रूस के खेतों पर मानव रहित ट्रैक्टर का परीक्षण किया गया
 रूसी कंपनी कॉग्निटिव टेक्नोलॉजीज ने तातारस्तान में अपने स्वयं के डिजाइन की एक कंप्यूटर दृष्टि प्रणाली के साथ मानव रहित ट्रैक्टरों का पहला परीक्षण किया। हार्डवेयर और सॉफ्टवेयर कॉम्प्लेक्स को भविष्य में न केवल ट्रैक्टरों पर, बल्कि अन्य कृषि उपकरणों - कंबाइन, सीडर्स और इतने पर स्थापित करने की योजना है, इज़वेस्टिया लिखते हैं ।मानव रहित वाहनों और कंप्यूटर विज़न सिस्टम के लिए धन्यवाद, रूसी फ़ार्म अपनी लाभप्रदता को बढ़ाने में सक्षम होंगे, क्योंकि अब महंगे उपकरणों का अकुशल रूप से उपयोग किया जाता है। उदाहरण के लिए, हारवेस्टर दिन में औसतन छह घंटे काम करता है, और बाकी समय यह बेकार है। मानव रहित ट्रैक्टर और कंबाइन खेतों में दिन और रात, 24 घंटे काम करेंगे। उन्हें खराब दृश्यता की स्थिति, बारिश या कोहरे से नहीं रोका जाएगा, और यहां तक कि पिच के अंधेरे में, एक मानव रहित ट्रैक्टर दिन के दौरान प्रभावी ढंग से घास या आलू लेने में सक्षम है।रूस में मानव रहित कृषि उपकरण को एक नई कृषि होल्डिंग कंपनी द्वारा बढ़ावा दिया जाएगा, जो कि संज्ञानात्मक टेक्नोलॉजीज कृषि उपकरण निर्माता रोस्टेल्मैश और कृषि होल्डिंग सोयूज-एग्रो के साथ इन्नोपोलिस विशेष आर्थिक क्षेत्र के आधार पर बनाती है।पूर्ण अंधेरे में, मानवरहित प्रणालियों के लिए, आप नाइट विज़न कैमरों का उपयोग कर सकते हैं, लेकिन यह क्षेत्र के पूर्व-चिह्नित नक्शे के साथ लिडार का उपयोग करने के लिए अधिक प्रभावी है, जो कि ट्रैक्टर के नेविगेशन कंप्यूटर में सूचीबद्ध है। अमेरिकी सहयोगियों ने हाल ही में एक मानव रहित ऑटोमोबाइल वाहन प्रणाली का पूरी तरह से अंधेरे में परीक्षण किया - और यह निर्धारित किया कि नाविक के साथ एक लिडार अंधेरे में एक कार को नियंत्रित करता है जो एक मानव चालक की तुलना में अधिक सुरक्षित है।एरिज़ोना के एक प्रशिक्षण मैदान में मानव रहित फोर्ड के परीक्षण के दौरान, क्षेत्र का एक 3 डी मानचित्र बनाया गया था, और अंधेरे में लेजर दालों (2.8 मिलियन दालों प्रति सेकंड) का उपयोग करने वाले लिडार ने मार्ग को प्रशस्त किया, जैसे कि 3 डी मानचित्र के लिए अभिविन्यास के साथ सड़क की जांच करना।
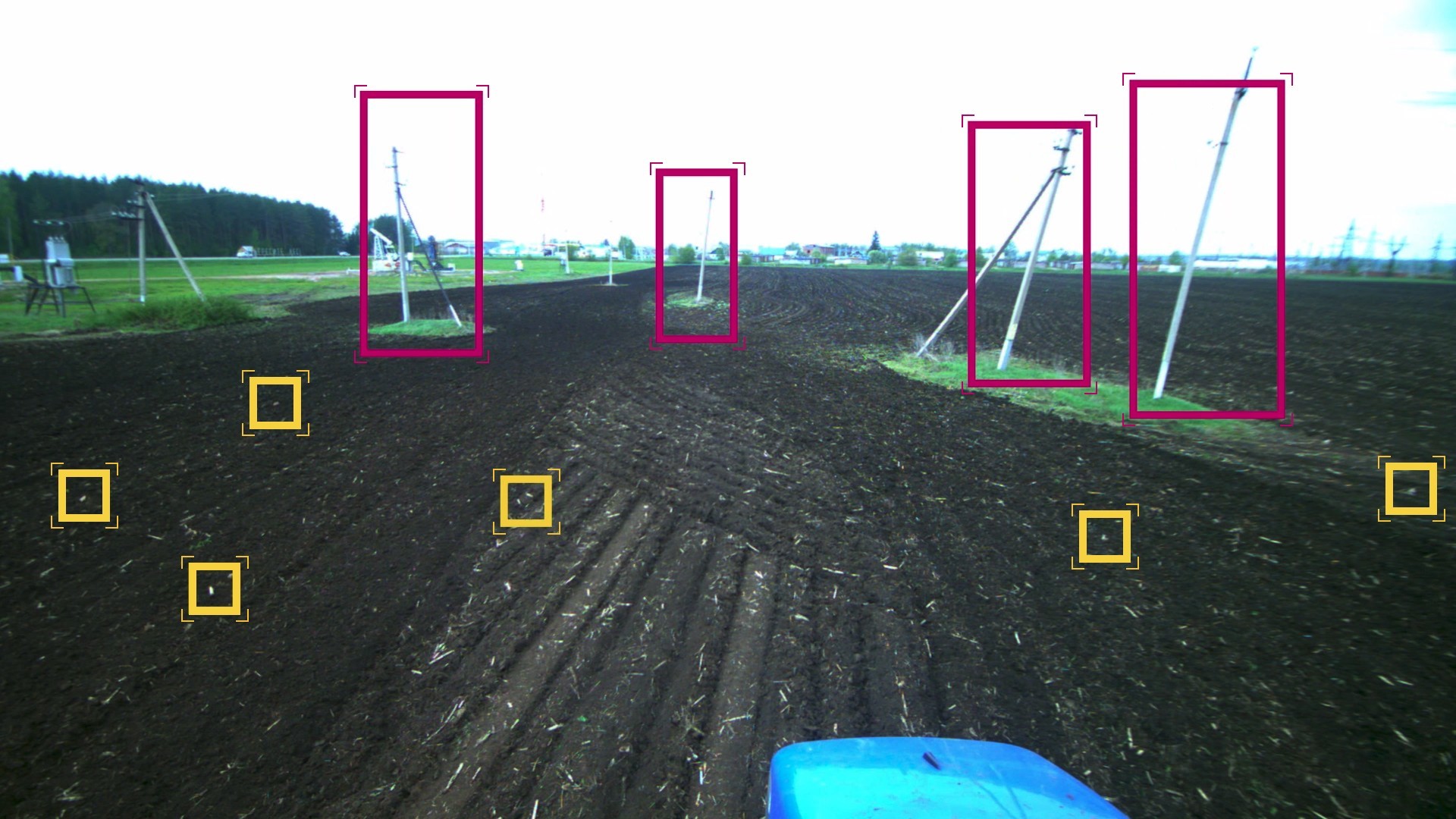
