एक में पिछले लेख में, यह मैनुअल मोड में डेल्टा प्रिंटर ठीक करना कैसे दिखाया गया था। लेकिन सेटिंग्स की जटिलता और जटिलता के कारण, यह ऑटो अंशांकन करने का निर्णय लिया गया था। चूंकि अंतिम संस्करण परीक्षण और विनिर्माण चरण में है, इसलिए हम अभी भी अपने ग्राहकों के लिए जीवन को आसान बनाना चाहते हैं, और उन सभी के लिए जिन्होंने इस योजना के अनुसार खुद के लिए प्रिंटर बनाया है। अगला, ऑटो अंशांकन को लागू करने के तरीकों में से एक पर विचार किया जाएगा।कई दृष्टिकोण हैं, एक माइक्रोसेविच, एफएसआर सेंसर, एक हॉल सेंसर, आदि के साथ एक बेदखलदार पर एक वापस लेने योग्य जांच स्थापित करना। लेकिन इन प्रणालियों में एक महत्वपूर्ण खामी है - वे दूरी को नोजल तक नहीं मापते हैं, बल्कि सीधे सेंसर तक पहुंचते हैं, साथ ही, कुछ मामलों में, संरेखण विफल हो सकता है (यदि नोजल के बजाय सेंसर स्थित नहीं है, तो ज्यामिति गणना का उल्लंघन हो सकता है। सटीकता का उल्लेख नहीं करने के लिए) ।आदर्श विकल्प मेज पर नोजल के स्पर्श को ठीक करना है। और यहां आप दो तरीकों से जा सकते हैं:- HotEnd और effector के बीच एक विद्युत संपर्क बनाएँ, जिससे कि HotEnd चल सके और जब आप उस पर क्लिक करें तो संपर्क खुल जाए (या बंद हो जाए)।
- धातु नोजल और तालिका के बीच एक विद्युत संपर्क बनाएं।
पहला विकल्प निर्माण और काम की स्थिरता में अधिक जटिल है, लेकिन उचित डिजाइन के साथ शरीर के अतिरिक्त आंदोलनों के बिना एक स्थायी स्थिर परिणाम देगा।दूसरा विकल्प उपयोग करने के लिए कम सुविधाजनक है, लेकिन इसे लागू करना सरल है, और सबसे अधिक बार अंशांकन शायद ही कभी आवश्यक होता है और आवश्यकतानुसार किया जा सकता है।हम दूसरी विधि के बारे में बात करेंगे: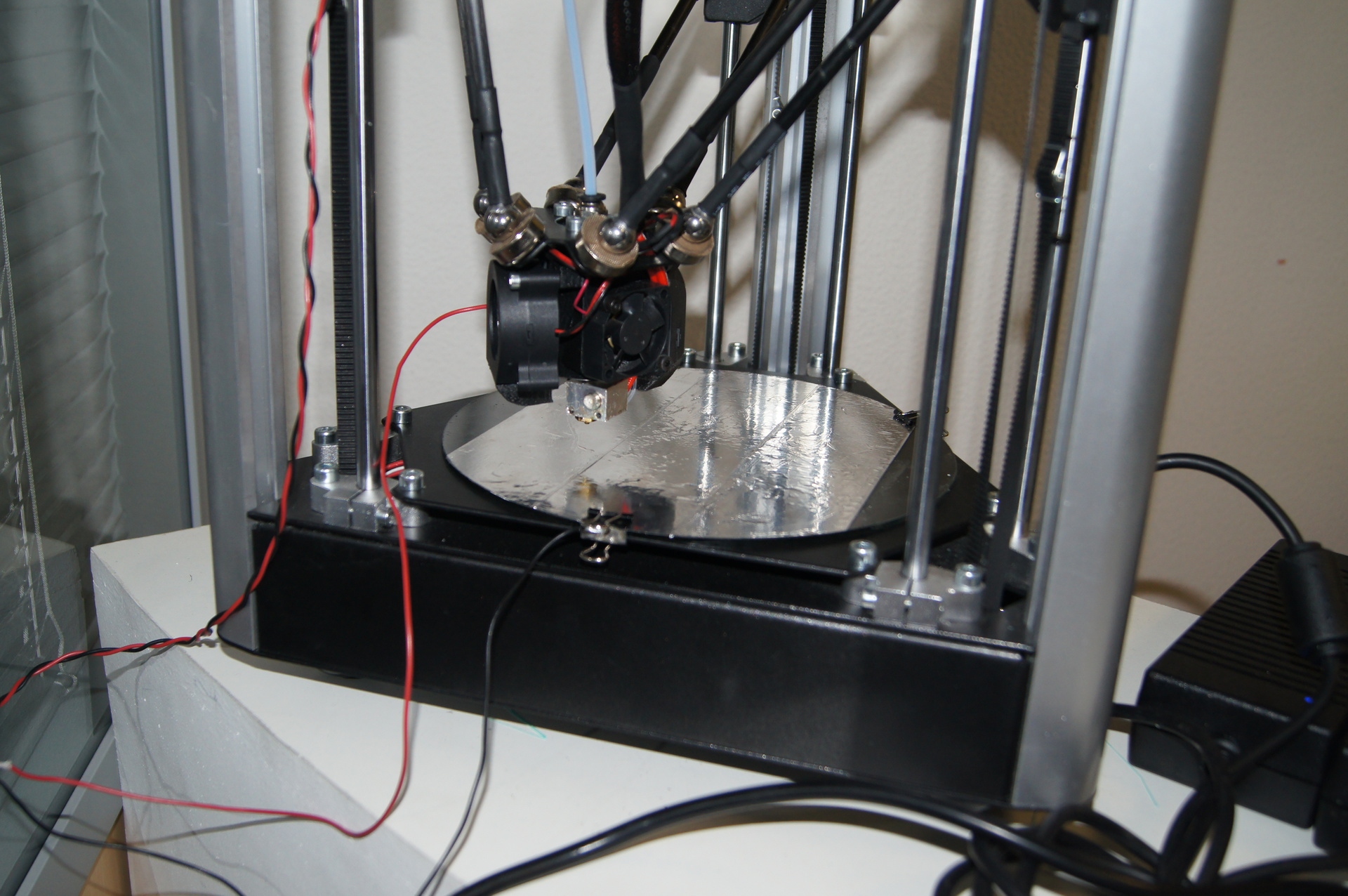 हमें जिस टूल की आवश्यकता है:
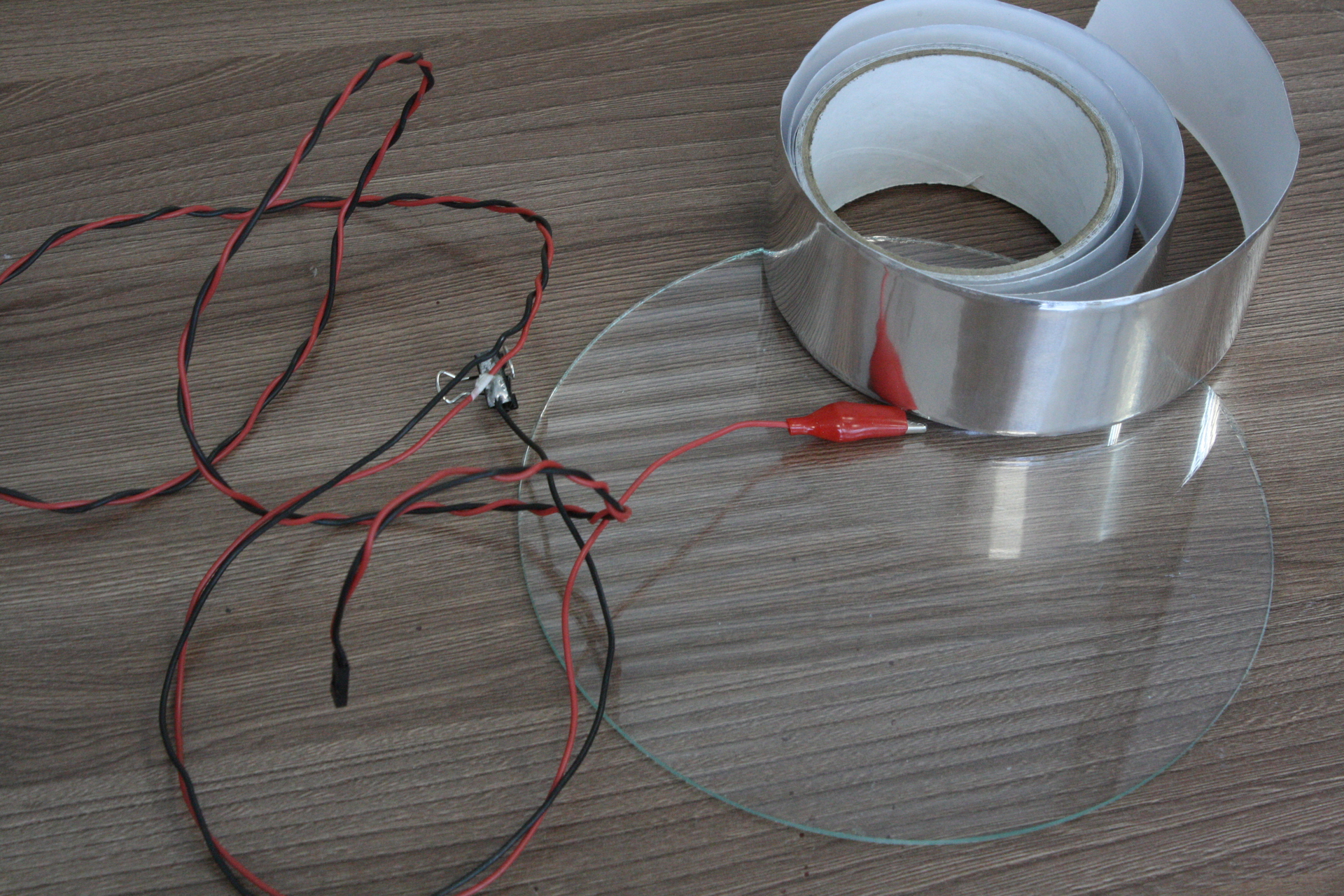
