Google ने रोबोटों के परीक्षण पर एक मई की रिपोर्ट प्रकाशित की है
रोबोट सेल्फ प्रोजेक्ट पर काम करने वाले इंजीनियरों की टीम की एक छोटी सी पीडीएफ रिपोर्ट Google सेल्फ-ड्राइविंग कार प्रोजेक्ट वेबसाइट पर दिखाई दी है । जाहिर है, ऐसे दस्तावेज मासिक रूप से प्रकाशित किए जाएंगे। इस तथ्य के बावजूद कि वर्तमान रिपोर्ट में केवल कुछ पृष्ठ हैं, यह विस्तार से सड़क की घटनाओं का वर्णन करता है जिसमें पिछले छह वर्षों में खोज विशाल की रोबोट कारों का परीक्षण शुरू करने के बाद से इसमें शामिल होने में कामयाब रहे।सबसे पहले, Google आंकड़ों को स्पष्ट करता है: 23 लेक्सस RX450h एसयूवी जो मुख्य रूप से माउंटेन व्यू में कैलिफोर्निया सड़कों के साथ ड्राइव करते हैं, कार्यक्रम में भाग ले रहे हैं। उनके अलावा, बंद लैंडफिल में 9 और प्रोटोटाइप हैं। 2009 के बाद से, रोबोटिकबल्स ने रोबोट मोड में 1,627,591 किलोमीटर की दूरी तय की (इसका मतलब है कि यह केवल सॉफ्टवेयर द्वारा नियंत्रित किया जाता है, और कार में स्टीयरिंग व्हील का चालक स्पर्श नहीं करता है)। एक सप्ताह के दौरान, औसतन, लुटेरों ने खुली सड़कों पर 16,000 किमी की यात्रा की।छह साल के लिए, 12 दुर्घटनाएँ हुईं जिनमें लुटेम्बाइल्स शामिल थे, जो सभी लोगों की गलती के कारण हुए। निकटतम मई दुर्घटना लेक्सस के लिए हुई थी जब यह माउंटेन व्यू में चौराहे पर एक लाल बत्ती पर रुक गई थी। इस समय, एक मानव-चालित कार ने लेक्सस रियर बम्पर को उखाड़ फेंका और इस तरह सेंसर को क्षतिग्रस्त कर दिया। उस क्षण अपराधी की गति लगभग 1.5 किमी / घंटा थी, जिससे दुर्घटना गंभीर क्षति के बिना समाप्त हो गई।