रूसी कंपनी कॉग्निटिव टेक्नोलॉजीज ने तातारस्तान में अपने स्वयं के डिजाइन की एक कंप्यूटर दृष्टि प्रणाली के साथ मानव रहित ट्रैक्टरों का पहला परीक्षण किया। हार्डवेयर और सॉफ्टवेयर कॉम्प्लेक्स को भविष्य में न केवल ट्रैक्टरों पर, बल्कि अन्य कृषि उपकरणों - कंबाइन, सीडर्स और इतने पर स्थापित करने की योजना है, इज़वेस्टिया लिखते हैं ।मानव रहित वाहनों और कंप्यूटर विज़न सिस्टम के लिए धन्यवाद, रूसी फ़ार्म अपनी लाभप्रदता को बढ़ाने में सक्षम होंगे, क्योंकि अब महंगे उपकरणों का अकुशल रूप से उपयोग किया जाता है। उदाहरण के लिए, हारवेस्टर दिन में औसतन छह घंटे काम करता है, और बाकी समय यह बेकार है। मानव रहित ट्रैक्टर और कंबाइन खेतों में दिन और रात, 24 घंटे काम करेंगे। उन्हें खराब दृश्यता की स्थिति, बारिश या कोहरे से नहीं रोका जाएगा, और यहां तक कि पिच के अंधेरे में, एक मानव रहित ट्रैक्टर दिन के दौरान प्रभावी ढंग से घास या आलू लेने में सक्षम है।रूस में मानव रहित कृषि उपकरण को एक नई कृषि होल्डिंग कंपनी द्वारा बढ़ावा दिया जाएगा, जो कि संज्ञानात्मक टेक्नोलॉजीज कृषि उपकरण निर्माता रोस्टेल्मैश और कृषि होल्डिंग सोयूज-एग्रो के साथ इन्नोपोलिस विशेष आर्थिक क्षेत्र के आधार पर बनाती है।पूर्ण अंधेरे में, मानवरहित प्रणालियों के लिए, आप नाइट विज़न कैमरों का उपयोग कर सकते हैं, लेकिन यह क्षेत्र के पूर्व-चिह्नित नक्शे के साथ लिडार का उपयोग करने के लिए अधिक प्रभावी है, जो कि ट्रैक्टर के नेविगेशन कंप्यूटर में सूचीबद्ध है। अमेरिकी सहयोगियों ने हाल ही में एक मानव रहित ऑटोमोबाइल वाहन प्रणाली का पूरी तरह से अंधेरे में परीक्षण किया - और यह निर्धारित किया कि नाविक के साथ एक लिडार अंधेरे में एक कार को नियंत्रित करता है जो एक मानव चालक की तुलना में अधिक सुरक्षित है।एरिज़ोना के एक प्रशिक्षण मैदान में मानव रहित फोर्ड के परीक्षण के दौरान, क्षेत्र का एक 3 डी मानचित्र बनाया गया था, और अंधेरे में लेजर दालों (2.8 मिलियन दालों प्रति सेकंड) का उपयोग करने वाले लिडार ने मार्ग को प्रशस्त किया, जैसे कि 3 डी मानचित्र के लिए अभिविन्यास के साथ सड़क की जांच करना। रूसी ट्रैक्टर को अभी तक लिडार से लैस करने की योजना नहीं है, क्योंकि इससे इसकी लागत में काफी वृद्धि होगी। फिलहाल, डेवलपर्स के अनुसार, मानव रहित दृष्टि के सॉफ्टवेयर-हार्डवेयर कॉम्प्लेक्स की लागत ट्रैक्टर की लागत का 15% से अधिक नहीं है। रूसी सामूहिक खेतों और खेतों के लिए यह एक स्वीकार्य मार्जिन है। यदि आप ट्रैक्टर पर एक पूर्ण ढक्कन लगाते हैं, तो उपकरण की लागत में काफी वृद्धि होगी।