Contexte
L'été chaud se terminait, derrière, de merveilleuses vacances en famille sur la mer douce et chaude, et les contours des journées de travail grises étaient déjà visibles. Pour ne pas succomber à la dépression d'automne, il était urgent de faire quelque chose d'agréable et d'utile, et ce quelque chose n'a pas tardé: le fils aîné a dû préparer le travail pour la conférence scolaire. Le thème du travail est déjà en suspens depuis longtemps. Je suis avec beaucoup d'intérêt les publications de l'auteur de Neoprog «Développement de l'hexapode à partir de zéro». Et ce sont ses articles qui nous ont inspiré à travailler dans ce sens.
La construction
En tant qu'éléments structurels moteurs, nous avons choisi les servos MG-996R. Parmi les caractéristiques revendiquées, elles ont des caractéristiques assez élevées et de puissance à un coût relativement faible. Les dimensions et la conception de ce servomoteur ont constitué la base de la conception future du robot, que nous avions initialement prévu de fabriquer en plastique en utilisant l'impression 3D.
La première étape a été de fabriquer et de tester un prototype fonctionnel d'un seul membre.

N'ayant aucune expérience dans les programmes de modélisation 3D, nous avons frivolement décidé de traduire nos croquis papier en un modèle tridimensionnel à l'aide de l'éditeur de générateur 3D intégré à Windows 10. Pour toute sa simplicité, cet éditeur dispose d'un arsenal assez étendu et vous permet de créer des modèles 3D assez complexes.
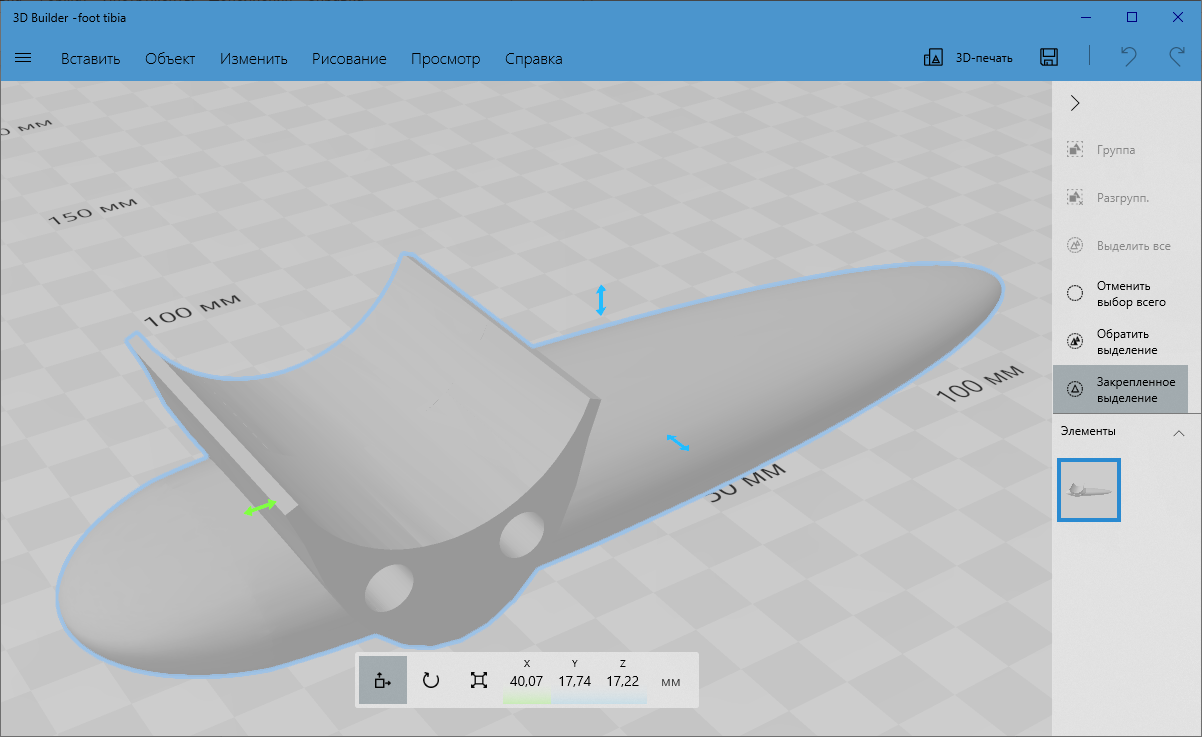
Mais la simplicité de travailler dans cet éditeur est aussi son point faible. Le manque de contrôle sur le nombre de sommets dans le modèle conduit au fait qu'après un déchiquetage et un collage répétés, un modèle d'aspect simple commence à avoir un
monde intérieur énorme avec le nombre de polygones et l'éditeur commence à faire une sorte de recalcul interne du modèle, vous permettant seulement de contempler votre création sans la possibilité de modifier quelque chose.
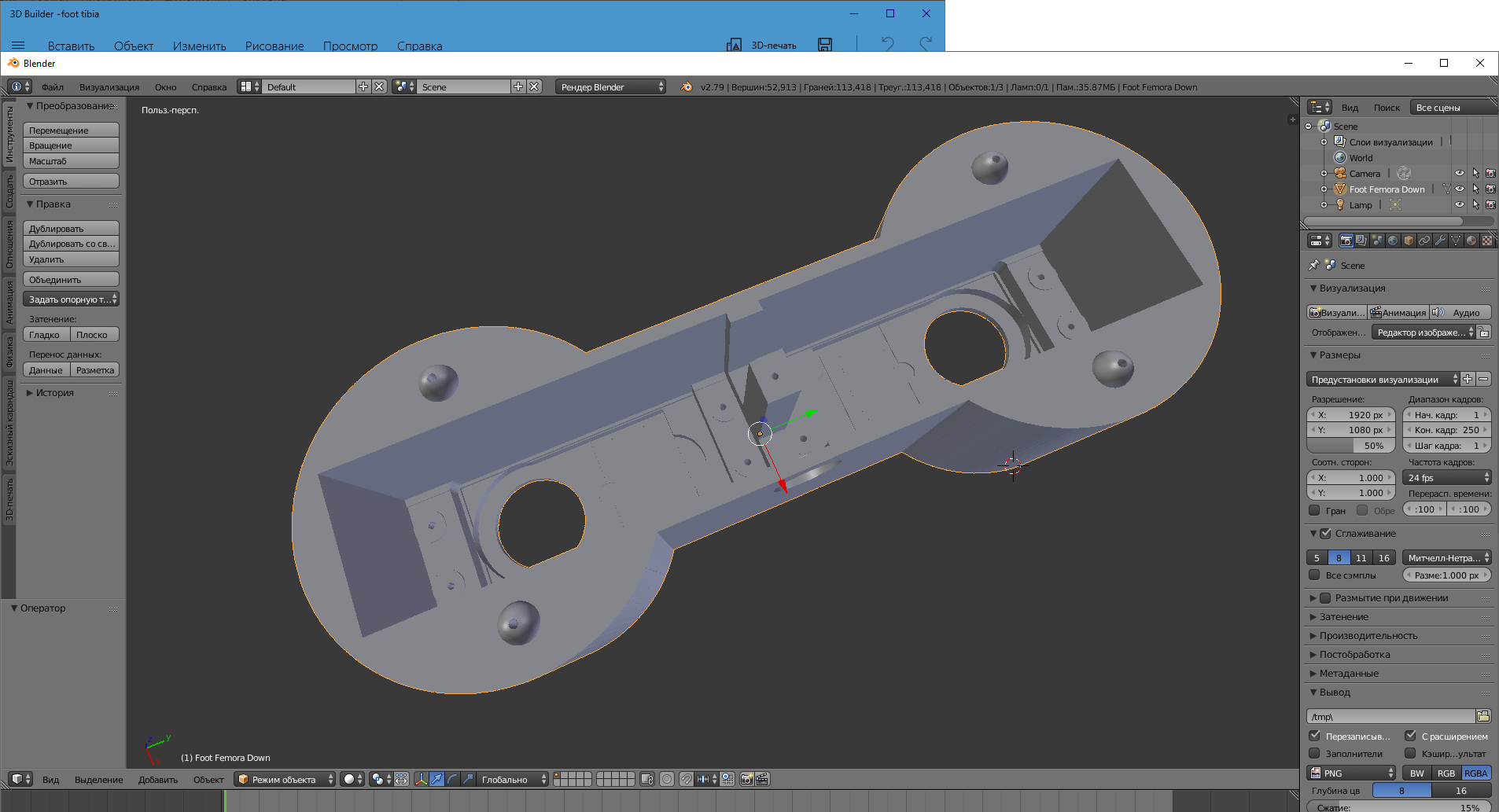
Après une rapide analyse des éditeurs disponibles, il était de coutume d'utiliser Blender en raison de sa gratuité
et de son