यह दिलचस्प है कि लुटेरों द्वारा सामना की गई कठिन ट्रैफ़िक स्थितियों का मूल्यांकन कैसे किया जाता है और वे उनसे कैसे निकलते हैं: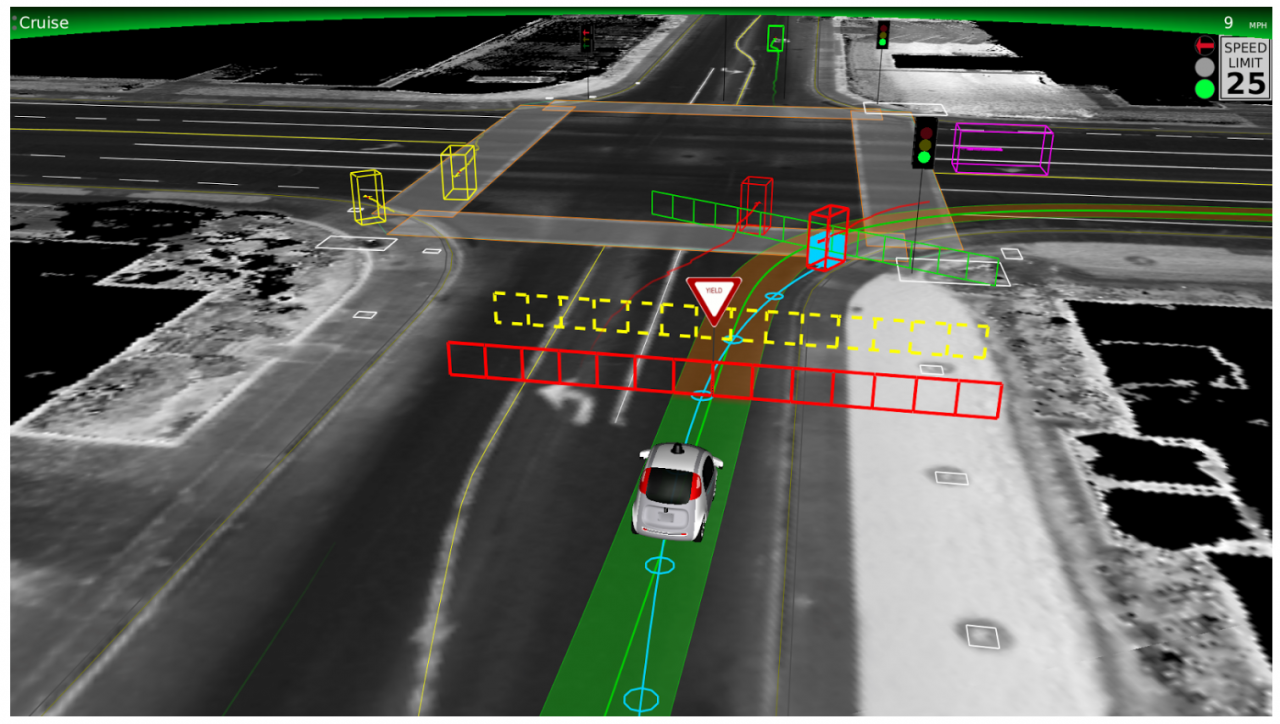 ऊपर दिए गए आरेख में चौराहे पर एक डाकू की चाल योजना और दो मोटर साइकिल चालकों को दिखाया गया है, जो लाल समानताएं (एक टूटी हुई लाल रेखा जिस तरह से वे चलती हैं) द्वारा इंगित की जाती हैं। रोबोकर चौराहे पर रुक गया, जिस समय उसके सम्मान के साथ मोटरसाइकिल चालक ने चौराहे को अपेक्षाकृत सफलतापूर्वक पार किया और चला गया। लेकिन मोटरसाइकिल, रोबोकार की ओर दाएं मुड़ते हुए, अज्ञात कारण से आने वाले ट्रैफ़िक में चली गई, ताकि यह Google कार के मार्ग में सही हो - इसकी गणना की गति को एक नीली रेखा द्वारा दिखाया गया है। कार सॉफ्टवेयर ने रुकने और आगे नहीं जाने का फैसला किया, जिससे मोटरसाइकिल को चौराहे पर टकराव से बचने की अनुमति मिलती है। नतीजतन, एक दुर्घटना में परेशानी से बचने के लिए, रोबोकार और मोटरसाइकिल सुरक्षित रूप से एक-दूसरे से चूक गए। अतिरिक्त कठिनाई यह थी कि सब कुछ अंधेरे में हुआ,और मानव चालक के लिए स्थिति का सही आकलन करना मुश्किल होगा।
ऊपर दिए गए आरेख में चौराहे पर एक डाकू की चाल योजना और दो मोटर साइकिल चालकों को दिखाया गया है, जो लाल समानताएं (एक टूटी हुई लाल रेखा जिस तरह से वे चलती हैं) द्वारा इंगित की जाती हैं। रोबोकर चौराहे पर रुक गया, जिस समय उसके सम्मान के साथ मोटरसाइकिल चालक ने चौराहे को अपेक्षाकृत सफलतापूर्वक पार किया और चला गया। लेकिन मोटरसाइकिल, रोबोकार की ओर दाएं मुड़ते हुए, अज्ञात कारण से आने वाले ट्रैफ़िक में चली गई, ताकि यह Google कार के मार्ग में सही हो - इसकी गणना की गति को एक नीली रेखा द्वारा दिखाया गया है। कार सॉफ्टवेयर ने रुकने और आगे नहीं जाने का फैसला किया, जिससे मोटरसाइकिल को चौराहे पर टकराव से बचने की अनुमति मिलती है। नतीजतन, एक दुर्घटना में परेशानी से बचने के लिए, रोबोकार और मोटरसाइकिल सुरक्षित रूप से एक-दूसरे से चूक गए। अतिरिक्त कठिनाई यह थी कि सब कुछ अंधेरे में हुआ,और मानव चालक के लिए स्थिति का सही आकलन करना मुश्किल होगा। Source: https://habr.com/ru/post/hi380391/
All Articles