शुभ दोपहर, हेबर के प्रिय पाठकों! रास्पबेरी पाई पर आरओएस के व्यावहारिक उपयोग के बारे में लेखों की श्रृंखला में यह दूसरा लेख है। श्रृंखला के पहले लेख में , मैंने आवश्यक आरओएस घटकों को स्थापित करने और काम के लिए काम के माहौल को स्थापित करने का वर्णन किया।श्रृंखला के दूसरे भाग में, हम रास्पबेरी पाई प्लेटफॉर्म पर आरओएस विशेषताओं का व्यावहारिक उपयोग शुरू करेंगे। विशेष रूप से, इस लेख में मैं रास्पबेरी पाई कैमरा बोर्ड का उपयोग करने के बारे में बात करने जा रहा हूं, जो कि रास्पबेरी पाई पर आरओएस के साथ मिलकर कंप्यूटर दृष्टि समस्याओं को हल करने के लिए। कौन रुचि रखता है, कृपया, बिल्ली के नीचे।कैमरा आरपीआई कैमरा बोर्ड
काम के लिए, हमें ऐसे रास्पबेरी पाई कैमरा बोर्ड कैमरे की आवश्यकता होगी: यह कैमरा सीधे बोर्ड पर एक सीएसआई कनेक्टर के माध्यम से जीपीयू से जुड़ता है, जो आपको प्रोसेसर समय का उपयोग किए बिना कैमरे से छवि रिकॉर्ड और एनकोड करने की अनुमति देता है। कैमरे को जोड़ने के लिए एक ZIF केबल का उपयोग किया जाता है। बोर्ड पर केबल कनेक्टर ईथरनेट और एचडीएमआई पोर्ट के बीच स्थित है:
कैमरे की आवश्यकता होगी: यह कैमरा सीधे बोर्ड पर एक सीएसआई कनेक्टर के माध्यम से जीपीयू से जुड़ता है, जो आपको प्रोसेसर समय का उपयोग किए बिना कैमरे से छवि रिकॉर्ड और एनकोड करने की अनुमति देता है। कैमरे को जोड़ने के लिए एक ZIF केबल का उपयोग किया जाता है। बोर्ड पर केबल कनेक्टर ईथरनेट और एचडीएमआई पोर्ट के बीच स्थित है: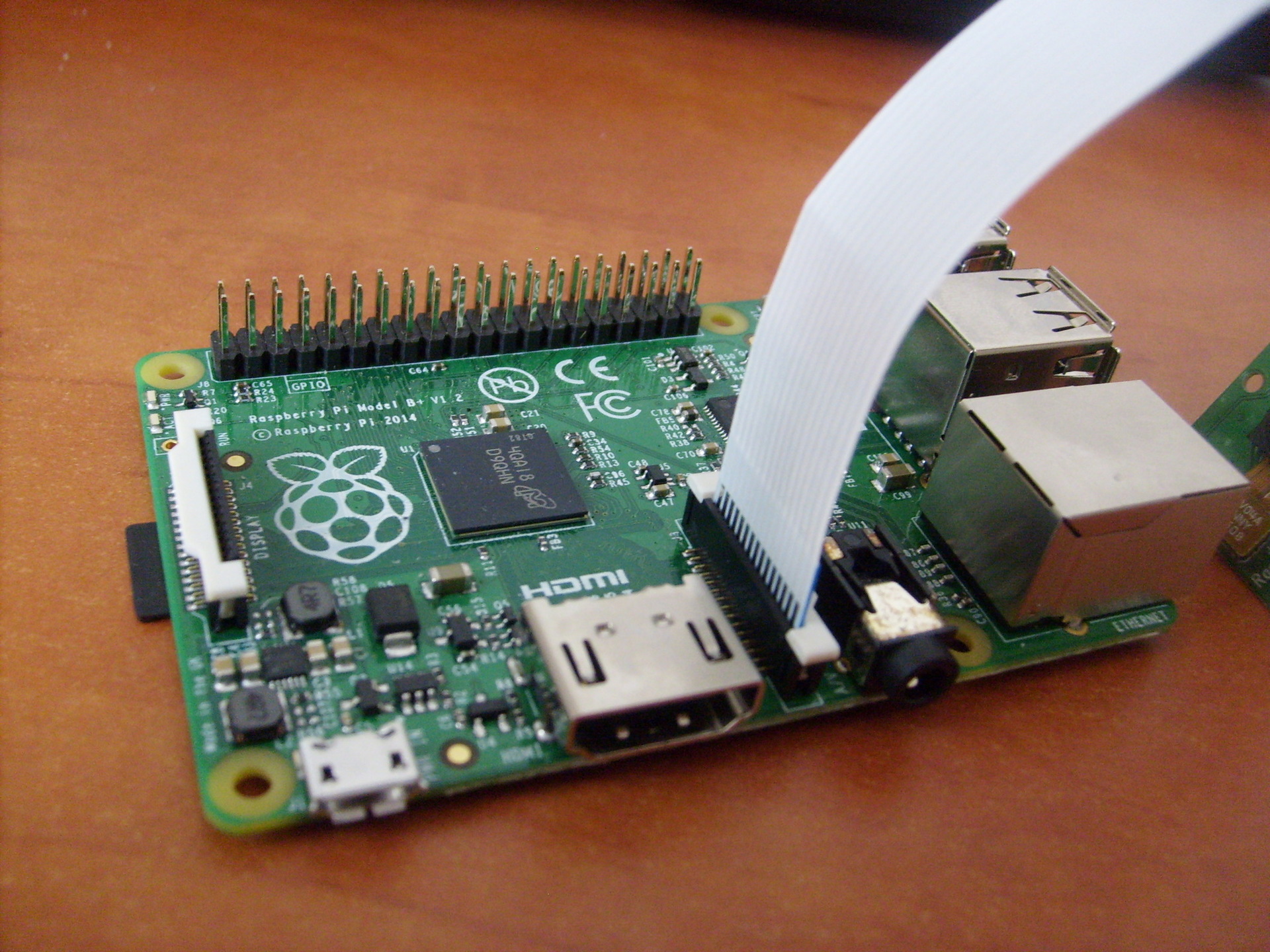
पुस्तकालय स्थापना
तो चलो आवश्यक पुस्तकालयों को स्थापित करने के लिए आगे बढ़ें। सबसे पहले, OpenCV स्थापित करें:$ sudo apt-get install libopencv-dev
रास्पबेरी पाई कैमरा का उपयोग करने के लिए, हमें रास्पिकैम लाइब्रेरी की आवश्यकता होगी। संग्रह को यहाँ से डाउनलोड करें ।अगला, लाइब्रेरी स्थापित करें:$ tar xvzf raspicamxx.tgz
$ cd raspicamxx
$ mkdir build
$ cd build
$ cmake ..
$ make
$ sudo make install
$ sudo ldconfig
आपको रासबी-विन्यास कार्यक्रम के माध्यम से रास्पियन में कैमरा समर्थन को सक्षम करने की आवश्यकता है:$ sudo raspi-config
विकल्प 5 चुनें - कैमरा सक्षम करें, चयन सहेजें और सिस्टम को रिबूट करें।आरओएस के साथ शुरू हो रही है
सुविधा के लिए, हमारे पैकेज के लिए एक नई कैटकिन कार्यशाला बनाएं:$ mkdir -p ~/driverobot_ws/src
$ cd ~/driverobot_ws/src
$ catkin_init_workspace