हमें जिस टूल की आवश्यकता है:- एल्यूमीनियम स्कॉच टेप (वास्तव में, यह एक चिपकने वाला आधार पर एल्यूमीनियम पन्नी है, और वहां सभी प्रकार के मजबूत टेप नहीं हैं)
- "मगरमच्छ" - गर्म अंत धातु के मामले में संपर्कों में से एक को जोड़ने के लिए, सिद्धांत रूप में, आप किसी भी पेपर क्लिप के साथ कर सकते हैं, या तार के अंत को खराब कर सकते हैं या इसे टांका लगा सकते हैं (गंभीर रूप से लेकिन प्रभावी रूप से)
- कार्यालय का कपड़ा
- हमारे तात्कालिक सेंसर को RAMPS 1.4 बोर्ड से जोड़ने के लिए (या अपने बोर्ड पर संबंधित EndStop कनेक्टर को) पिन ब्लॉक 2.54। कुछ लोगों के पास इस तरह के ब्लॉक को बढ़ाने के लिए एक ऐंठन है, लेकिन आप कंप्यूटर यूनिट में "ट्वीटर" या बटन से इसे हटाकर एक समान ब्लॉक पा सकते हैं।
- सामान को मिलाप करना, एक सक्रिय प्रवाह और कम शक्तिशाली टांका लगाने वाला लोहा होना वांछनीय है।
- तार, लगभग एक मीटर।
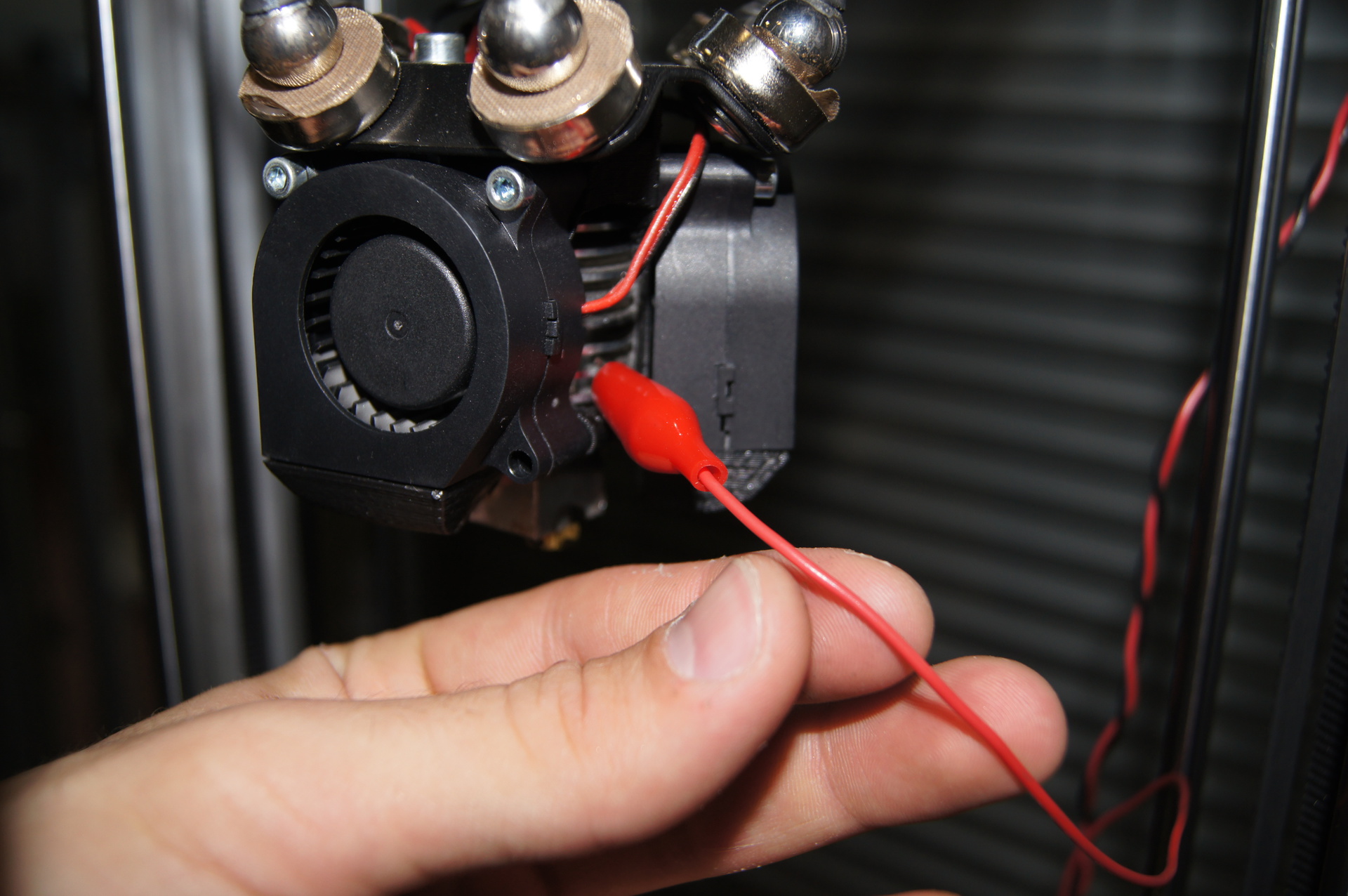
हमारे वर्क प्लेन (ग्लास) में करंट-कंडक्टिंग लेयर लगाने का सबसे सरल तरीका एल्युमिनियम टेप का स्टिकर था, लेकिन इसे समान रूप से चिपकाना और इसे चिकना करना महत्वपूर्ण है ताकि टेप स्ट्रिप्स के बीच विद्युत संपर्क हो, यह "रिंगिंग" के लिए मल्टीमीटर के साथ प्राथमिक रूप से जांचा जाता है। इसके अलावा, स्विचिंग के लिए, आपको एक तार बनाना चाहिए, जैसा कि पहले लिखा गया था, एक सिरे को एक ब्लॉक 2.54 (या सोल्डर) में निचोड़ें, अन्य दो छोरों को हॉटएंड के रेडिएटर और एल्यूमीनियम टेप पर टेबल पर तय किया जाएगा। रेडिएटर को क्रॉल करने के लिए हम एक साधारण मगरमच्छ लेते हैं और तार के सिरों में से एक को मिलाते हैं, टांका लगाने में आसानी के लिए मैं एसिड का उपयोग करने की सलाह देता हूं, हालांकि मैंने इसे अच्छे हीटिंग और साधारण रसिन के साथ प्रबंधित किया, दूसरा छोर भी