कंप्यूटर ट्रैक्टरों को रूसी ट्रैक्टरों पर स्थापित किया जाएगा, जिसमें एक स्टीरियो जोड़ी भी शामिल है - दो वीडियो कैमरों की एक प्रणाली जो पूर्ण एचडी रिज़ॉल्यूशन के साथ वीडियो शूट करती है, अर्थात 1920x1080 पिक्सल।वीडियो कैमरों के अलावा, रूसी मानव रहित ट्रैक्टर में नेविगेशन और जड़ता सेंसर ग्लोनास और जीपीएस और एक कंप्यूटिंग यूनिट (कंप्यूटर) शामिल हैं।"कंप्यूटर विज़न सिस्टम खतरनाक वस्तुओं के उच्च परिशुद्धता का पता लगाने की अनुमति देता है, उनके आकार और उच्च परिशुद्धता के नक्शे के लिए निर्देशांक," कॉग्निटिव टेक्नोलॉजीज के अध्यक्ष ओल्गा उस्कोवा कहते हैं । "क्षेत्र पर वस्तुओं की स्थिति के सटीक ज्ञान के लिए धन्यवाद, फसल से पहले ही उनमें से कई को निकालना संभव हो जाता है, जब वे कृषि मशीनरी के यांत्रिक तत्वों के लिए एक वास्तविक खतरा पैदा कर सकते हैं।"क्षेत्र का एक डिजिटल नक्शा तैयार किया गया है और आस-पास की वस्तुओं (डंडे, पत्थर और अन्य कलाकृतियाँ) को प्रिजर्विंग ऑपरेशन के दौरान इस तरह से लागू किया गया है, जैसे कि निषेचन और हैरोइंग। ऑपरेशन वसंत में होता है, जब बोया गया क्षेत्र बोया नहीं जाता है, ताकि सभी कलाकृतियों को कंप्यूटर विज़न सिस्टम द्वारा अच्छी तरह से पता लगाया जा सके। इन डिजिटल मानचित्रों के अनुसार, फसल के दौरान ट्रैक्टर को गर्मियों और शरद ऋतु में निर्देशित किया जाएगा। वह उन वस्तुओं के चारों ओर जाने की कोशिश करेगा जिन्हें वसंत में मैदान से हटाया नहीं जा सकता था।डेवलपर्स को भरोसा है कि वाहन के सेंसर और कंप्यूटर विज़न सिस्टम उन बाधाओं का भी पता लगाने में सक्षम होंगे जो मानचित्र पर नहीं हैं। यह कहा जाता है कि प्रणाली 15-20 मीटर की दूरी पर 10-15 सेमी से आकार की वस्तुओं को पहचानती है। बाकी सब कुछ खतरनाक नहीं है अगर ट्रैक्टर पर एक पत्थर का जाल स्थापित किया गया हो।
रूसी ट्रैक्टर को अभी तक लिडार से लैस करने की योजना नहीं है, क्योंकि इससे इसकी लागत में काफी वृद्धि होगी। फिलहाल, डेवलपर्स के अनुसार, मानव रहित दृष्टि के सॉफ्टवेयर-हार्डवेयर कॉम्प्लेक्स की लागत ट्रैक्टर की लागत का 15% से अधिक नहीं है। रूसी सामूहिक खेतों और खेतों के लिए यह एक स्वीकार्य मार्जिन है। यदि आप ट्रैक्टर पर एक पूर्ण ढक्कन लगाते हैं, तो उपकरण की लागत में काफी वृद्धि होगी।कंप्यूटर ट्रैक्टरों को रूसी ट्रैक्टरों पर स्थापित किया जाएगा, जिसमें एक स्टीरियो जोड़ी भी शामिल है - दो वीडियो कैमरों की एक प्रणाली जो पूर्ण एचडी रिज़ॉल्यूशन के साथ वीडियो शूट करती है, अर्थात 1920x1080 पिक्सल।