$ cd ~/driverobot_ws
$ catkin_make
एक नया ROS पैकेज बनाएँ:$ cd src/
$ catkin_create_pkg raspi_cam_ros image_transport cv_bridge roscpp std_msgs sensor_msgs compressed_image_transport opencv2
Catkin_create_pkg कमांड का विनिर्देश निम्नानुसार है: catkin_create_pkg <package_name> [depend1] [depend2],जहां आप लाइब्रेरी के तहत कोई भी निर्भरता निर्दिष्ट कर सकते हैं - वे लाइब्रेरी जो पैकेज का उपयोग करेंगी।यह कमांड ROS प्रोजेक्ट की रूपरेखा बनाता है: नोड स्क्रिप्ट और CMakeLists.txt और package.xml कॉन्फ़िगरेशन फ़ाइलों के लिए एक खाली src निर्देशिका।मुझे एक सरल स्क्रिप्ट मिली जो कैमरे से फ्रेम प्राप्त करती है और "प्रकाशक" (प्रकाशक) का उपयोग करके उन्हें प्रकाशित करती है, और इसे आरओएस इंडिगो के लिए अनुकूलित किया। आप इसे यहाँ से डाउनलोड कर सकते हैं ।इसका उपयोग करने के लिए, आपको रास्पबेरी पाई UV4L कैमरा ड्राइवर स्थापित करने की आवश्यकता है:$ curl http://www.linux-projects.org/listing/uv4l_repo/lrkey.asc | sudo apt-key add -
निम्न पंक्ति को /etc/apt/source.list फ़ाइल में जोड़ेंdeb http://www.linux-projects.org/listing/uv4l_repo/raspbian/ wheezy main
संकुल को अद्यतन करें और स्थापित करें:$ sudo apt-get update
$ sudo apt-get install uv4l uv4l-raspicam
ड्राइवर को डाउनलोड करने के लिए, प्रत्येक सिस्टम बूट पर, हम एक वैकल्पिक पैकेज भी स्थापित करते हैं:$ sudo apt-get install uv4l-raspicam-extras
पैकेज को संपादित करने के लिए आगे बढ़ते हैं। यहां से लाइनों को अपनी CMakeLists.txt फ़ाइल में पेस्ट करें ।CMakeLists.txt फ़ाइल में सबसे महत्वपूर्ण लाइनें:link_directories(/usr/lib/uv4l/uv4lext/armv6l/)
…
target_link_libraries(capture ${catkin_LIBRARIES} uv4lext)
इस प्रकार, हम uv4l ड्राइवर के लिए एक लिंक जोड़ते हैं, जो पैकेज को संकलित करने के लिए आवश्यक है।फ़ाइल के अंत में, हम अपने नोड के लिए विशेष लाइनें निर्धारित करते हैं:add_executable(capture src/capturer.cpp)
target_link_libraries(capture ${catkin_LIBRARIES} uv4lext)
Add_executable लाइन लॉन्च के लिए एक बाइनरी बनाता है और target_link_lbraries कैप्चर बाइनरी के लिए अतिरिक्त लाइब्रेरी जोड़ता है। यहाँ सेलापता लाइनों को पैकेज में भरें। xml फ़ाइल ताकि यह इस तरह दिखे:<?xml version="1.0"?>
<package>
<name>raspi_cam_ros</name>
<version>0.0.0</version>