मगरमच्छ को मिलाया जा सकता है, लेकिन इस मामले में चिपकने वाला टेप को नुकसान पहुंचाने का एक मौका है। जब तय हो, और मगरमच्छ काफी बड़ा होना चाहिए। हमने निम्नानुसार काम किया: एक पेपर क्लिप लें और इसे पेंट से साफ करें (अधिमानतः सभी पक्षों से)। यहाँ महत्वपूर्ण बिंदु हैहम साधारण मिलाप (PIC 61) के साथ एक धातु के कपड़े के लिए एक तांबे के तार को मिलाप करेंगे और केवल एक सफल टांका लगाने के लिए, हमें एक सक्रिय प्रवाह की आवश्यकता है, हमने साधारण ऑर्थोफोस्फोरिक एसिड (सोल्डरिंग एसिड) का उपयोग किया।
इसके अलावा, स्विचिंग के लिए, आपको एक तार बनाना चाहिए, जैसा कि पहले लिखा गया था, एक सिरे को एक ब्लॉक 2.54 (या सोल्डर) में निचोड़ें, अन्य दो छोरों को हॉटएंड के रेडिएटर और एल्यूमीनियम टेप पर टेबल पर तय किया जाएगा। रेडिएटर को क्रॉल करने के लिए हम एक साधारण मगरमच्छ लेते हैं और तार के सिरों में से एक को मिलाते हैं, टांका लगाने में आसानी के लिए मैं एसिड का उपयोग करने की सलाह देता हूं, हालांकि मैंने इसे अच्छे हीटिंग और साधारण रसिन के साथ प्रबंधित किया, दूसरा छोर भी मगरमच्छ को मिलाया जा सकता है, लेकिन इस मामले में चिपकने वाला टेप को नुकसान पहुंचाने का एक मौका है। जब तय हो, और मगरमच्छ काफी बड़ा होना चाहिए। हमने निम्नानुसार काम किया: एक पेपर क्लिप लें और इसे पेंट से साफ करें (अधिमानतः सभी पक्षों से)। यहाँ महत्वपूर्ण बिंदु हैहम साधारण मिलाप (PIC 61) के साथ एक धातु के कपड़े के लिए एक तांबे के तार को मिलाप करेंगे और केवल एक सफल टांका लगाने के लिए, हमें एक सक्रिय प्रवाह की आवश्यकता है, हमने साधारण ऑर्थोफोस्फोरिक एसिड (सोल्डरिंग एसिड) का उपयोग किया।
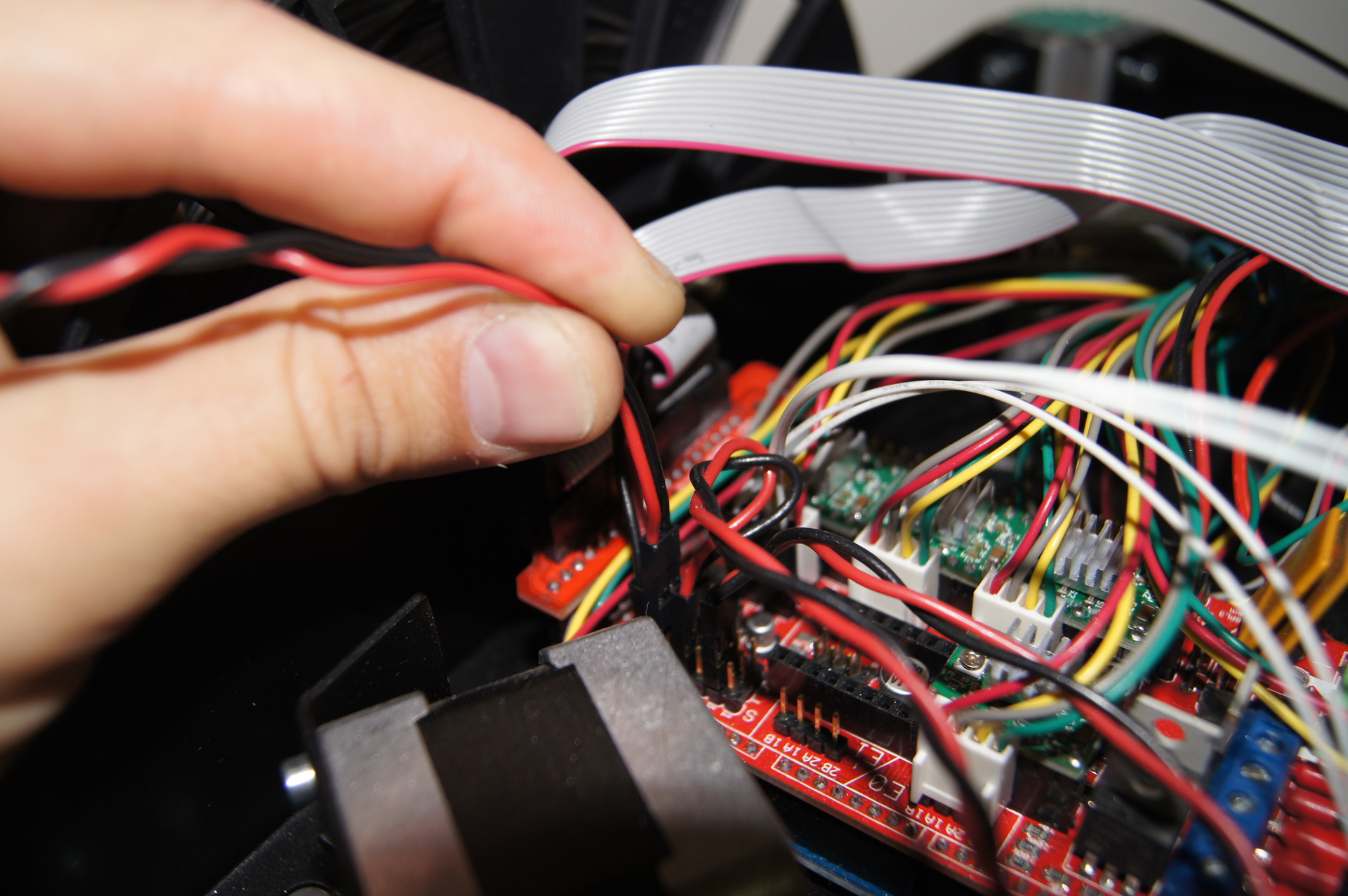