वीडियो कैमरों के अलावा, रूसी मानव रहित ट्रैक्टर में नेविगेशन और जड़ता सेंसर ग्लोनास और जीपीएस और एक कंप्यूटिंग यूनिट (कंप्यूटर) शामिल हैं।"कंप्यूटर विज़न सिस्टम खतरनाक वस्तुओं के उच्च परिशुद्धता का पता लगाने की अनुमति देता है, उनके आकार और उच्च परिशुद्धता के नक्शे के लिए निर्देशांक," कॉग्निटिव टेक्नोलॉजीज के अध्यक्ष ओल्गा उस्कोवा कहते हैं । "क्षेत्र पर वस्तुओं की स्थिति के सटीक ज्ञान के लिए धन्यवाद, फसल से पहले ही उनमें से कई को निकालना संभव हो जाता है, जब वे कृषि मशीनरी के यांत्रिक तत्वों के लिए एक वास्तविक खतरा पैदा कर सकते हैं।"क्षेत्र का एक डिजिटल नक्शा तैयार किया गया है और आस-पास की वस्तुओं (डंडे, पत्थर और अन्य कलाकृतियाँ) को प्रिजर्विंग ऑपरेशन के दौरान इस तरह से लागू किया गया है, जैसे कि निषेचन और हैरोइंग। ऑपरेशन वसंत में होता है, जब बोया गया क्षेत्र बोया नहीं जाता है, ताकि सभी कलाकृतियों को कंप्यूटर विज़न सिस्टम द्वारा अच्छी तरह से पता लगाया जा सके। इन डिजिटल मानचित्रों के अनुसार, फसल के दौरान ट्रैक्टर को गर्मियों और शरद ऋतु में निर्देशित किया जाएगा। वह उन वस्तुओं के चारों ओर जाने की कोशिश करेगा जिन्हें वसंत में मैदान से हटाया नहीं जा सकता था।डेवलपर्स को भरोसा है कि वाहन के सेंसर और कंप्यूटर विज़न सिस्टम उन बाधाओं का भी पता लगाने में सक्षम होंगे जो मानचित्र पर नहीं हैं। यह कहा जाता है कि प्रणाली 15-20 मीटर की दूरी पर 10-15 सेमी से आकार की वस्तुओं को पहचानती है। बाकी सब कुछ खतरनाक नहीं है अगर ट्रैक्टर पर एक पत्थर का जाल स्थापित किया गया हो। एक संज्ञानात्मक टेक्नोलॉजीज कंप्यूटर विज़नट्रैक्टर का परीक्षण करना एक मानव रहित ट्रैक्टर का परीक्षण लगभग डेढ़ साल तक जारी रहेगा। ओल्गा उस्कोवा के अनुसार, यह समय कंप्यूटर दृष्टि प्रणाली को औद्योगिक उपयोग के चरण में लाने और इसे वाणिज्यिक संचालन में लगाने के लिए पर्याप्त है। हार्डवेयर और सॉफ्टवेयर सिस्टम रूस में खेतों के साथ-साथ विदेशों और निकट के देशों में बेचे जाएंगे।इस क्षेत्र में प्रायोगिक विकास केवल रूस में नहीं हैं। उदाहरण के लिए, जापान के कृषि मंत्री ने हाल ही में किसानों सहित एक बढ़ती आबादी के कारण कृषि में रोबोट तकनीक पर स्विच करने का विषय उठाया ।जापानी किसानों की औसत आयु 67 वर्ष की है, 65 वर्ष से अधिक उम्र के दो-तिहाई। रूस में, जीवन प्रत्याशा कम होने के कारण अभी भी कोई उम्र बढ़ने की समस्या नहीं है, लेकिन यह समय के साथ प्रकट हो सकता है।जापानी निगम कुबोता के उत्पादन के लिए मानव रहित ट्रैक्टर तैयार हैं।