<description>The raspi_cam_ros package</description>
<maintainer email="pi@todo.todo">pi</maintainer>
<license>TODO</license>
<buildtool_depend>catkin</buildtool_depend>
<build_depend>cv_bridge</build_depend>
<build_depend>image_transport</build_depend>
<build_depend>roscpp</build_depend>
<build_depend>std_msgs</build_depend>
<build_depend>sensor_msgs</build_depend>
<build_depend>opencv2</build_depend>
<build_depend>compressed_image_transport</build_depend>
<run_depend>cv_bridge</run_depend>
<run_depend>image_transport</run_depend>
<run_depend>roscpp</run_depend>
<run_depend>std_msgs</run_depend>
<run_depend>sensor_msgs</run_depend>
<run_depend>opencv2</run_depend>
<run_depend>compressed_image_transport</run_depend>
</package>
पहली पंक्तियों में, नोड के मूल पैरामीटर सेट किए गए हैं - नाम, संस्करण, विवरण, लेखक के बारे में जानकारी। Build_depend की रेखाएँ पैकेज को संकलित करने के लिए आवश्यक लाइब्रेरी निर्भरताएँ निर्धारित करती हैं, और run_d निर्भर लाइनें पैकेज में कोड को चलाने के लिए आवश्यक निर्भरताएँ निर्धारित करती हैं।Src फ़ोल्डर के अंदर एक कैप्चरकॉपर फ़ाइल बनाएँ और यहाँ से लाइनें चिपकाएँ । यहाँ मुख्य () विधि में, नोड को इनिशियलाइज़ किया गया है और एक लूप में शुरू किया गया है:ros::init(argc, argv,"raspi_cam_ros");
ros::NodeHandle n;
UsbCamNode a(n);
a.spin();
स्क्रिप्ट का पूरा तर्क यह है कि हमें ओपनसीवी का उपयोग करके कैमरे से चित्र मिलता है, इसे भरण विधि में आरओएस के लिए एक संदेश में लपेटें और इसे विषय पर प्रकाशित करें। यहां "प्रकाशक" चित्र बनाने के लिए image_transport पैकेज का उपयोग किया जाता है।कमांड चलाकर uv4l ड्राइवर लॉन्च करें:$ uv4l --driver raspicam --auto-video_nr --width 640 --height 480 --nopreview
क्या MJPEG स्ट्रीमिंग बनाएगा।हमारे ROS नोड संकलित करें:$ roscore
$ cd ~/driverobot_ws
$ catkin_make
ROS_PACKAGE_PATH चर का मान जांचें:echo $ROS_PACKAGE_PATH
/opt/ros/indigo/share:/opt/ros/indigo/stacks
ROS_PACKAGE_PATH वैरिएबल के मान में हमारे कार्यक्षेत्र के लिए पथ शामिल होना चाहिए। हमारे कार्यशाला स्थान को पथ में जोड़ें:$ source devel/setup.bash
अब प्रतिध्वनि $ ROS_PACKAGE_PATH कमांड को चलाने पर हमें एक समान आउटपुट देखना चाहिए:/home/youruser/catkin_ws/src:/opt/ros/indigo/share:/opt/ros/indigo/stacks
