En 1495, Léonard de Vinci a créé un dessin d'armure vivante. Et ce n'est qu'après 425 ans que l'écrivain tchèque de science-fiction Karel Čapek a utilisé pour la première fois le mot «robot» dans sa pièce «RUR». Les robots modernes sont beaucoup plus intelligents, plus complexes et plus mobiles que le robot da Vinci, mais ils ont des caractéristiques communes. L'un d'eux est le matériau à partir duquel ces machines étonnantes sont fabriquées. Lorsque nous parlons de robots, nous imaginons le plus souvent quelque chose de synthétique, non sans raison dans les livres et les films de robots appelés parfois synthétiques.
Cependant, les robots peuvent être créés non seulement à partir de métal, de plastique ou de fibre de carbone. Des scientifiques de l'Université du Vermont (USA) ont décidé d'utiliser des cages à grenouilles comme matériaux de construction. Les robots microscopiques qui en résultent, appelés «xénobots», sont capables de voyager à travers le corps d'un organisme vivant et d'effectuer leurs tâches. Comment les scientifiques ont-ils créé la vie artificielle, de quels talents les xénobots peuvent-ils se vanter et où peut-on appliquer une invention aussi inhabituelle? Nous en apprenons à travers le rapport du groupe de recherche. Allons-y.
Base d'étude
Créer un mécanisme qui exécutera certaines tâches sous le contrôle de l'intelligence artificielle n'est plus si difficile de nos jours. Il n'est pas difficile de reconstruire l'organisme existant en changeant sa structure, ses fonctions ou ses caractéristiques. Cependant, créer de la vie à partir de zéro n'est pas une tâche facile. Les chercheurs de l'Université du Vermont disent que les matériaux synthétiques sont utilisés en robotique en grande partie en raison de la simplicité de leur fabrication, de leur mise en œuvre et de leur intégration. Le métal dit exagéré peut toujours être fondu, reforgé ou affûté. Mais les organismes vivants, les tissus et les cellules, c'est-à-dire les systèmes vivants démontrent la stabilité de la structure et des fonctions. Ils sont très résistants aux interférences extérieures visant à modifier leur comportement.
Dans le même temps, les cellules vivantes, en particulier celles embryonnaires, présentent des caractéristiques étonnantes dont même les robots synthétiques les plus développés ne peuvent se vanter. Les cellules embryonnaires sont capables de s'auto-organiser, réalisant les processus de développement et de régénération des tissus, selon la situation. Les manipulations avec cette capacité peuvent permettre la création d'une morphologie synthétique à travers laquelle de nouvelles formes de vie peuvent être réalisées, quelle que soit la sonorité. De plus, le processus d'auto-organisation cellulaire peut être supervisé, fournissant ainsi à la future structure les fonctions et les caractéristiques nécessaires.
À l'heure actuelle, il existe déjà plusieurs méthodes pour développer et créer des systèmes de vie individuels. Par exemple, les organismes unicellulaires peuvent être modifiés au moyen de génomes refactorisés (transformés), mais cela n'est pas encore possible à mettre en œuvre dans des systèmes multicellulaires.
Vous pouvez également modifier le brin cellulaire en changeant les conditions de culture. Mais dans ce cas, le contrôle sur les processus et sur la structure et les fonctions sera minime. En revanche, il y a des développements dans le domaine de la bio-ingénierie, où les cadres tridimensionnels sont étudiés. Cette option vous donnera plus de contrôle. Mais l'incapacité de prédire le comportement d'une structure biologique arbitraire limite cette technique à l'assemblage de machines biologiques basées sur celles existantes. En d'autres termes, ce sera la même modification de ce qui existe déjà, mais pas la création d'un nouvel organisme vivant.
Malgré toutes les difficultés et les obstacles, il existe des moyens. L'un d'eux est la recherche informatique associée à l'impression tridimensionnelle. Contrairement à l'apprentissage automatique, la recherche est un processus évolutif qui vous permet de concevoir la structure physique d'une machine et son comportement à partir de zéro. De plus, cette méthode n'est liée à aucun type spécifique de la structure en cours de création ni à aucune fonction spécifique. Le même algorithme évolutif peut être utilisé pour développer différents systèmes: médicaments, métamatériaux et même machines autonomes.