 निम्नलिखित बोर्ड और प्रिंटर के लिए कनेक्शन की तस्वीरें हैं। हमारे प्रिंटर पर तारों के छोर जेड-मैक्स से जुड़े हुए हैं। और फर्मवेयर में यह इंगित करना आवश्यक है कि सीमा स्विच (हमारा सेंसर, बंद या खुला) की सामान्य स्थिति क्या है। इस दृष्टिकोण के साथ, सेंसर सामान्य स्थिति में खुला है।
निम्नलिखित बोर्ड और प्रिंटर के लिए कनेक्शन की तस्वीरें हैं। हमारे प्रिंटर पर तारों के छोर जेड-मैक्स से जुड़े हुए हैं। और फर्मवेयर में यह इंगित करना आवश्यक है कि सीमा स्विच (हमारा सेंसर, बंद या खुला) की सामान्य स्थिति क्या है। इस दृष्टिकोण के साथ, सेंसर सामान्य स्थिति में खुला है।
 डेल्टा प्रिंटर के लिए ऑटो अंशांकन के साथ फर्मवेयर यहां से लिया जा सकता है: ऑटोकैब्रेशन अपडेट के साथ मार्लिन डेल्टा फर्मवेयर। रिचकटेलफर्मवेयर सेटिंग्स:Cohfiguration.h
डेल्टा प्रिंटर के लिए ऑटो अंशांकन के साथ फर्मवेयर यहां से लिया जा सकता है: ऑटोकैब्रेशन अपडेट के साथ मार्लिन डेल्टा फर्मवेयर। रिचकटेलफर्मवेयर सेटिंग्स:Cohfiguration.h
#define AUTOCALIBRATION_PRECISION 0.03
#define BED_DIAMETER 170
const bool X_MIN_ENDSTOP_INVERTING = false;
const bool Y_MIN_ENDSTOP_INVERTING = false;
const bool Z_MIN_ENDSTOP_INVERTING = false;
const bool X_MAX_ENDSTOP_INVERTING = false;
const bool Y_MAX_ENDSTOP_INVERTING = false;
const bool Z_MAX_ENDSTOP_INVERTING = true;
तारों को जोड़ने और प्रिंटर फर्मवेयर को समायोजित करने के बाद, आपको स्वयं अंशांकन शुरू करने की आवश्यकता है। और यहां एक बहुत महत्वपूर्ण बिंदु है कि कैलिब्रेशन कंप्यूटर से किया जाना चाहिए, क्योंकि प्रिंटर स्वयं इस ऑपरेशन को सही ढंग से नहीं करता है। स्पष्ट रूप से पर्याप्त डिवाइस मेमोरी नहीं है और अंशांकन बीच में कहीं समाप्त होता है।