, जहां / घर / <user_name> / catkin_ws / src हमारे कार्यक्षेत्र का मार्ग है। इसका मतलब यह है कि ROS कैटकिन_व्स में बनाए गए हमारे नोड्स को "देख" सकते हैं और हम उन्हें रोज़्रन के माध्यम से चला सकते हैं।हमारे ROS नोड चलाएँ:$ rosrun raspi_cam_ros capture
विषय से वीडियो स्ट्रीम प्रदर्शित करने के लिए आलेखीय प्रोग्राम rqt_image_view को चलाएं:$ rosrun rqt_image_view rqt_image_view
Rqt_image_view विंडो में image_raw विषय का चयन करें। नोड शुरू करते समय, त्रुटि "Gtk-WARNING **: प्रदर्शन नहीं खोल सकता है: -1 ssh या" GdkGLExtxt- चेतावनी **: के माध्यम से काम करते समय हो सकता है ** विंडो सिस्टम OpenGL का समर्थन नहीं करता है। " जब VNC रिमोट डेस्कटॉप मोड में चल रहा हो। समाधान SS11 के माध्यम से रास्पबेरी पाई को X11 अग्रेषण से जोड़ने के लिए है:
नोड शुरू करते समय, त्रुटि "Gtk-WARNING **: प्रदर्शन नहीं खोल सकता है: -1 ssh या" GdkGLExtxt- चेतावनी **: के माध्यम से काम करते समय हो सकता है ** विंडो सिस्टम OpenGL का समर्थन नहीं करता है। " जब VNC रिमोट डेस्कटॉप मोड में चल रहा हो। समाधान SS11 के माध्यम से रास्पबेरी पाई को X11 अग्रेषण से जोड़ने के लिए है:$ ssh -X pi@<host_pi>
आप पा सकते हैं कि रोस्टोपिक कमांड का उपयोग करके विषय पर कितनी बार पोस्ट किए गए हैं:rostopic hz image_raw
यह कमांड प्रत्येक सेकंड में प्रति विषय संदेश प्राप्त करने की आवृत्ति की गणना करता है और इसे कंसोल में प्रदर्शित करता है।मॉडल बी + के लिए, मेरे पास इस तरह एक निष्कर्ष था:average rate: 7.905
min: 0.075s max: 0.249s std dev: 0.02756s
जैसा कि आप देख सकते हैं, पोस्टिंग की आवृत्ति 8 हर्ट्ज है।मैंने आरपीआई 2 मॉडल पर कैमरे से चित्र प्रकाशित करने की आवृत्ति भी जांची। यहां परिणाम कई गुना बेहतर थे:average rate: 30.005
min: 0.024s max: 0.043s std dev: 0.00272s
संदेश पहले से ही 30 हर्ट्ज की आवृत्ति पर प्रकाशित होते हैं, जो कि बी + मॉडल की तुलना में गति में काफी अच्छी वृद्धि है।OpenCV और ROS के साथ दृश्य-आधारित रोबोट नियंत्रण
