शुभ दोपहर, हेबर के प्रिय पाठकों!मैं रास्पबेरी पाई ( पहला लेख , दूसरा लेख ) पर आरओएस के व्यावहारिक उपयोग के बारे में लेखों की एक श्रृंखला जारी रखता हूं ।इस लेख में, हम कीबोर्ड पर चाबियाँ दबाकर रोबोट को नियंत्रित करने के लिए ros-teleop स्टैक से teleop_twist_keyboard पैकेज का उपयोग करेंगे । Ros-teleop स्टैक में इस पैकेज के अलावा, विभिन्न नियंत्रण विधियों के लिए कई और पैकेज शामिल हैं, उदाहरण के लिए, जॉयस्टिक का उपयोग करना। कौन बिल्ली के नीचे, कृपया teleop_twist_keyboard अध्ययन शुरू करने के लिए तैयार है।Tmux के साथ बहुपरत
इस बीच, मैं आपको एक ट्रिक के बारे में बताना चाहता हूं जो आपको कई टर्मिनलों में एक ही समय में SSH के माध्यम से रास्पबेरी पाई पर दूरस्थ रूप से काम करने की अनुमति देता है। ऐसा करने के लिए, आरएमआई पर tmux उपयोगिता स्थापित करें।$ sudo apt-get install tmux
उसके बाद, उपयोगिता चलाएँ:$ tmux
टर्मिनल विंडो के नीचे एक हरे रंग की पट्टी दिखाई देनी चाहिए। खिड़की की संख्या 0.tmux एक बहुत ही सुविधाजनक टर्मिनल विंडो मैनेजर है जो आपको कई अलग-अलग तरीकों (अलग टर्मिनल विंडो (विंडो)), विंडो पैनल में रखकर एक टर्मिनल विंडो में किसी भी संख्या में विंडो बनाने की अनुमति देता है। फलक)) और उनके बीच स्विच करना सुविधाजनक है।कीबोर्ड पर Ctrl + B और C दबाएं। नंबर 1 के साथ एक और विंडो दिखनी चाहिए। Ctrl + B और% के संयोजन को भी आज़माएं। वर्तमान टर्मिनल विंडो को एक ऊर्ध्वाधर हरी पट्टी द्वारा दो खिड़कियों (फलक) में बीच में विभाजित किया जाएगा। यदि आप संयोजन Ctrl + B दबाते हैं, और "विभाजन विंडो" दर्ज करें, तो खिड़की क्षैतिज रूप से दो समान खिड़कियों में विभाजित हो जाएगी। एक पैनल (फलक) को हटाने के लिए, संयोजन Ctrl + B, X का उपयोग करें और फिर Y दबाएं। उसी विंडो में किसी अन्य पैनल पर स्विच करने के लिए, संयोजन Ctrl + B, O का उपयोग करें। विंडो नंबर द्वारा टर्मिनल विंडो के बीच स्विच करने के लिए, संयोजन Ctrl + का उपयोग करें बी, <विंडो नंबर>।अब जब आप एक नया टर्मिनल खोलते हैं तो प्रोग्राम के लॉन्च को ~ / .bashrc फ़ाइल में स्वचालित रूप से शुरू करने के लिए जोड़ दें। निम्न पंक्तियों को फ़ाइल में जोड़ें:[[ $TERM != "screen" ]] && exec tmux
Teleop_twist_keyboard के साथ काम करना
अब आइए teleop_twist_keyboard पैकेज से परिचित हों।Teleop_twist_keyboard.py स्क्रिप्ट को teleop_twist_keyboard पैकेज से एक नियमित ROS नोड के रूप में चलाएँ:$ roscore
$ rosrun teleop_twist_keyboard teleop_twist_keyboard.py
हमें इस तरह एक निष्कर्ष मिलता है:Reading from the keyboard and Publishing to Twist!