इसके अलावा, ऑटो अंशांकन की एक विशेषता यह है कि एल्गोरिथ्म क्रमिक रूप से ज्यामिति मापदंडों का चयन करता है, जिसमें काफी समय लग सकता है, खासकर अगर ज्यामिति गंभीर रूप से टूट गई है या प्रारंभिक पैरामीटर सही तरीके से सेट नहीं किए गए हैं (उदाहरण के लिए, विकर्णों की लंबाई 150 मिमी है, और वास्तव में 200 मिमी है। और दिए गए कदम के साथ एल्गोरिथ्म पुन: अंशांकन को हर पुनरावृत्ति को फिर से दोहराएगा, अंत में इसे कैलिब्रेट किया जाएगा, लेकिन यह समय की एक अनिश्चित राशि लेगा)ऑटो कैलिब्रेशन शुरू करने के लिए, प्रिंटर को USB के माध्यम से कनेक्ट करें, और सर्वहारा प्रोग्राम का उपयोग करें। अंशांकन तीन प्रकार के होते हैं:- G30 कमांड - ऑफसेट की कैलिब्रेट करता है - अनिवार्य रूप से ऊंचाई को सीमा स्विच पर सेट करता है।
- टीम G30A - प्रिंटर के पूरे ज्यामिति, विकर्णों की लंबाई, सीमा स्विच (ऊँचाई) का इंडेंटेशन और "टॉवर" के अनुसार ज्यामिति की वक्रता को मापता है - टॉवर (सबसे अधिक संभावना है, प्रिंटर अलग-अलग ऊंचाइयों का समर्थन करता है)
- टीम G29 - तथाकथित AutoBedLevel - तालिका वक्रता का स्वचालित अंशांकन। डेल्टा प्रिंटर पर, यह सबसे सही ढंग से काम करता है, और प्रारंभिक जी-कोड में मुद्रण शुरू होने से तुरंत पहले शुरू होता है।
तदनुसार, अंतिम दो सबसे अधिक प्रासंगिक हैं।निम्नलिखित प्रारंभिक अंशांकन के बिना प्रिंटर कंसोल की एक सूची है और इसे पुनरारंभ करना है।लघु अंशांकन सिद्धांत:- एंडस्टॉप ऑफ़सेट्स की जाँच / समायोजन
- डेल्टा त्रिज्या की जाँच करें / समायोजित करें
- टॉवर ज्यामिति त्रुटियों की जाँच करना
- विकर्ण लंबाई चयन> चेकिंग जियोमेट्री> एंडोस्कोप ऑफसेट को फिर से संगठित करना। जब पहले दो पैरामीटर बदलते हैं, तो तीसरे को चुना जाता है और चक्र को दोहराया जाता है जब तक कि सभी तीन पैरामीटर संतुष्ट नहीं हो जाते।
प्रारंभिक अंशांकन की लिस्टिंग - 4 से 17 तक पुनरावृत्तियों को काट दिया जाता है यह कार्रवाई दोहराता हैConnecting...