अब हम रास्पबेरी पाई के साथ एक रोबोट पर कंप्यूटर दृष्टि का उपयोग करने के लिए एक छोटा सा आरओएस पैकेज लिखेंगे, जो कि मान्यता एल्गोरिथ्म (हमारे मामले में, निम्नलिखित विधि का उपयोग करके दृश्य अभिविन्यास) करेगा और विषय के लिए आवश्यक रोबोट ऑफसेट के मूल्य को प्रकाशित करेगा। दूसरी ओर, रोबोट गति नियंत्रण नोड इस विषय की सदस्यता लेगा और Arduino को गति नियंत्रण आदेश भेजेगा।अब कैप्चरकैप स्क्रिप्ट में एक "प्रकाशक" जोड़ें, जो शिफ्ट वैल्यू प्रकाशित करेगा। सबसे पहले, शिफ्ट मान के लिए संदेश प्रकार की परिभाषा को सक्षम करें - std_msgs / Int16।#include <std_msgs/Int16.h>
rosserial विशेष संदेश संदेश फ़ाइलें लेता है और उनके लिए स्रोत कोड बनाता है। इस टेम्पलेट का उपयोग किया जाता है: मानक rosserial संदेशों के लिए स्रोत कोड ros_lib निर्देशिका के अंदर package_name फ़ोल्डर में संग्रहीत होता है। अगला, हम इस प्रकार के लिए संदेश को इनिशियलाइज़ करते हैं:package_name/msg/Foo.msg → package_name::Foo
std_msgs::Int16 shift_msg;
एक "प्रकाशक" बनाएँ:ros::Publisher shift_pub;
और UsbCamNode कंस्ट्रक्टर के अंदर हम इसे एक परिभाषा देते हैं:shift_pub = nh.advertise<std_msgs/Int16>(“line_shift”, 1);
यहां हम प्रकाशन के लिए संदेशों के प्रकार और विषय का नाम निर्धारित करते हैं।इसके बाद, OpenCV का उपयोग करके लाइन शिफ्ट मान की गणना करने के लिए तर्क जोड़ें और इसे #_dedef OUTPUT_ENABLED लाइन से पहले take_and_send_image () विधि में line_shift विषय पर प्रकाशित करें:
shift_msg.data = offset;
shift_pub.publish(shift_msg);
मेरे पास एक रेडीमेड लाइन-निम्नलिखित एल्गोरिथ्म नहीं है, इसलिए पाठक यहां अपना तर्क लिखने के लिए स्वतंत्र है।वास्तव में, संदेश में डेटा को डेटा फ़ील्ड में संग्रहीत किया जाता है। संदेश संरचना को कमांड का उपयोग करके देखा जा सकता है:$ rosmsg show std_msgs/Int16
अब नोड चलाएँ:$ rosrun raspi_cam_ros capturer
हम विषय पंक्ति_शिफ्ट पर प्रकाशित आउटपुट डेटा में रोस्टोपिक इको कमांड का उपयोग करते हैं:$ rostopic echo line_shift
अब रोबोट नियंत्रण नोड में एक "ग्राहक" जोड़ें। संदेश प्रकार की परिभाषा सक्षम करें:#include <std_msgs/UInt16.h>
फिर हम एक कॉलबैक फ़ंक्शन जोड़ते हैं जो विषय से एक संदेश प्राप्त होने पर निष्पादित होता है।void messageCb(const std_msgs::UInt16& message)
{
int shift_val = int(message.data);
char* log_msg;
if(shift_val < 0) log_msg = "Left";
else if(shift_val > 0 ) log_msg = "Right";
else log_msg = "Forward";
nh.loginfo(log_msg);
}