---------------------------
Moving around:
u i o
j k l
m , .
q/z : increase/decrease max speeds by 10%
w/x : increase/decrease only linear speed by 10%
e/c : increase/decrease only angular speed by 10%
anything else : stop
CTRL-C to quit
आइए वर्तमान में सक्रिय सभी विषयों को सूचीबद्ध करें:$ rostopic list
विषय / cmd_vel सूची में दिखाई देना चाहिए। इस विषय पर, teleop_twist_keyboard नोड कीबोर्ड पर हर बार एक कुंजी दबाने पर संदेश प्रकाशित करता है।हम विषय / cmd_vel में प्रकाशित संदेशों का आउटपुट दिखाते हैं:$ rostopic echo cmd_vel
आलेखीय रूप में ROS कम्प्यूटेड ग्राफ का प्रतिनिधित्व करने के लिए rqt_graph चलाएं। कम्प्यूटेशनल ग्राफ आरेख सभी सक्रिय नोड्स और विषयों को दर्शाता है जो उन्हें कनेक्ट करते हैं।$ rosrun rqt_graph rqt_graph
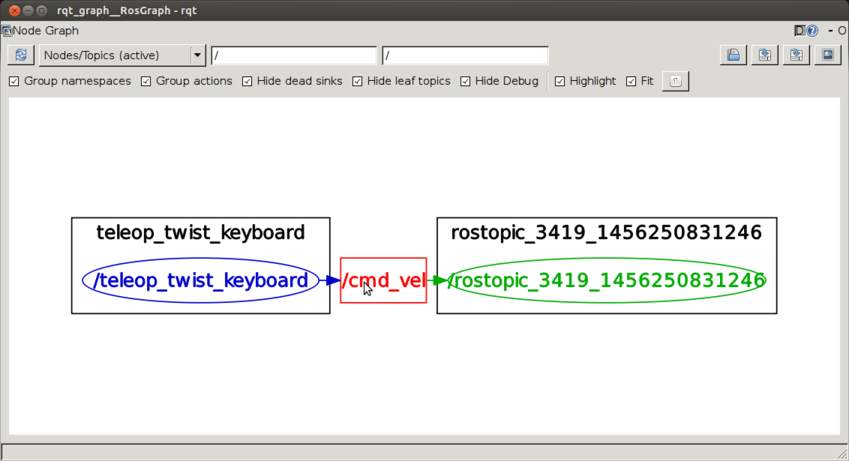 यहाँ हम देखते हैं कि teleop_twist_keyboard नोड विषय / cmd_vel को संदेश प्रकाशित करता है, और रोस्टोपिक नोड इस विषय (rostopic echo कमांड) की सदस्यता लेता है।आइए जानें कि किस विषय पर किस प्रकार के संदेश प्रकाशित होते हैं / cmd_vel:
यहाँ हम देखते हैं कि teleop_twist_keyboard नोड विषय / cmd_vel को संदेश प्रकाशित करता है, और रोस्टोपिक नोड इस विषय (rostopic echo कमांड) की सदस्यता लेता है।आइए जानें कि किस विषय पर किस प्रकार के संदेश प्रकाशित होते हैं / cmd_vel:$ rostopic type /cmd_vel
कमांड लाइन आउटपुट करेगी:geometry_msgs/Twist
इसका मतलब है कि संदेश मानक ROS पैकेज ज्यामिति_msgs से टाइप ट्विस्ट के हैं।हमें संदेश संरचना के बारे में rosmsg कमांड से भी जानकारी मिल सकती है:$ rosmsg show geometry_msgs/Twist
geometry_msgs/Vector3 linear
float64 x
float64 y
float64 z
geometry_msgs/Vector3 angular
float64 x
float64 y
float64 z
क्षेत्र 'रैखिक' रैखिक वेग के लिए जिम्मेदार है, 'कोणीय' कोणीय वेग के लिए है।'मैं' कुंजी दबाएं, आउटपुट इस तरह होगा (आगे बढ़ने से जुड़ा):linear:
x: 0.5
y: 0.0
z: 0.0
angular:
x: 0.0
y: 0.0
z: 0.0
---
'K' कुंजी दबाएं, आउटपुट इस तरह होगा (रोकें):linear:
x: 0.0
y: 0.0
z: 0.0
angular:
x: 0.0
y: 0.0
z: 0.0
---
'यू' कुंजी दबाएं, आउटपुट इस तरह होगा (बाएं मुड़ें):linear:
x: 0.5
y: 0.0
z: 0.0
angular:
x: 0.0
y: 0.0
z: 1.0
---
और अंत में, जब आप 'ओ' कुंजी दबाते हैं, तो हमें निम्नलिखित आउटपुट मिलते हैं (दाएं मुड़ें):linear:
x: 0.5
y: 0.0
z: 0.0
angular:
x: 0.0
y: 0.0
z: -1.0
---
कुंजियाँ 'j' और 'l', बाएँ और दाएँ मुड़ने के लिए ज़िम्मेदार हैं (बिना आगे बढ़े)।Teleop_twist_keyboard के साथ कीबोर्ड रोबोट नियंत्रण