start
Printer is now online.
echo:Marlin 1.0.0
echo: Last Updated: Jul 31 2015 11:09:21 | Author: (RichCattell, Prism Mini)
Compiled: Jul 31 2015
echo: Free Memory: 1753 PlannerBufferBytes: 1232
echo:Hardcoded Default Settings Loaded
echo:Steps per unit:
echo: M92 X100.00 Y100.00 Z100.00 E156.00
echo:Maximum feedrates (mm/s):
echo: M203 X200.00 Y200.00 Z200.00 E200.00
echo:Maximum Acceleration (mm/s2):
echo: M201 X9000 Y9000 Z9000 E9000
echo:Acceleration: S=acceleration, T=retract acceleration
echo: M204 S3000.00 T3000.00
echo:Advanced variables: S=Min feedrate (mm/s), T=Min travel feedrate (mm/s), B=minimum segment time (ms), X=maximum XY jerk (mm/s), Z=maximum Z jerk (mm/s), E=maximum E jerk (mm/s)
echo: M205 S0.00 T0.00 B20000 X20.00 Z20.00 E20.00
echo:Home offset (mm):
echo: M206 X0.00 Y0.00 Z0.00
echo:Delta Geometry adjustment:
echo: M666 A0.000 B0.000 C0.000 I0.000 J0.000 K0.000 U0.000 V0.000 W0.000 R66.00 D154.00 H230.00
echo:Endstop Offsets:
echo: M666 X0.00 Y0.00 Z0.00
echo:Z-Probe Offset:
echo: M666 P X0.00 Y0.00 Z0.00
echo:PID settings:
echo: M301 P15.09 I0.75 D76.13
echo:SD init fail
Setting hotend temperature to 190.000000 degrees Celsius.
Setting bed temperature to 70.000000 degrees Celsius.
>>> g30 a
SENDING:G30 A
Starting Auto Calibration..
Calibration precision: +/-0.100mm
| Z-Tower Endstop Offsets
| -7.8500 X:0.00 Y:0.00 Z:0.00
| -5.2400 -8.5900 Tower Offsets
| -6.8400 A:0.00 b:0.00 C:0.00
| -3.7200 -8.0400 I:0.00 J:0.00 K:0.00
| -5.6900 Delta Radius: 66.0000
| X-Tower Y-Tower Diagonal Rod: 154.0000
Iteration: 1
Checking/Adjusting endstop offsets
x:-3.6800 (adj:-3.6800) y:-7.9600 (adj:-7.9600) z:-7.7700 (adj:-7.7700)
X=ERROR Y=ERROR Z=ERROR
x:0.7500 (adj:-2.9300) y:-0.1900 (adj:-8.1500) z:-0.2200 (adj:-7.9900)
X=ERROR Y=ERROR Z=ERROR
x:0.1600 (adj:-2.7700) y:-0.0800 (adj:-8.2300) z:0.0500 (adj:-7.9400)
X=ERROR Y=OK Z=OK
x:0.0300 (adj:-2.7400) y:-0.0200 (adj:-8.2500) z:0.0100 (adj:-7.9300)
X=OK Y=OK Z=OK
| Z-Tower Endstop Offsets
| -0.0300 X:-2.74 Y:-8.25 Z:-7.93
| -0.0200 0.1500 Tower Offsets
| -0.2800 A:0.00 b:0.00 C:0.00
| -0.0300 -0.0300 I:0.00 J:0.00 K:0.00
| -0.1900 Delta Radius: 66.0000
| X-Tower Y-Tower Diagonal Rod: 154.0000
Checking delta radius
Adjusting Delta Radius
x:-0.0600 (adj:-2.8000) y:-0.0300 (adj:-8.2800) z:-0.0500 (adj:-7.9800)
X=OK Y=OK Z=OK
c: -0.2000 delta radius:66.0000 prec:0.010 tries:0
done:false
x:0.0700 (adj:-2.7300) y:0.0900 (adj:-8.1900) z:0.0300 (adj:-7.9500)
X=OK Y=OK Z=OK
c: -0.2100 delta radius:66.2000 prec:0.010 tries:0
done:false
x:0.0600 (adj:-2.6700) y:0.0300 (adj:-8.1600) z:0.0600 (adj:-7.8900)
X=OK Y=OK Z=OK
c: -0.1500 delta radius:66.4000 prec:0.010 tries:0
done:false
x:0.0400 (adj:-2.6300) y:-0.0100 (adj:-8.1700) z:0.0300 (adj:-7.8600)
X=OK Y=OK Z=OK
c: -0.0800 delta radius:66.6000 prec:0.010 tries:1
done:false
x:0.0300 (adj:-2.6000) y:0.0400 (adj:-8.1300) z:0.0600 (adj:-7.8000)
X=OK Y=OK Z=OK
