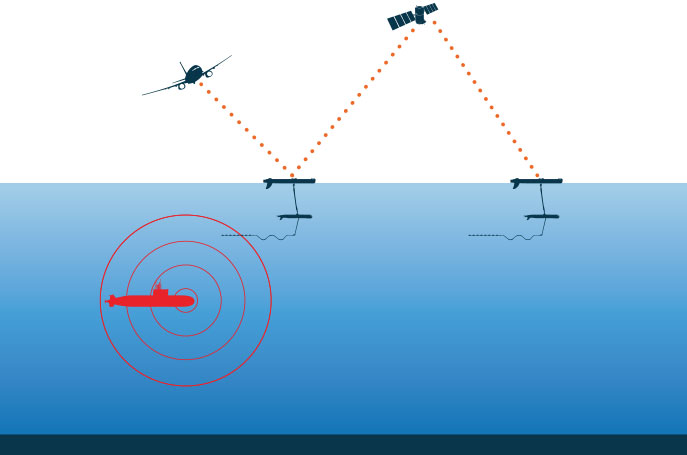
On distingue généralement deux types de spoofers: ceux qui sont à la surface de l'eau et ceux qui sont dans la colonne d'eau. Les premiers déterminent leurs propres coordonnées à l'aide du GNSS, et les seconds à l'aide du système de navigation par sonar, auxquels ils doivent faire face.
Dans les publications, en général, nous parlons d'une sorte de système de navigation hydro-acoustique à longue portée qui doit être compromis. Mais j'ai promis des mythes et de la réalité, nous analyserons donc tous les principaux types de systèmes de navigation par sonar et comment ils peuvent ou ne peuvent pas être surmontés, même ceux qui ne sont clairement pas adaptés au positionnement de nœuds du réseau sous-marin, ni mobiles ni stationnaires. Nous supposons que l'attaquant connaît tous les algorithmes de modulation et de démodulation des signaux, tous les retards et timings du système, les fréquences, les encodages et les moindres détails.
Alors.
Systèmes télémètres et goniomètres
Ce sont ceux dans lesquels l'angle et la distance au point souhaité sont mesurés pour résoudre le problème de navigation.
Il peut y avoir plusieurs options pour le fonctionnement d'un tel système.
Du point de vue de l'emplacement de l'antenne radiogoniométrique:
- Accueil chez la victime mobile
- Transmission sur une balise d'entraînement fixe. L'antenne doit dans ce cas être orientée par rapport aux points cardinaux d'une manière connue de la victime mobile.
Du point de vue de la méthode de détermination de la distance:
- Méthode de demande-réponse
- Par pré-synchronisation, la balise du lecteur émetteur
- Démarrage de "request-response" pour la synchronisation, puis émission périodique d'une balise de lecteur
Si la méthode demande-réponse est utilisée, la seule option pour l'usurpation d'identité est d'être plus proche de la victime que de la balise de lecteur. Tout est très simple ici - le signal de navigation a en moyenne une durée tangible, et enfin et surtout, la durée exprimée en distance (fois la vitesse du son).
Nous parlons de dizaines et de centaines de millisecondes, c'est-à-dire environ des dizaines et des centaines de mètres. Le spoofer doit recevoir le signal de demande de balise et émettre une réponse, simulant le retard requis afin de former l'image de la victime du spoofer à quelle distance il est de la balise de lecteur.
Il est
impossible de modifier l'angle d'arrivée du signal, car il est évalué objectivement par la victime. Tout ce que le spuffer peut faire dans cette situation est de changer physiquement l'angle - juste être du côté droit de la victime.
De plus, le spoofer ne doit pas permettre une situation où son "faux" signal chevauche le signal réel de la balise de commande sur la victime - dans ce cas, avec une probabilité très élevée, la victime ne recevra aucun signal du tout.
Alors que le schéma est mince et, en théorie, même dangereux. Pourquoi est-il complètement inopérant - un peu plus tard.
Si la méthode de pré-synchronisation est utilisée, le spoofer, d'une part, a une certaine marge d'action - il n'est pas nécessaire d'être plus proche de la victime que la balise de lecteur, vous pouvez simplement vous faufiler dans la transmission périodique entre les signaux de la balise.
D'un autre côté, il est plus connecté par la période d'émission de la balise d'entraînement - il se peut que le signal de remplacement ne rentre tout simplement pas dans l'espace entre les vrais.
L'option avec synchronisation primaire par la méthode de demande-réponse et la transmission ultérieure de la balise d'entraînement donne à nouveau plus de possibilités au spoofer s'il peut faire une substitution au moment de la synchronisation primaire.
L'option avec une antenne à réseau phasé rayonnant sur une balise d'entraînement est encore plus dangereuse pour la victime. S'il était impossible dans les cas précédents de modifier l'angle d'arrivée du signal, alors dans cette configuration, en modifiant les retards de rayonnement entre les différents éléments du réseau d'antennes phasé, tout angle souhaité peut se former dans la «conscience de la victime».
Tout semble assez logique et très facile à craquer pour cet appât.
Mais en fait, toutes les méthodes que j'ai décrites ci-dessus sont également complètement inopérantes. N'oubliez pas cela pour l'instant.
Systèmes télémètres
Ici, dans la grande majorité des cas, il existe des points de référence répartis sur la surface ou le fond, dont les coordonnées sont connues à l'avance par la victime ou transmises en permanence par ces points de référence. Encore une fois, il peut y avoir toutes les options précédentes pour déterminer la plage - "demande-réponse", pré-synchronisation, etc.