Dans notre étude d'aujourd'hui, les scientifiques ont démontré une approche évolutive de la conception de systèmes vivants à l'aide d'un algorithme évolutif.
 Image n ° 1
Image n ° 1La nouvelle méthode est organisée comme un convoyeur linéaire, qui prend en entrée la description des blocs de construction biologiques utilisés et le comportement souhaité que le système fabriqué doit démontrer. Le convoyeur affiche en permanence des systèmes de vie sains qui mettent en œuvre le comportement spécifié de différentes manières. Les systèmes vivants qui en résultent sont de nouvelles collections de cellules qui ont très peu à voir avec les organes ou organismes existants.
Résultats de recherche
Le convoyeur est organisé comme une séquence de générateurs et de filtres. Le premier générateur est un algorithme évolutif qui découvre différentes façons de combiner des éléments biologiques pour réaliser le comportement souhaité. Pour commencer, une population de variantes aléatoires des futurs modèles de système est créée. Chaque modèle est ensuite recréé dans un environnement virtuel, après quoi une note de performance est automatiquement attribuée. Les modèles moins productifs sont supprimés et remplacés par des copies accidentellement modifiées de modèles plus productifs. La répétition de ce processus conduit à la formation de populations de schémas divers et non répétitifs.
Processus de conception de présentation vidéo d'organismes reconfigurables.Comme il existe probablement de nombreuses différences entre le support physique simulé et le support physique cible, les modèles efficaces sont passés à travers un filtre de stabilité (fiabilité) qui ne laisse passer que ceux qui prennent en charge le comportement souhaité malgré le bruit (changements dans l'environnement).
Les modèles résistants au bruit survivants sont ensuite passés à travers un filtre d'assemblage, qui supprime les modèles qui ne conviennent pas à la méthode d'assemblage actuelle ou qui ne peuvent pas évoluer vers des tâches plus complexes à l'avenir. La fabricabilité dépend de la taille minimale de la concavité, qui sera préservée dans des grappes de cellules souches en développement, qui tendent à combler de petites lacunes dans leur géométrie générale. L'évolutivité du modèle dépend de sa part de tissu passif, qui offre un espace pour les futurs systèmes d'organes ou charges utiles (c'est-à-dire, un espace pour contenir une substance transportable, comme un médicament).
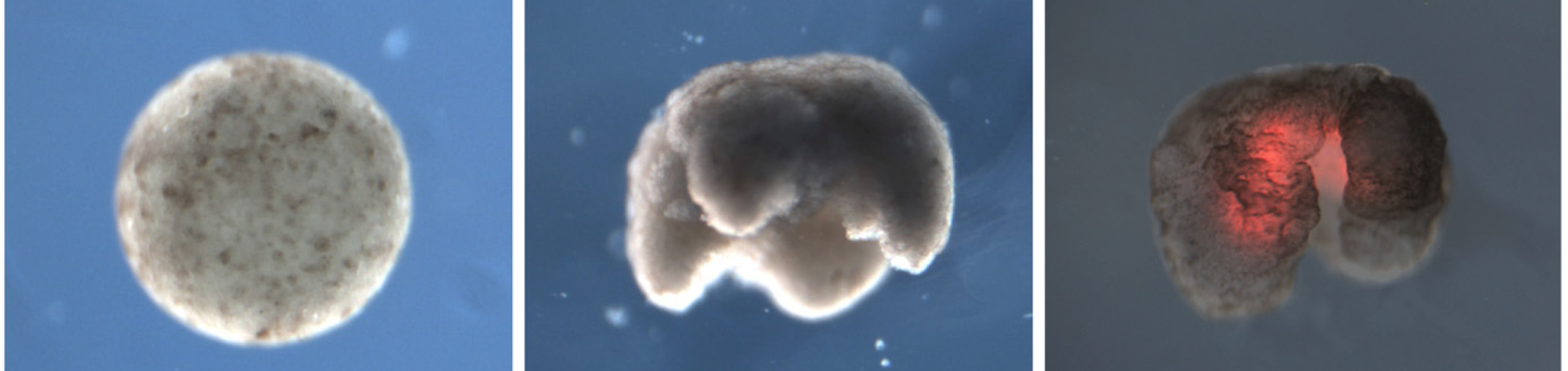
 Xenopus laevis
Xenopus laevisLes modèles qui passent avec succès à travers le filtre d'assemblage sont ensuite formés à partir de tissus vivants.