c: 0.0200 delta radius:66.8000 prec:0.010 tries:2
done:false
x:-0.0100 (adj:-2.6100) y:0.0200 (adj:-8.1100) z:-0.0200 (adj:-7.8200)
X=OK Y=OK Z=OK
c: -0.0900 delta radius:66.7000 prec:0.010 tries:3
done:false
x:-0.0000 (adj:-2.6100) y:-0.0000 (adj:-8.1100) z:-0.0000 (adj:-7.8200)
X=OK Y=OK Z=OK
c: -0.0500 delta radius:66.7500 prec:0.020 tries:0
done:false
x:0.0500 (adj:-2.5600) y:0.0100 (adj:-8.1000) z:0.0300 (adj:-7.7900)
X=OK Y=OK Z=OK
c: -0.0400 delta radius:66.8000 prec:0.020 tries:1
done:false
x:-0.0100 (adj:-2.5700) y:-0.0500 (adj:-8.1500) z:-0.0400 (adj:-7.8300)
X=OK Y=OK Z=OK
c: 0.0100 delta radius:66.8500 prec:0.020 tries:1
done:true
Iteration: 2
Checking/Adjusting endstop offsets
x:-0.0000 (adj:-2.5700) y:0.0300 (adj:-8.1200) z:0.0300 (adj:-7.8000)
X=OK Y=OK Z=OK
| Z-Tower Endstop Offsets
| 0.0100 X:-2.57 Y:-8.12 Z:-7.80
| 0.0100 0.1700 Tower Offsets
| 0.0000 A:0.00 b:0.00 C:0.00
| 0.0200 -0.0200 I:0.00 J:0.00 K:0.00
| -0.1900 Delta Radius: 66.8500
| X-Tower Y-Tower Diagonal Rod: 154.0000
Checking for tower geometry errors..
x_diff = 0.15000
y_diff = 0.03000
z_diff = 0.20000
high_diff = 0.20000
xy_equal = false
xz_equal = true
yz_equal = false
Opp Range = 0.36000
t1:Err t2:OK t3:Err
Tower geometry OK
Checking DiagRod Length
target:0.0033 c:0.0000 adj:0.00000
| Z-Tower Endstop Offsets
| -0.0000 X:-2.57 Y:-8.12 Z:-7.80
| 0.0400 0.2000 Tower Offsets
| -0.0000 A:0.00 b:0.00 C:0.00
| -0.0100 -0.0000 I:0.00 J:0.00 K:0.00
| -0.2000 Delta Radius: 66.8500
| X-Tower Y-Tower Diagonal Rod: 154.0000
Iteration: 3
Checking/Adjusting endstop offsets
x:-0.0100 (adj:-2.5800) y:0.0300 (adj:-8.0900) z:0.0300 (adj:-7.7700)
X=OK Y=OK Z=OK
| Z-Tower Endstop Offsets
| -0.0300 X:-2.58 Y:-8.09 Z:-7.77
| 0.0300 0.1400 Tower Offsets
| -0.0200 A:0.00 b:0.00 C:0.00
| 0.0100 -0.0400 I:0.00 J:0.00 K:0.00
| -0.2200 Delta Radius: 66.8500
| X-Tower Y-Tower Diagonal Rod: 154.0000
Checking for tower geometry errors..
x_diff = 0.13000
y_diff = 0.07000
z_diff = 0.19000
high_diff = 0.19000
xy_equal = true
xz_equal = true
yz_equal = false
Opp Range = 0.36000
t1:Err t2:OK t3:Err
Tower geometry OK
Checking DiagRod Length
target:-0.0033 c:-0.0200 adj:-0.20000
target:0.2133 c:0.2000 adj:-0.20000
target:0.4267 c:0.4000 adj:-0.20000
target:0.6233 c:0.6200 adj:0.00000
Diag Rod Length changed .. Homing Endstops
| Z-Tower Endstop Offsets
| -0.4600 X:-2.58 Y:-8.09 Z:-7.77
| -0.4000 -0.2900 Tower Offsets
| -0.4600 A:0.00 b:0.00 C:0.00
| -0.4500 -0.5200 I:0.00 J:0.00 K:0.00
| -0.6900 Delta Radius: 66.8500
| X-Tower Y-Tower Diagonal Rod: 153.4000
Iteration: 17
Checking/Adjusting endstop offsets
x:0.0100 (adj:-3.0300) y:0.0300 (adj:-8.5000) z:0.0100 (adj:-8.2300)
X=OK Y=OK Z=OK
| Z-Tower Endstop Offsets
| -0.0300 X:-3.03 Y:-8.50 Z:-8.23
| 0.0400 0.1200 Tower Offsets
| -0.0300 A:0.00 b:0.00 C:0.00
| 0.0100 -0.0600 I:0.00 J:0.00 K:0.00
| -0.2600 Delta Radius: 66.8500
| X-Tower Y-Tower Diagonal Rod: 153.3453
Checking for tower geometry errors..