incompréhensibilité et du fait que j'ai entrepris de l'étudier plusieurs fois et que toutes les tentatives se sont soldées par un échec. Cette fois, la présence d'un objectif spécifique a porté ses fruits. La compétence minimale mais suffisante dans l'éditeur a été maîtrisée et nous avons poursuivi le développement. Je voudrais noter qu'à l'avenir, nous n'avons pas complètement refusé de travailler dans un constructeur 3D. Il est encore beaucoup plus pratique d'effectuer certaines actions de finition avec le modèle: faire des trous de vis, découper des cavités internes de forme complexe, et bien plus encore.
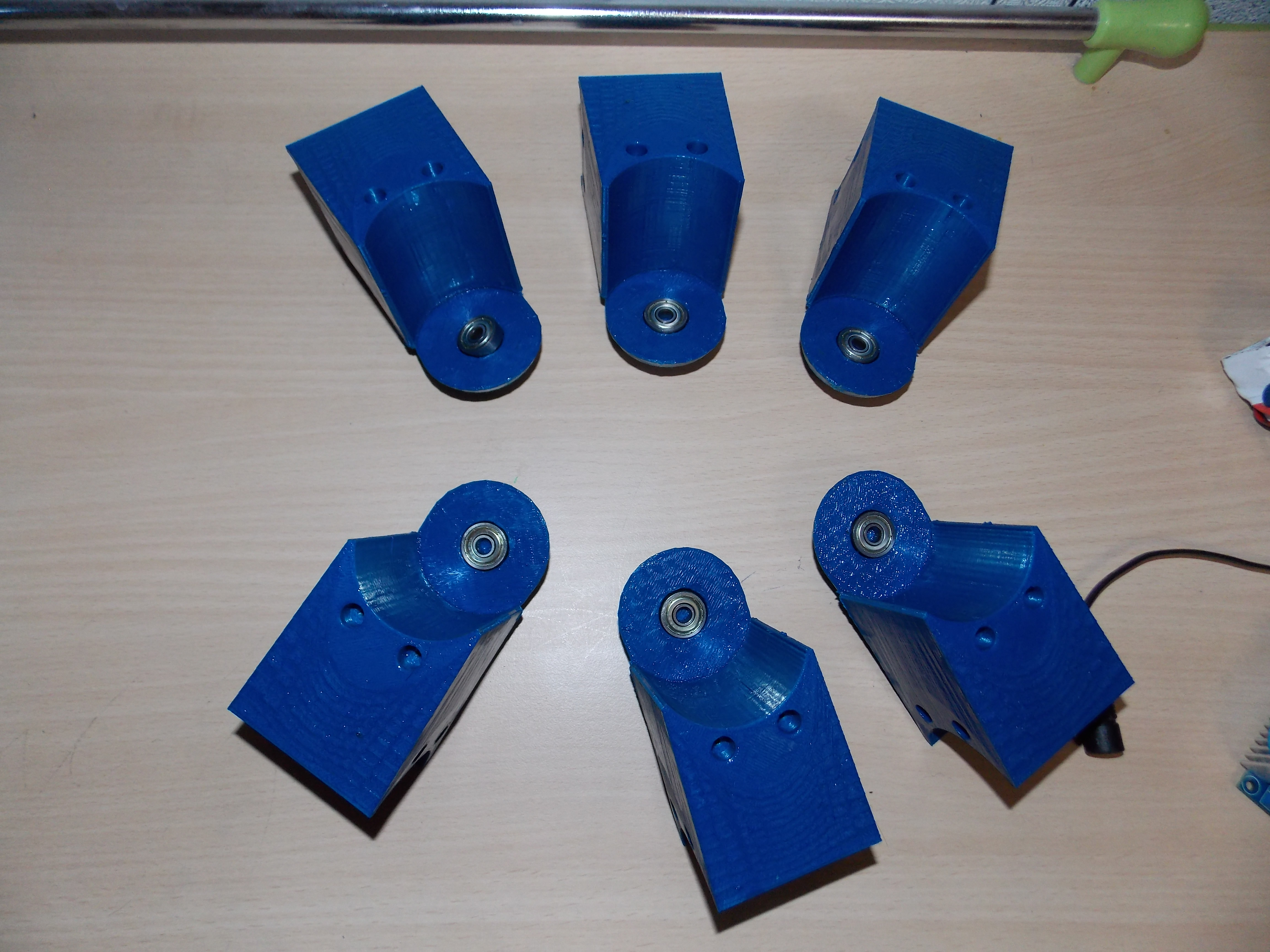
Lors de la conception des membres, nous avons fixé au maximum la tâche de masquer les servos à l'intérieur de l'enceinte. En général, cela était possible, mais les boucles devaient tout de même être laissées à l'extérieur afin de réduire l'impact mécanique lorsque les joints étaient pliés. Avec la conception vous permet de maintenir la liberté de mouvement des articulations dans une plage presque maximale de 0 à 180 degrés. Pour réduire la friction et l'usure, un roulement est prévu dans chaque joint.