मैंने पहले ही चाबियाँ दबाकर रोबोट को नियंत्रित करने के लिए रोसेरिशियल स्केच लिखा है। हम बस विषय / cmd_vel की सदस्यता लेते हैं और, प्रत्येक गति के प्राप्त मूल्य के आधार पर, गति नियंत्रक को आवश्यक आदेश देते हैं (आगे बढ़ना, रोकना, बाएं या दाएं मुड़ना)। स्केच यहाँ से डाउनलोड किया जा सकता है ।आइए स्केच कोड का अधिक विस्तार से विश्लेषण करें।फ़ाइल की शुरुआत में, मानक ros.h हैडर फ़ाइल के अलावा, हम दो अतिरिक्त फ़ाइलों को संदेश प्रकार geometry_msgs / Twist.h और geometry_msgs / वेक्टर3.h के साथ जोड़ते हैं:#include <geometry_msgs/Twist.h>
#include <geometry_msgs/Vector3.h>
हम एक नोड हैंडलर आरओ की घोषणा करते हैं :: NodeHandle:ros::NodeHandle nh;
मुख्य मूल्य संदेश विधि है:void messageCb(const geometry_msgs::Twist& message)
{
geometry_msgs::Vector3 linear = message.linear;
float forward_vel = float(linear.x);
if(forward_vel == 0) { stop(); return; }
geometry_msgs::Vector3 angular = message.angular;
float ang_vel = float(angular.z);
if(ang_vel > 0) { turnLeft(); }
else if(ang_vel < 0) { turnRight(); }
else { goForward(); }
}
इस विधि में, हम प्राप्त संदेश को cmd_vel विषय से संसाधित करते हैं। फॉरवर्ड_वेल वेरिएबल में हम लीनियर स्पीड, कोणीय वेरिएबल - कोणीय में रखते हैं। रैखिक गति हमें स्टॉप कमांड (मान 0) को ट्रैक करने की अनुमति देती है। कोणीय वेग रोटेशन की दिशा निर्धारित करता है (यदि 0 से अधिक है, तो बाएं मुड़ें, 0 से कम - दाईं ओर, यदि 0 - आगे बढ़ें)।विषय के लिए एक ग्राहक बनाएं / cmd_vel:ros::Subscriber<geometry_msgs::Twist> sub("/cmd_vel", &messageCb);
संदेश प्रसंस्करण विधि (संदेशसीबी) और प्राप्त संदेश के प्रकार के संदर्भ के साथ - ज्यामिति_msgs :: ट्विस्ट।स्क्रिप्ट के अंत में, rosserial_arduino के लिए मानक स्केच विधियों का पालन करें:nh.initNode();
nh.subscribe(sub);
Serial.begin(57600);
चलाएँ rosserial_arduino सर्वर:$ rosrun rosserial_python serial_node _port:=/dev/ttyACM0
और Arduino बोर्ड को स्केच अपलोड करें।उस टर्मिनल पर स्विच करें जहां teleop_twist_keyboard नोड चल रहा है, कुंजी 'u', 'i', 'o' और 'k' दबाकर देखें और टर्मिनल में rosserial सर्वर के आउटपुट की जांच करें।इस प्रकार, teleop_twist_keyboard पैकेज का उपयोग करके, हम अब आंदोलन कमांड को ट्रांसमिट करके रोबोट का सरल रिमोट कंट्रोल कर सकते हैं: आगे बढ़ना, रुकना, बाएं या दाएं मुड़ना। भविष्य में, हम सीखेंगे कि जॉयस्टिक का उपयोग करके रोबोट को कैसे नियंत्रित किया जाए, जो आरओएस में एक और पैकेज का उपयोग करके अधिक सुविधाजनक है। लेकिन उस पर अगले लेख में।