Tout ici est très similaire à un système de goniomètre, à la seule différence que le spoofer doit être le plus proche de toutes les personnes impliquées dans le processus des points de contrôle. Il prend le signal de demande de la victime de la même manière, remplace, si nécessaire, les coordonnées du point de référence actuel (rappel, le spuffer connaît tous les schémas de modulation-démodulation et les formats de colis!), Forme les délais requis dans la mesure du possible. De toute évidence, dans ce cas, de sérieuses restrictions sont imposées sur l'emplacement du spuffer - il doit être plus proche que tous les points de référence, et même les retards ne peuvent pas être trop importants - il existe un risque de chevauchement d'un signal d'échange et réel sur la victime.
Et ce schéma peut également difficilement être utilisé.
Systèmes de télémètre de différence
Presque complètement similaire aux précédents - les points de référence sont situés à la surface de l'eau ou au fond, mais maintenant la victime ne rayonne plus, mais écoute seulement. Le fonctionnement de ces systèmes répète complètement l'idéologie GNSS - les deux satellites transmettent leurs emplacements et les points de référence du système de positionnement hydroacoustique transmettent leurs emplacements en fonction de l'horloge, synchronisés avec tous les autres points de référence.
Habituellement, pour une raison quelconque, ce système est considéré comme le plus sensible aux attaques d'usurpation. Très probablement parce que son travail est basé sur presque les mêmes équations que les systèmes GNSS.
Donc, ici tout se passe selon la même idée qu'en étant plus proche de la victime que des points de référence réels, le spoofer envoie un signal de remplacement pour qu'il arrive à la victime avant les signaux réels. Parce que Étant donné que les moments absolus de rayonnement ne jouent aucun rôle, le spoofer peut transmettre des signaux beaucoup plus tôt que les points de référence. Seules les différences dans les heures d'arrivée des signaux à la victime sont importantes.
Conclusion
Les trois classes de systèmes semblent à première vue sensibles aux attaques par usurpation d'identité, quel est le problème avec ces arguments?
En fait, tout est très simple: la vitesse de propagation du signal sensiblement faible joue un tour au spoofer. Afin de remplacer quelque chose là-bas, vous devez connaître très précisément non seulement votre emplacement et l'emplacement des points de contrôle ou de la balise d'entraînement, vous devez connaître l'emplacement de la victime!
Heck, pour résoudre un problème de navigation, vous devez d'abord résoudre un problème de navigation au moins trois fois!
Ce spoofer aéroporté sait où vole le «libérateur» et peut le nourrir avec des données GNSS usurpées. Sous l'eau, cela ne peut se faire que dans le champ de vision, c'est-à-dire quelques mètres, peut-être une douzaine dans le cas le plus optimiste.
Mais les auteurs de ces publications ont-ils vraiment manqué un détail aussi simple?
Bien sûr que non. Je pense qu'ils comprennent tout parfaitement. Dans la partie des publications (principalement sur les réseaux de capteurs sous-marins), cette question n'est pas du tout posée, dans d'autres, il est proposé de déterminer la localisation de la victime dans des articles ... par sonar!
Et dans le cas d'un spoofer dans la colonne d'eau, qui lui-même ne sait pas où il se trouve (un système de goniomètre d'entraînement, par exemple, ne l'aidera en aucune façon - c'est pour pouvoir y accéder, et ne pas comprendre sa position absolue).
S'il s'agit d'un spoofer de surface, alors il doit abaisser l'antenne à une profondeur suffisante, s'il veut déterminer l'emplacement de la victime avec un sonar passif ou actif, alors l'orientation du sonar, suspendu à un câble flexible sur plusieurs dizaines de mètres, doit également pouvoir suivre avec une précision inaccessible.
Inutile de dire que la précision de l'écholocation horizontale n'est en principe pas suffisante pour une usurpation adéquate (ne se transformant pas en brouillage!), Ou qu'elle (comme l'usurpation d'identité en elle-même!) Est simplement enchanteresse sous l'eau? Et peut-être que la seule option est quand le spuffer saura exactement où se trouve la victime - quand il sera physiquement avec elle, comme un poisson collé avec un requin baleine.Quel est le résultat le plus probable, compte tenu de ce que j'ai écrit sur la portée de communication et toutes les conditions de fonctionnement des nœuds et planeurs du réseau sous-marin?- Si c'est proche (centaines de mètres - unités de kilomètres), alors ils nageront simplement jusqu'à celui qui met le spoofer sur un bateau et demandera une explication
- Si c'est loin (des dizaines de kilomètres), alors les clics non autorisés (et dénués de sens!) Du sonar peuvent facilement répondre à la "533ème fréquence".
Émettent activement sous l'eau - c'est comme conduire la nuit dans une voiture avec l'éclairage intérieur allumé - du moins, imprudemment.Je ne dis même pas que l'hydroacoustique est encore acoustique, les signaux ne nécessitent pas d'équipement d'enregistrement sophistiqué, tout est visible sur le spectre, et s'il est conçu pour de longues distances et à basses fréquences, il est juste audible.Par conséquent, il s'avère que la boxe, efficace dans l'air - usurpation GNSS, s'avère plutôt maladroite et dénuée de sens dans un environnement aquatique.Tout ce qui fonctionne vraiment contre l'acoustique - brouillage, brouillage et encore brouillage, plus il est puissant - plus les chances sont grandes. Eh bien, ou simplement nager et ramasser avec un ottertkoy =)PS
Je ne propose délibérément pas de liens vers des publications, ceux qui sont intéressés peuvent facilement trouver des articles sur les mots «usurpation acoustique sous-marine».Traditionnellement, je serai reconnaissant pour les critiques constructives, les messages d'erreur, les suggestions et les suggestions!