Pour l'impression, nous avons utilisé l'imprimante 3D Infintary, qui a été achetée il y a quelques années sous le ciel. Le processus est plutôt tranquille, il a donc fallu plus d'une journée pour imprimer l'ensemble des membres.

Pendant ce temps, nous avons fait un croquis et construit un modèle 3D du cadre auquel les membres devraient être attachés. Il héberge également des servos des articulations de l'épaule.

Impression et assemblage
Une fois l'impression terminée, nous avons commencé l'assemblage des membres et l'assemblage final. Dans une version démontée, une sorte de constructeur s'est avéré:
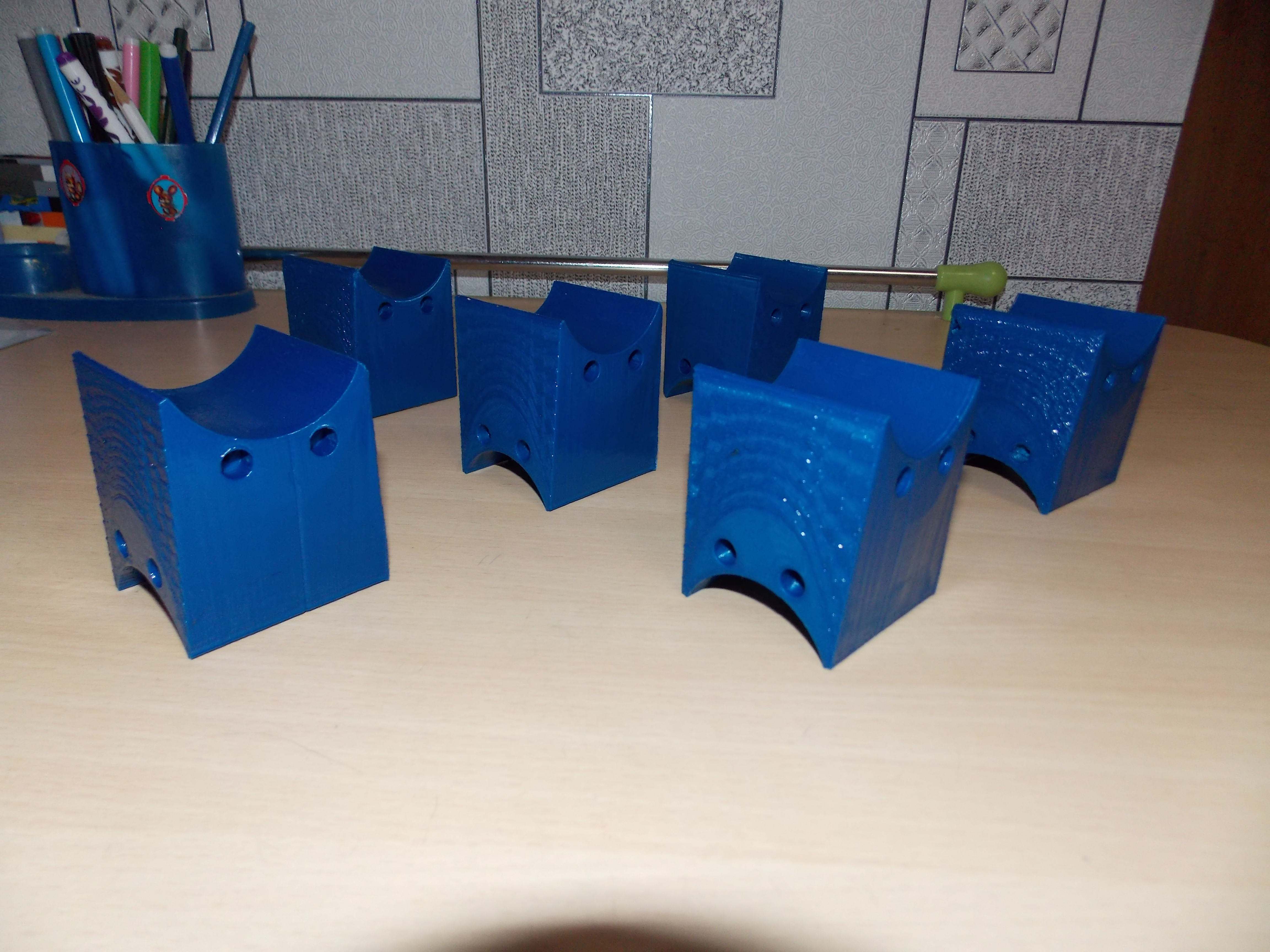