Les cellules souches
pluripotentes * sont d'abord récoltées à partir d'embryons
Xenopus laevis (grenouille à éperon lisse) au stade blastula, puis dissociées et combinées pour obtenir le nombre de cellules souhaité.
Les cellules pluripotentes * sont capables de se différencier (se transformer) en tous types de cellules, à l'exception des cellules des organes extra-germinaux.
Après la période d'incubation, le tissu agrégé est formé manuellement par soustraction en utilisant une combinaison de pinces pour la microchirurgie et une électrode de cautérisation avec une aiguille de 13 μm.
De plus, le tissu contractile est superposé sur le corps en introduisant des cellules progénitrices du cœur de grenouille, qui se développent naturellement en cardiomyocytes (muscle cardiaque). Ces cellules vont créer des ondes contractiles à certains endroits de l'organisme créé.
Le résultat de toutes ces manipulations a été une représentation tridimensionnelle en direct du modèle, qui a la capacité de se déplacer indépendamment dans le milieu aquatique pendant plusieurs jours et même des semaines sans nutriments supplémentaires.
La présentation vidéo est le processus de création d'organismes reconfigurables.Les organismes résultants sont ensuite introduits dans l'environnement physique réel pour surveiller leur comportement.
Ensuite, les scientifiques ont comparé les observations avec les résultats de la modélisation pour identifier le fait de la transition du comportement de «synthétique» à «organique».
Un aspect important de la technique est la poursuite de l'algorithme évolutif même après l'introduction d'organismes prêts à l'emploi dans l'environnement. Certains d'entre eux, malgré leur utilité au stade du développement, peuvent ne pas afficher le comportement exact attendu. Ces modèles d'organismes sont supprimés de l'algorithme, ce qui conduit à la création de la prochaine fois des organismes plus stables et respectueux de l'environnement.
Ainsi, 4 parcours du convoyeur ont été effectués. Il en a résulté 4 types d'organismes présentant les caractéristiques suivantes: locomotion, manipulation d'objets, transfert d'objets et comportement collectif. Parlons maintenant davantage de chacune des fonctionnalités.
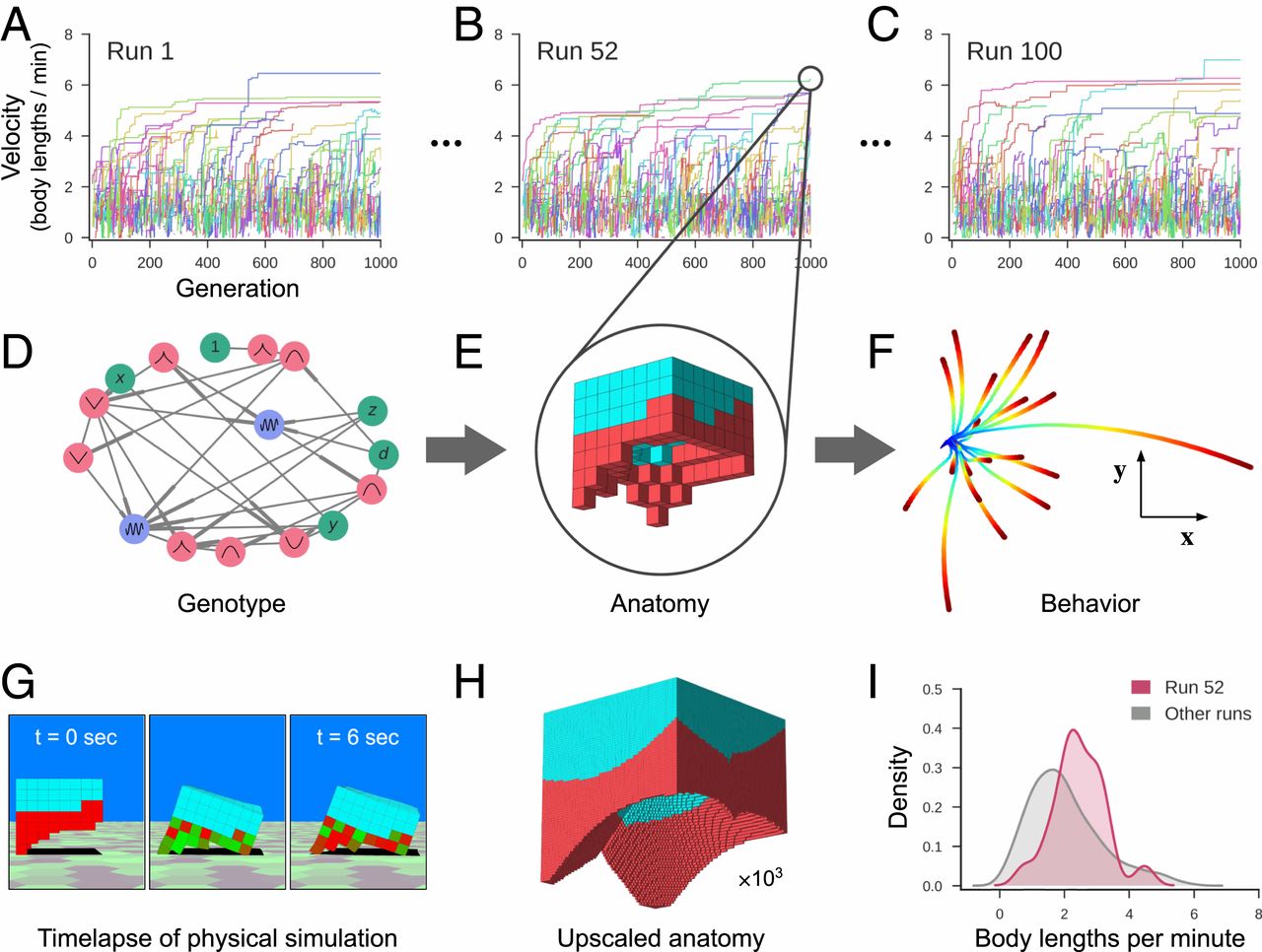 Image n ° 2
Image n ° 2Pour obtenir un ensemble diversifié de modèles, 100 tests indépendants de l'algorithme évolutif (
2A -
2C ) ont été effectués, chacun commençant par un ensemble différent de modèles aléatoires initiaux. Au cours de chaque essai, les modèles ont été sélectionnés sur la base du déplacement net (déplacement) atteint sur une période de 10 secondes (avec une contraction aléatoire, modulée en phase, cyclique à 2 Hz). Au cours de chaque test, des paramètres