Pour obtenir suffisamment de données de formation pour les robots, vous n'avez pas besoin d'utiliser une foule de personnes pour annoter les vidéos manuellement

Après avoir lu un livre sur un sujet spécifique, vous ne deviendrez pas un expert en la matière. Comment pouvez-vous ne pas devenir lui en lisant beaucoup sur les mêmes livres. Afin de devenir un véritable professionnel dans n'importe quel domaine de la connaissance, il est nécessaire de collecter une grande quantité d'informations auprès de diverses sources.
Il en sera de même pour les robots et autres technologies basées sur l'IA.
Les réseaux de neurones profonds responsables du fonctionnement du robot mobile nécessitent une formation complète. Ils doivent étudier à la fois les situations auxquelles ils peuvent faire face dans des conditions quotidiennes et les cas inhabituels auxquels ils n'auront jamais à faire face s'ils ont de la chance. La clé du succès est de s'assurer qu'ils sont formés sur les bonnes données.
Mais quelles sont les données appropriées? Ce sont des situations nouvelles ou incertaines, et non une répétition constante de la même chose.
L'apprentissage actif est une méthode de sélection des données d'apprentissage pour l'apprentissage automatique qui trouve automatiquement ces données diverses. De plus, il recueille des ensembles de données pendant une petite fraction du temps qu'il faudrait aux gens pour accomplir cette tâche.
Il fonctionne à l'aide d'un modèle formé, qui itère sur les données collectées et marque ces cadres, avec la reconnaissance desquels il a eu des difficultés. Ensuite, ces cadres sont marqués par des personnes. Ils sont ensuite ajoutés aux données d'entraînement. Cela augmente la précision du modèle dans des situations telles que la reconnaissance d'objets dans des conditions difficiles.
Comment rechercher une aiguille dans une pile de données
La quantité de données nécessaires pour entraîner un robot est monstrueuse. Les experts de
RAND Corporation estiment que la voiture doit parcourir 17 milliards de kilomètres pour dépasser la personne avec une précision de 20%. Pour ce faire, une flotte de 100 voitures dans le monde réel devrait conduire en continu pendant 500 ans.
De plus, toutes les données obtenues lors de la conduite sur route ne conviennent pas à cette tâche. Des données d'entraînement efficaces doivent contenir des conditions diverses et complexes pour garantir une conduite en toute sécurité.
Si les gens cherchaient et marquaient ces données, le traitement des données reçues par une flotte de 100 voitures qui voyageait 8 heures par jour nécessiterait le travail de plus d'un million de marqueurs, qui devaient marquer les données de toutes les caméras de toutes les voitures - ce qui est clairement une tâche impossible. Outre le coût du travail humain, l'allocation des ressources pour le stockage des données et l'informatique des réseaux de neurones serait peu pratique.
La combinaison du balisage et de l'approbation des données pose un sérieux défi au développement des robots. En appliquant l'IA à ce processus, vous pouvez économiser du temps et de l'argent sur la formation, tout en augmentant la précision des réseaux de neurones.
Pourquoi l'apprentissage actif
Il existe trois méthodes courantes de sélection des données pour la formation des réseaux neuronaux de robots. L'échantillonnage aléatoire sélectionne des images de la base de données à intervalles réguliers, ce qui décrit les scénarios les plus courants, mais il risque de passer à côté de rares cas.
L'échantillonnage basé sur les métadonnées utilise des étiquettes de base (par exemple, «pluie», «nuit») pour échantillonner les données, ce qui facilite la recherche de situations difficiles courantes, mais également le manque de cadres uniques qui ne peuvent pas être facilement classés - comme une remorque avec un tracteur ou une personne avec des cavaliers traversant la route.
 Comparaison de la scène habituelle sur l'autoroute (en haut à gauche) avec des scénarios inhabituels: un cycliste de nuit sur la roue arrière, une camionnette avec une remorque avec une remorque, un piéton sur des cavaliers.
Comparaison de la scène habituelle sur l'autoroute (en haut à gauche) avec des scénarios inhabituels: un cycliste de nuit sur la roue arrière, une camionnette avec une remorque avec une remorque, un piéton sur des cavaliers.Enfin, l'échantillonnage manuel utilise des balises de métadonnées avec les personnes qui consultent les trames - une telle tâche prend du temps, est sujette aux erreurs et ne s'adapte pas bien.
L'apprentissage actif permet d'automatiser le processus de sélection des trames, tout en sélectionnant des points de référence précieux dans les données. Cela commence par la formation d'un réseau neuronal spécial sur des données déjà étiquetées. Après cela, le réseau traite les données non allouées, choisissant des trames qu'il ne peut pas reconnaître - ainsi, il recherche des données qui seront difficiles pour l'algorithme de la voiture robot. Ces données sont ensuite étudiées et balisées par des personnes, et ajoutées à la base de données de formation.
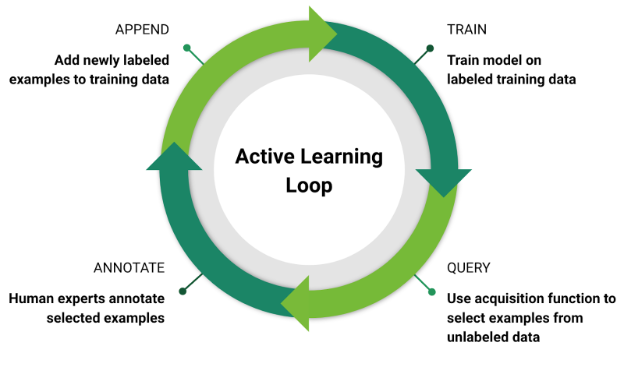 Boucle d'apprentissage actif: pour former le modèle sur des données étiquetées, faire une sélection de données non allouées, marquer les données sélectionnées en utilisant du travail humain, ajouter de nouvelles données étiquetées à la base de données; répéter.
Boucle d'apprentissage actif: pour former le modèle sur des données étiquetées, faire une sélection de données non allouées, marquer les données sélectionnées en utilisant du travail humain, ajouter de nouvelles données étiquetées à la base de données; répéter.L'entraînement actif a déjà montré sa capacité à augmenter la précision du fonctionnement des réseaux neuronaux de robots par rapport à l'ajout manuel de données. Dans notre
étude, nous avons constaté que l'augmentation de la précision lors de l'utilisation de l'entraînement actif dépasse l'augmentation de la précision avec un échantillonnage manuel des données jusqu'à 3 fois pour la reconnaissance des piétons et jusqu'à 4,4 fois pour les cyclistes.
Dans le même temps, les méthodes de formation avancées pour les réseaux de neurones, par exemple, l'apprentissage actif, l'apprentissage par
transfert et l'
apprentissage collaboratif fonctionnent plus efficacement sur une infrastructure fiable et évolutive qui vous permet de traiter simultanément d'énormes quantités de données, raccourcissant le cycle de développement. L'accès à ces capacités est fourni par le projet
NVIDIA GPU Cloud , où il y a à la fois les outils de formation mentionnés et une grande bibliothèque de réseaux de neurones profonds pour les robots.