SCARA यांत्रिकी पर घर का बना 3D प्रिंटर, v3
SCARA यांत्रिकी पर घर का बना 3D प्रिंटर, v3
100+ मिमी / सेकंड की गति से काम v3 का वीडियो।V1 और v2 के पिछले संस्करण
पिछले प्रिंटर के बारे में विवरण यहां पाया जा सकता है ।वीडियो प्रिंट पिछला संस्करण
OpenScad में पिछले यांत्रिकी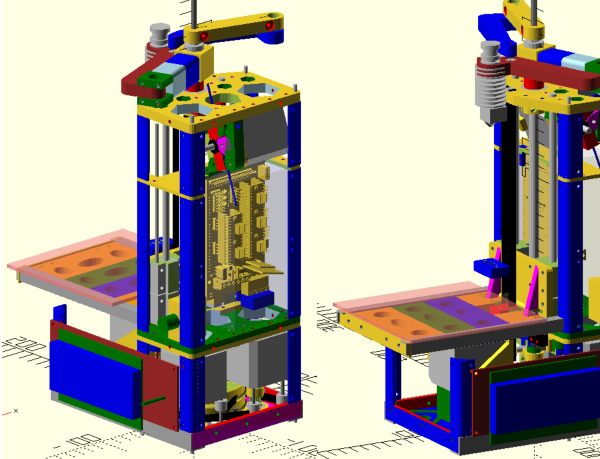 इस तरह के यांत्रिकी के साथ बहुत अच्छा नहीं था:
इस तरह के यांत्रिकी के साथ बहुत अच्छा नहीं था:- 30 m5 ID:6 OD:8 , 30 0.5 —
- —
- — ( Mega) 50 /
- Z — 2 v1,
V3
वी 2 संस्करण विफल हो गया - मैंने भी इस दिशा को छोड़ने और सामान्य सरल यांत्रिकी को इकट्ठा करने के बारे में सोचा था, लेकिन कुछ असामान्य करने की इच्छा ने मुझे आराम नहीं दिया।दरअसल, कई दिनों के प्रतिबिंब के बाद, मैंने फैसला किया कि मैं SCARA मैकेनिक के निर्देशन में काम करना जारी रखूंगा।हाथ यांत्रिकी - क्लासिक SCARA में, मोटरों में से एक पहले हाथ के अंत में खड़ा है, यह हाथ को बाहर ले जाने और हाथ की कठोरता के लिए आवश्यकताओं को जोड़ता है, मैं वास्तव में इससे बचना चाहता था, v1 और v2 ने इस समस्या को हल किया, v8 के लिए एक लीवर और छोटी पट्टियों द्वारा हल किया गया है।वीडियो (बहुत कम) यह कैसे काम करता हैहोमिंग के लिए, प्रत्येक लीवर के लिए माइक्रोवॉच्स जेड अक्ष जोड़ा गया था - इस बार मैंने फैसला किया कि मेरे पास एक स्थिर मंच होगा और यांत्रिकी खुद जेड के साथ आगे बढ़ेंगे, कई फायदे हैं:अनुभागीय दृश्य (होम स्विच के बिना)
जेड अक्ष जोड़ा गया था - इस बार मैंने फैसला किया कि मेरे पास एक स्थिर मंच होगा और यांत्रिकी खुद जेड के साथ आगे बढ़ेंगे, कई फायदे हैं:अनुभागीय दृश्य (होम स्विच के बिना) Z मिनट स्विच
Z मिनट स्विच सभी इकट्ठे
सभी इकट्ठे इलेक्ट्रॉनिक्स - इस बार मैंने इलेक्ट्रॉनिक्स (रैंप्स 1.4 + DRV + LCD2004) को एक अलग इकाई में रखने का फैसला किया - वह भी एक कारण के लिए - प्रिंटर के तीसरे असेंबली / डिससेप्शन के बाद मैं यह करने से थक गया था और मैं मैंने एक बॉक्स बनाया जो एक परियोजना से दूसरी परियोजना में भटकता रहेगा (मुझे बस फर्मवेयर को अपने आप से बदलने की आवश्यकता है)एक्सट्रूडर - चूंकि मैकेनिक्स ने 100+ की गति से एक साधारण एक्सट्रूडर को ड्राइव करना संभव बना दिया था, इसलिए मुझे गियर वाली एक्सट्रूडर डिजाइन करना पड़ा।OpenScad फ़ाइलें (scarav3.scad)फ़र्मवेयर
इलेक्ट्रॉनिक्स - इस बार मैंने इलेक्ट्रॉनिक्स (रैंप्स 1.4 + DRV + LCD2004) को एक अलग इकाई में रखने का फैसला किया - वह भी एक कारण के लिए - प्रिंटर के तीसरे असेंबली / डिससेप्शन के बाद मैं यह करने से थक गया था और मैं मैंने एक बॉक्स बनाया जो एक परियोजना से दूसरी परियोजना में भटकता रहेगा (मुझे बस फर्मवेयर को अपने आप से बदलने की आवश्यकता है)एक्सट्रूडर - चूंकि मैकेनिक्स ने 100+ की गति से एक साधारण एक्सट्रूडर को ड्राइव करना संभव बना दिया था, इसलिए मुझे गियर वाली एक्सट्रूडर डिजाइन करना पड़ा।OpenScad फ़ाइलें (scarav3.scad)फ़र्मवेयरपरिणाम
मैं परिणाम से संतुष्ट हूं, इस प्रिंटर पर प्रिंट की गुणवत्ता मुझे सूट करती है।समस्याओं में से, यह ध्यान दिया जा सकता है कि XY कुल्हाड़ियों के साथ एक छोटी सी लहर है (चरणों की असंतोष के कारण और विभाजित चरणों की संख्या - अब 50)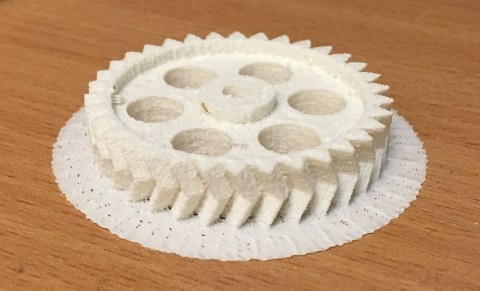 आगे के विचार:
आगे के विचार:- ग्रेटर अंतरण अनुपात कम से कम x5 (अब x4)
- हाथों का वजन कम करना और उनकी कठोरता बढ़ाना - मैं एल्यूमीनियम का बनाऊंगा
- E3D v6 - वजन में कमी
- छोटे कदम - 4kg * सेमी पर वर्तमान वाले थोड़ा बेमानी हैं
- Ptfe ट्यूब की लंबाई को कम करना एक बहुत महत्वपूर्ण संकेतक है जो प्रत्यक्ष एक्सट्रूडर के लिए नहीं है - हाथों के रोटेशन के अक्ष पर एक्सट्रूडर को लटकाए जाने का एक विचार भी है - यह काम करेगा यदि पिछले बिंदु पूरा हो गया है
- डाउनसाइजिंग - ऊंचाई सर्वोच्च प्राथमिकता है
Source: https://habr.com/ru/post/hi393593/
All Articles