de sélection supplémentaires ont été appliqués sous forme de stimulation de la compétition à l'intérieur et entre des lignées génétiques uniques, ce qui a conduit à la formation d'une dynamique environnementale unique. À la fin de chaque essai, les modèles les plus appropriés ont été retirés (
1A ) et passés à travers des filtres de stabilité et des assemblages. Au cours de ce filtrage, ces modèles ont été sélectionnés qui conservaient une locomotion rapide pendant la mise à l'échelle et la construction (image n ° 3).
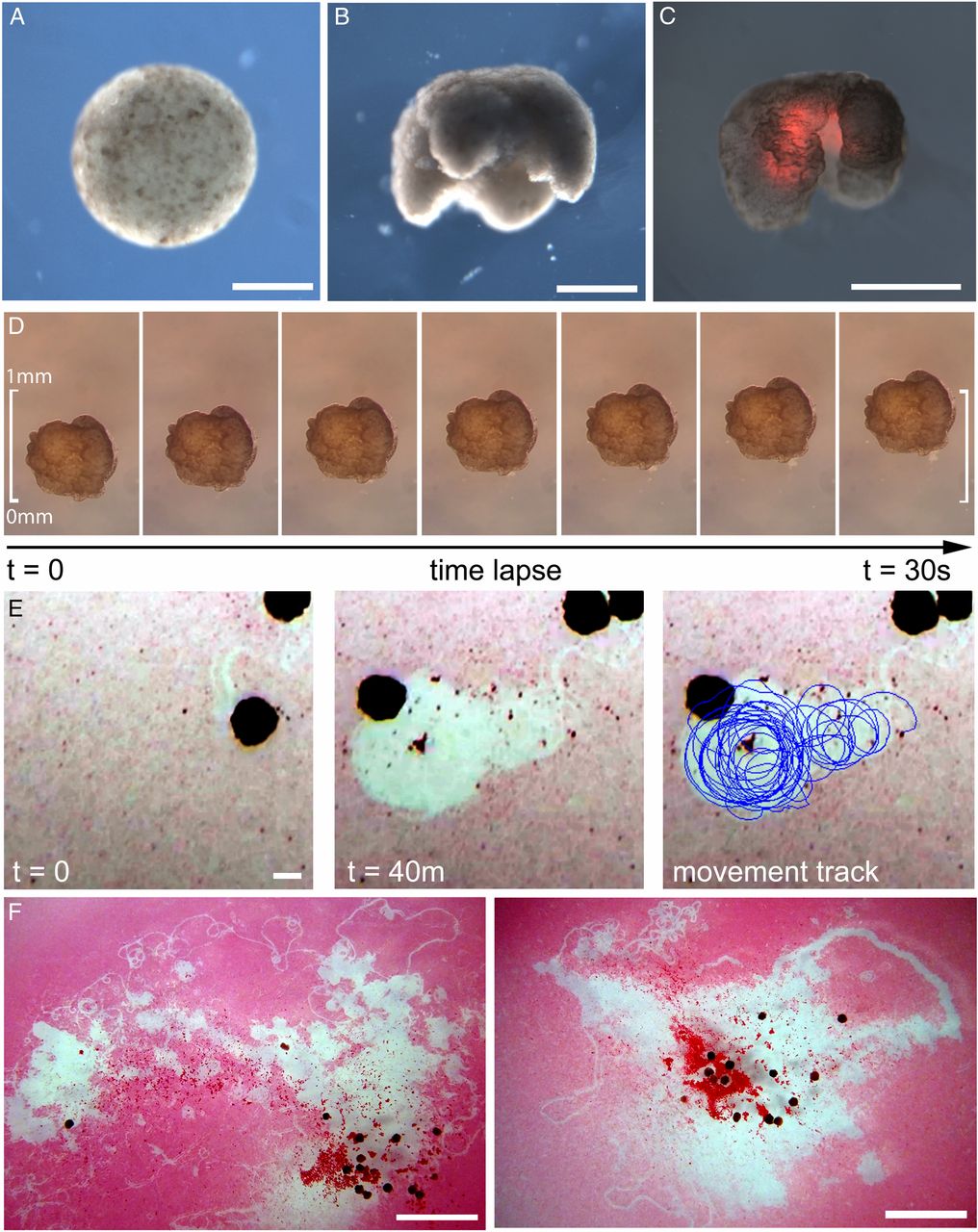 Image n ° 3
Image n ° 3Il convient de noter que les cils (cils, poils fins à la surface des cellules) n'ont pas été modélisés au cours du processus de conception et ont été supprimés lors des tests pratiques par microinjection embryonnaire d'ARNm transcrivant le domaine intracellulaire Notch. Ainsi, tous les mouvements des organismes ont été effectués exclusivement par la réduction du tissu musculaire cardiaque.
Les trajectoires des organismes décylés simulés et réalisés (sans cils) ont été comparées selon deux orientations: verticale et inversée, c'est-à-dire inversé à 180 ° par rapport au plan transversal. Les observations ont montré qu'au moins une des variantes des modèles du corps a réussi à réaliser le comportement donné dans une orientation verticale, mais pas inversée (image n ° 4).