एक संज्ञानात्मक टेक्नोलॉजीज कंप्यूटर विज़नट्रैक्टर का परीक्षण करना एक मानव रहित ट्रैक्टर का परीक्षण लगभग डेढ़ साल तक जारी रहेगा। ओल्गा उस्कोवा के अनुसार, यह समय कंप्यूटर दृष्टि प्रणाली को औद्योगिक उपयोग के चरण में लाने और इसे वाणिज्यिक संचालन में लगाने के लिए पर्याप्त है। हार्डवेयर और सॉफ्टवेयर सिस्टम रूस में खेतों के साथ-साथ विदेशों और निकट के देशों में बेचे जाएंगे।इस क्षेत्र में प्रायोगिक विकास केवल रूस में नहीं हैं। उदाहरण के लिए, जापान के कृषि मंत्री ने हाल ही में किसानों सहित एक बढ़ती आबादी के कारण कृषि में रोबोट तकनीक पर स्विच करने का विषय उठाया ।जापानी किसानों की औसत आयु 67 वर्ष की है, 65 वर्ष से अधिक उम्र के दो-तिहाई। रूस में, जीवन प्रत्याशा कम होने के कारण अभी भी कोई उम्र बढ़ने की समस्या नहीं है, लेकिन यह समय के साथ प्रकट हो सकता है।जापानी निगम कुबोता के उत्पादन के लिए मानव रहित ट्रैक्टर तैयार हैं। लिडार के साथ एक स्वायत्त कुबोटा ट्रैक्टर का प्रोटोटाइप । बेलारूस मेंछोटे मानव रहित ट्रैक्टर भी बनाए गए हैं।। निश्चित रूप से मिन्स्क ट्रैक्टर प्लांट द्वारा निर्मित लोकप्रिय बेलारूसी ट्रैक्टरों पर रूसी कंप्यूटर विज़न सिस्टम भी स्थापित किया जा सकता है।रूसी डेवलपर्स की कल्पना में, भविष्य में, रूस में कृषि इस प्रकार है: “सभी स्मार्ट कृषि उपकरणों के काम को नियंत्रण केंद्र से कम से कम लोगों द्वारा नियंत्रित किया जाएगा, जहां से सभी मशीनों की निगरानी की जाएगी। यदि आवश्यक हो, तो वह ट्रैक्टरों के कार्यक्रम और संचालन समय को निर्धारित करने में सक्षम हो जाएगा, और उसे कंसोल पर लगातार नहीं रहना होगा, ”ओल्गा उस्वा कहते हैं।सामान्य तौर पर, लेखक के रूप में लगभग निकोलाई नोसोव ने साइंस फिक्शन काम में सौर शहर में डनो की भविष्यवाणी की।
लिडार के साथ एक स्वायत्त कुबोटा ट्रैक्टर का प्रोटोटाइप । बेलारूस मेंछोटे मानव रहित ट्रैक्टर भी बनाए गए हैं।। निश्चित रूप से मिन्स्क ट्रैक्टर प्लांट द्वारा निर्मित लोकप्रिय बेलारूसी ट्रैक्टरों पर रूसी कंप्यूटर विज़न सिस्टम भी स्थापित किया जा सकता है।रूसी डेवलपर्स की कल्पना में, भविष्य में, रूस में कृषि इस प्रकार है: “सभी स्मार्ट कृषि उपकरणों के काम को नियंत्रण केंद्र से कम से कम लोगों द्वारा नियंत्रित किया जाएगा, जहां से सभी मशीनों की निगरानी की जाएगी। यदि आवश्यक हो, तो वह ट्रैक्टरों के कार्यक्रम और संचालन समय को निर्धारित करने में सक्षम हो जाएगा, और उसे कंसोल पर लगातार नहीं रहना होगा, ”ओल्गा उस्वा कहते हैं।