Lors du montage, l'essentiel est de ne pas oublier d'insérer les roulements et la traction des servos.

Un point important: au moment du montage, tous les servos doivent être amenés en position médiane. Pour calibrer la position des articulations des épaules, nous avons imprimé et subventionné un pochoir spécial.


En conséquence, nous avons obtenu une assez belle plate-forme à six pattes, dont la revitalisation a été occupée par tous nos loisirs.

Remplissage électronique
À ce moment, l'ensemble principal de remplissage électronique pour revitaliser le robot a été compilé et doté en personnel. Il comprend des composants prêts à l'emploi, à savoir:
- Contrôleur principal Arduino UNO + WiFi R3 ATmega328P + ESP8266
- Stabilisateurs réglables DC / DC Max 9A 300 W - 6 pcs.
- Batteries à courant élevé HG2 18650 3000 mAh - 3 pcs.
- Contrôleur de charge BMS 3S 11,1 V 12,6 V 40A
- Blindage multiservo avec 18 servos pilotés par le bus I2C.
L'utilisation de composants standard a affecté négativement la taille du robot. Nous avons dû construire un deuxième niveau au-dessus du cadre principal, dans lequel nous avons placé des stabilisateurs et un bouclier d'asservissement.

La carte Arduino et le système d'alimentation
installés sur le toit sont situés au troisième étage du bâtiment. Nous prévoyons d'ajouter ici quelques écrans oled simulant les yeux, un microphone, une caméra et un capteur de distance.

Actuellement, la plupart des travaux prévus que nous avons achevés. «Hexa» (comme nous l'appelions avec le fils de notre robot) est créé et il peut être contrôlé via des appareils telnet ou Android via une application spécialement écrite.
Postface
Le chantier est déjà en plein hiver, les journées deviennent plus longues et plus lumineuses. Cela signifie que le printemps et la bonne humeur sont à nos portes. Je serais heureux si ma première et, espérons-le, pas la dernière publication était intéressante ou utile à quiconque. Le sujet de l'article était axé uniquement sur la description du processus de création, de sorte que le remplissage du logiciel et tout le reste restait dans les coulisses. Si vous êtes intéressé, vous pouvez consacrer les articles suivants à ce sujet. Prêt à répondre à toutes les questions.
Merci de votre attention!
Modèle 3D à télécharger