कॉलबैक फ़ंक्शन शून्य प्रकार का होना चाहिए और संदेश प्रकार के एक संदर्भ को तर्क के रूप में लेना चाहिए।सादगी के लिए, मैं लाइन ऑफ़सेट की दिशा के बारे में एक संदेश देता हूं। यहां आप अपने परिदृश्य के लिए अपना स्वयं का रोबोट गति तर्क जोड़ सकते हैं।विषय line_shift से संदेशों के लिए एक ग्राहक बनाएँ।ros::Subscriber<std_msgs::UInt16> sub("line_shift", &messageCb);
यहां हम विषय का नाम और कॉलबैक फ़ंक्शन का लिंक सेट करते हैं।आगे rosserial_arduino के लिए मानक स्केच विधियाँ आती हैं:void setup()
{
nh.initNode();
nh.subscribe(sub);
Serial.begin(57600);
}
void loop()
{
nh.spinOnce();
delay(100);
}
एकमात्र अंतर यह है कि हम विषय के लिए साइट की वास्तविक "सदस्यता" बनाने के लिए nh.subscribe (उप) जोड़ते हैं।रोबोट को नियंत्रित करने के लिए एक स्केच यहाँ से डाउनलोड किया जा सकता है ।छोटी चाल! आरओएस में, विशेष लॉन्च फाइलें हैं जो आपको कुछ मापदंडों के साथ स्वचालित रूप से अलग-अलग प्रक्रियाओं के रूप में नोड्स लॉन्च करने की अनुमति देती हैं। लॉन्च फाइलें xml प्रारूप में बनाई गई हैं और उनका सिंटैक्स आपको एक साथ कई नोड्स चलाने की अनुमति देता है। हालाँकि, लॉन्च फ़ाइल इस बात की गारंटी नहीं देती है कि निर्दिष्ट क्रम में नोड्स लॉन्च किए जाएंगे।आप शुरू करने के लिए आसान rosserial_python सर्वर बनाने के लिए एक लॉन्च फ़ाइल बना सकते हैं।$ cd <catkin_ws>/src
$ catkin_create_pkg rosserial_controller
$ cd src/rosserial_controller
$ vim rosserial_controller.launch
हम निम्न सामग्री के साथ लॉन्च फ़ाइल लिखते हैं:<launch>
<node pkg="rosserial_python" type="serial_node.py" name="arduino_serial">
<param name="port" value="/dev/ttyACM0"/>
</node>
</launch>
इसे संकलित करें और चलाएं:$ cd ~/<catkin_ws>
$ catkin_make
$ source devel/setup.bash
$ roslaunch rosserial_controller rosserial_controller.launch
हम rqt_plot उपयोगिता का उपयोग करके line_shift थीम में प्रकाशित मूल्यों की कल्पना कर सकते हैं, जैसा कि लेख में किया गया है :$ rqt_plot line_shift
अब आप रास्पबेरी पाई कैमरा और OpenCV लाइब्रेरी का पूरा लाभ अपने परिदृश्य में रोबोट, ऑब्जेक्ट मान्यता, ट्रैकिंग और कई अन्य लोगों के दृश्य उन्मुखीकरण के लिए ले सकते हैं। अपनी कल्पना को उजागर करें!अगली बार हम कीबोर्ड पर कुंजियों को दबाकर रोबोट को टेलीप्रेशन मोड में नियंत्रित करने की बात करेंगे।पुनश्च। नेटवर्क के पास उपयोगी चीट शीट हैं - आरओएस चीटशीट। आरओएस इंडिगो संस्करण के लिए, इसे यहां से डाउनलोड किया जा सकता है ।