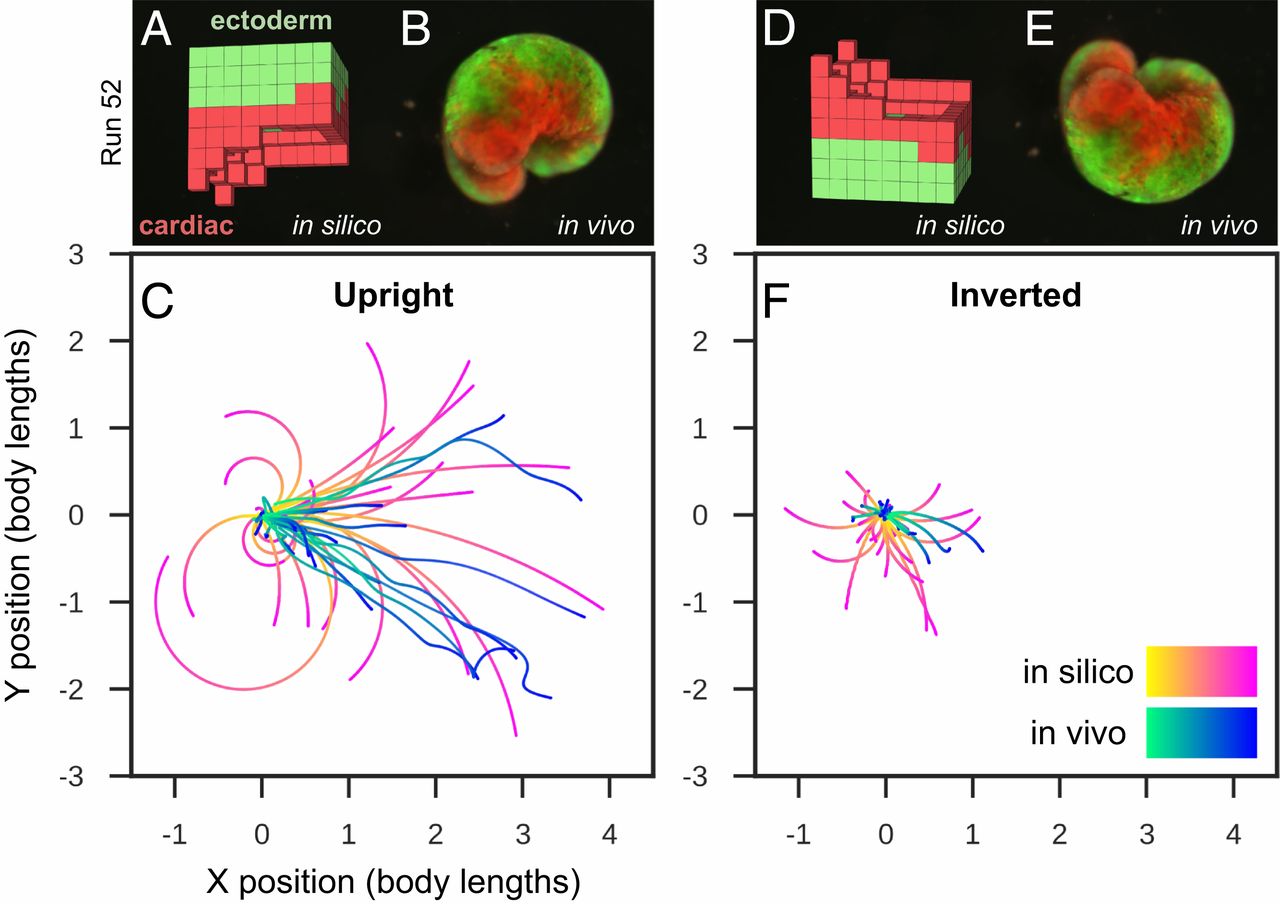 Image n ° 4
Image n ° 4La direction du mouvement des organismes à orientation verticale coïncidait avec la direction du modèle sous perturbations aléatoires. Cela suggère qu'un mouvement réussi dans l'espace n'est pas aléatoire, mais est le résultat de la conception du modèle de l'organisme lui-même.
La deuxième caractéristique est la manipulation d'objets. Lorsqu'il y avait des particules solides dans l'environnement des organismes d'essai, les premiers ont commencé à se combiner spontanément avec eux, à la fois dans la modélisation et dans la pratique (
3F ).
Ce comportement peut difficilement être qualifié de structuré, car les paramètres de tâche nécessaires n'ont pas été définis. Cela peut être réalisé avec plus de précision en ajoutant des données plus précises: par exemple, indiquez la zone qui doit être nettoyée des particules ou indiquez un type spécifique de particules qui doivent être enlevées, tout en ignorant toutes les autres. Le deuxième comportement a été implémenté, mais jusqu'à présent à un niveau primitif.
À l'étape suivante, des organismes montrant la capacité de transporter des objets ont été testés. Certains organismes ont été conçus pour réduire la traînée hydrodynamique à travers un trou au centre de leur plan transversal. Cependant, il n'y avait pas de tissus contractiles dans cette zone du corps.
Ce trou pendant les cycles suivants de l'algorithme évolutif peut être transformé en une sorte de sac pour transférer des objets, qui peut être utilisé pour une distribution localisée de médicaments.