सामान्य तौर पर, लेखक के रूप में लगभग निकोलाई नोसोव ने साइंस फिक्शन काम में सौर शहर में डनो की भविष्यवाणी की। स्वतंत्र विशेषज्ञों का मानना है कि कृषि में पूरी तरह से स्वचालित भविष्य अभी तक काम नहीं करेगा। वाहन के पहिये के पीछे एक व्यक्ति होना चाहिए जो स्वचालन के संचालन को नियंत्रित करता है और आपातकाल के मामले में नियंत्रण लेने के लिए तैयार है।वैसे, कॉग्निटिव टेक्नोलॉजीज ने हबराब्रिज पर कॉर्पोरेट ब्लॉग में मशीन विजन में इसके विकास के बारे में अधिक विस्तार से बात की। 2014 में, मास्को इंस्टीट्यूट ऑफ फिजिक्स एंड टेक्नोलॉजी में संज्ञानात्मक प्रौद्योगिकी विभाग में एक संयुक्त परियोजना के हिस्से के रूप में, एक रोबोट कार विकसित की गई थी कि "वास्तविक समय वीडियो स्ट्रीम को संसाधित करता है, आसपास के दृश्य को पहचानता है, वस्तुओं का पता लगाता है और कार्य को हल करने के उद्देश्य से एक नियंत्रण बनाता है।" रोबोट को लाल गेंद का पीछा करने और बम्पर के साथ धक्का देने का काम सौंपा गया था।वीडियो को मॉस्को इंस्टीट्यूट ऑफ फिजिक्स एंड टेक्नोलॉजी में युवा वैज्ञानिकों के शरद सम्मेलन में एक रिपोर्ट के दौरान मुख्य भवन के गलियारे में शूट किया गया था।
स्वतंत्र विशेषज्ञों का मानना है कि कृषि में पूरी तरह से स्वचालित भविष्य अभी तक काम नहीं करेगा। वाहन के पहिये के पीछे एक व्यक्ति होना चाहिए जो स्वचालन के संचालन को नियंत्रित करता है और आपातकाल के मामले में नियंत्रण लेने के लिए तैयार है।वैसे, कॉग्निटिव टेक्नोलॉजीज ने हबराब्रिज पर कॉर्पोरेट ब्लॉग में मशीन विजन में इसके विकास के बारे में अधिक विस्तार से बात की। 2014 में, मास्को इंस्टीट्यूट ऑफ फिजिक्स एंड टेक्नोलॉजी में संज्ञानात्मक प्रौद्योगिकी विभाग में एक संयुक्त परियोजना के हिस्से के रूप में, एक रोबोट कार विकसित की गई थी कि "वास्तविक समय वीडियो स्ट्रीम को संसाधित करता है, आसपास के दृश्य को पहचानता है, वस्तुओं का पता लगाता है और कार्य को हल करने के उद्देश्य से एक नियंत्रण बनाता है।" रोबोट को लाल गेंद का पीछा करने और बम्पर के साथ धक्का देने का काम सौंपा गया था।वीडियो को मॉस्को इंस्टीट्यूट ऑफ फिजिक्स एंड टेक्नोलॉजी में युवा वैज्ञानिकों के शरद सम्मेलन में एक रिपोर्ट के दौरान मुख्य भवन के गलियारे में शूट किया गया था।Source: https://habr.com/ru/post/hi395169/
All Articles