x_diff = 0.11000
y_diff = 0.10000
z_diff = 0.23000
high_diff = 0.23000
xy_equal = true
xz_equal = false
yz_equal = false
Opp Range = 0.38000
Tower 3 has largest error
t1:Err t2:Err t3:Err
Tower3 Error: Adjusting
tower: -0.0400 opptower:-0.2700 tower radius adj:0.0000
done:false
x:0.0000 (adj:-3.0300) y:0.0000 (adj:-8.5000) z:-0.0600 (adj:-8.2900)
X=OK Y=OK Z=OK
tower: -0.0700 opptower:-0.1300 tower radius adj:-1.0000
done:false
x:-0.0600 (adj:-3.0900) y:-0.0900 (adj:-8.5900) z:-0.0900 (adj:-8.3800)
X=OK Y=OK Z=OK
tower: -0.0900 opptower:0.0900 tower radius adj:-2.0000
done:false
x:-0.0500 (adj:-3.1400) y:-0.0400 (adj:-8.6300) z:-0.0700 (adj:-8.4500)
X=OK Y=OK Z=OK
tower: 0.0400 opptower:0.0500 tower radius adj:-1.5000
done:true
Tower Postions changed .. Homing Endstops
| Z-Tower Endstop Offsets
| 0.6400 X:-3.14 Y:-8.63 Z:-8.45
| 0.3300 0.4500 Tower Offsets
| 0.0900 A:0.00 b:0.00 C:0.00
| 0.0900 0.0100 I:0.00 J:0.00 K:-1.50
| -0.0200 Delta Radius: 66.8500
| X-Tower Y-Tower Diagonal Rod: 153.3453
Iteration: 18
Checking/Adjusting endstop offsets
x:0.1000 (adj:-3.0400) y:0.0600 (adj:-8.5700) z:0.6500 (adj:-7.8000)
X=OK Y=OK Z=ERROR
x:-0.0500 (adj:-3.0900) y:-0.0400 (adj:-8.6100) z:0.0600 (adj:-7.7400)
X=OK Y=OK Z=OK
| Z-Tower Endstop Offsets
| -0.0000 X:-3.09 Y:-8.61 Z:-7.74
| -0.0600 0.0200 Tower Offsets
| -0.1100 A:0.00 b:0.00 C:0.00
| -0.0000 -0.0700 I:0.00 J:0.00 K:-1.50
| 0.0200 Delta Radius: 66.8500
| X-Tower Y-Tower Diagonal Rod: 153.3453
Checking delta radius
Adjusting Delta Radius
x:-0.0200 (adj:-3.1100) y:-0.0300 (adj:-8.6400) z:0.0200 (adj:-7.7200)
X=OK Y=OK Z=OK
c: -0.1100 delta radius:66.8500 prec:0.010 tries:0
done:false
x:0.0500 (adj:-3.0600) y:0.0400 (adj:-8.6000) z:0.0100 (adj:-7.7100)
X=OK Y=OK Z=OK
c: -0.0400 delta radius:67.0500 prec:0.010 tries:1
done:false
x:0.0400 (adj:-3.0200) y:0.0800 (adj:-8.5200) z:0.0600 (adj:-7.6500)
X=OK Y=OK Z=OK
c: -0.0000 delta radius:67.2500 prec:0.010 tries:1
done:true
Iteration: 19
Checking/Adjusting endstop offsets
x:-0.0000 (adj:-3.0200) y:-0.0200 (adj:-8.5400) z:0.0100 (adj:-7.6400)
X=OK Y=OK Z=OK
| Z-Tower Endstop Offsets
| -0.0200 X:-3.02 Y:-8.54 Z:-7.64
| -0.0600 0.0200 Tower Offsets
| 0.0000 A:0.00 b:0.00 C:0.00
| -0.0100 -0.0300 I:0.00 J:0.00 K:-1.50
| 0.0200 Delta Radius: 67.2500
| X-Tower Y-Tower Diagonal Rod: 153.3453
Autocalibration Complete
SENDING:M500
echo:Settings Stored
पूर्ण पुनर्गणना सूचीSENDING:G30 A
Starting Auto Calibration..
Calibration precision: +/-0.100mm
| Z-Tower Endstop Offsets
| -0.1800 X:-3.02 Y:-8.54 Z:-7.64
| -0.3000 -0.1600 Tower Offsets
| -0.2200 A:0.00 b:0.00 C:0.00
| -0.2200 -0.2000 I:0.00 J:0.00 K:-1.50
| -0.1500 Delta Radius: 67.2500
| X-Tower Y-Tower Diagonal Rod: 153.3453
Iteration: 1
Checking/Adjusting endstop offsets
x:-0.2100 (adj:-3.2300) y:-0.2000 (adj:-8.7400) z:-0.1700 (adj:-7.8100)
X=ERROR Y=ERROR Z=ERROR
x:0.0100 (adj:-3.2200) y:0.0100 (adj:-8.7300) z:-0.0200 (adj:-7.8300)
X=OK Y=OK Z=OK
| Z-Tower Endstop Offsets
| 0.0200 X:-3.22 Y:-8.73 Z:-7.83
| -0.1000 0.0300 Tower Offsets
| 0.0000 A:0.00 b:0.00 C:0.00
| -0.0200 -0.0300 I:0.00 J:0.00 K:-1.50
| 0.0100 Delta Radius: 67.2500
| X-Tower Y-Tower Diagonal Rod: 153.3453
Autocalibration Complete