Une autre caractéristique est le comportement collectif. Au cours de la mise en œuvre pratique, une collision de deux organismes a été observée, conduisant à la formation d'une connexion mécanique temporaire. Ces deux organismes commencent à tourner l'un autour de l'autre, et après quelques révolutions, ils se séparent à nouveau le long des trajectoires tangentielles. Un tel comportement sera beaucoup plus prononcé si vous ne supprimez pas le développement des cils, car ils conduisent à un "enchevêtrement" des deux organismes l'un avec l'autre, c'est-à-dire leur connexion devient beaucoup plus longue.
Pour une connaissance plus détaillée des nuances de l'étude, je vous recommande de consulter le
rapport des scientifiques et
les documents supplémentaires qui s'y rapportent.
Épilogue
Cette étude n'est pas difficile à qualifier d'unique, compte tenu de ses résultats. Les scientifiques ont pris des cellules de grenouille et en ont créé de nouveaux organismes multicellulaires qui remplissent des fonctions spécifiées à divers degrés de succès. Même les auteurs de ce travail comprennent que beaucoup sont effrayés par la perspective de robots autonomes, quelque peu pensifs, sans parler de nouvelles formes de vie. Cependant, à leur avis, cette étude permet une meilleure compréhension de la vie elle-même en tant que phénomène. De plus, les xénobots développés peuvent servir en médecine, devenir des nano-chirurgiens vivants, éliminer les cellules nocives et pathogènes du corps du patient, ou nano-messagers de médicaments, en les livrant directement là où ils combattront le plus efficacement la maladie.
La vie sous toutes ses formes et manifestations est impeccable, malgré toutes les lacunes. Chaque créature vivante a évolué pour s'adapter aux conditions de vie changeantes. La science moderne est capable de créer la vie, mais seulement dans le cadre de l'évolution des organismes existants. Mais créer quelque chose de nouveau à partir de zéro est une tâche complètement différente, plus difficile, plus ambitieuse. Il existe des exemples d'organismes créés artificiellement, mais ils ne peuvent être comparés à ceux décrits par les auteurs de science-fiction. Malgré cela, les scientifiques du monde entier n'arrêtent pas leurs recherches, espérant créer une nouvelle forme de vie. Il est encore difficile de dire à quel point il est dangereux de jouer avec la nature. Cependant, selon les auteurs de science-fiction, de telles découvertes ne se concrétiseront pas. Néanmoins, les œuvres de littérature de science-fiction, bien qu’elles prédisent à bien des égards l’avenir de la société en général et de la science en particulier, ne sont que le fruit de l’imagination de l’auteur. La façon dont les technologies actuellement développées, y compris les xénobots, seront utilisées, dépend uniquement de nous-mêmes.
Merci de votre attention, restez curieux et passez un bon week-end à tous, les gars! :)
Un peu de publicité :)
Merci de rester avec nous. Aimez-vous nos articles? Vous voulez voir des matériaux plus intéressants? Soutenez-nous en passant une commande ou en recommandant à vos amis
des VPS basés sur le cloud pour les développeurs à partir de 4,99 $ , un
analogue unique de serveurs d'entrée de gamme que nous avons inventés pour vous: Toute la vérité sur les VPS (KVM) E5-2697 v3 (6 cœurs) 10 Go DDR4 480 Go SSD 1 Gbit / s à partir de 19 $ ou comment diviser le serveur? (les options sont disponibles avec RAID1 et RAID10, jusqu'à 24 cœurs et jusqu'à 40 Go de DDR4).
Dell R730xd 2 fois moins cher au centre de données Equinix Tier IV à Amsterdam? Nous avons seulement
2 x Intel TetraDeca-Core Xeon 2x E5-2697v3 2.6GHz 14C 64GB DDR4 4x960GB SSD 1Gbps 100 TV à partir de 199 $ aux Pays-Bas! Dell R420 - 2x E5-2430 2.2Ghz 6C 128GB DDR3 2x960GB SSD 1Gbps 100TB - à partir de 99 $! Pour en savoir plus sur la
création d'un bâtiment d'infrastructure classe utilisant des serveurs Dell R730xd E5-2650 v4 coûtant 9 000 euros pour un sou?