ICLEBO ओमेगा रोबोट वैक्यूम क्लीनर का परीक्षण और समीक्षा
दक्षिण कोरियाई कंपनी युजिन रोबोट के नए iCLEBO ओमेगा रोबोट वैक्यूम क्लीनर में कई दिलचस्प विशेषताएं हैं और यह रूसी बाजार पर सबसे शक्तिशाली वैक्यूम क्लीनर में से एक है। यद्यपि निर्माता आमतौर पर रोबोट वैक्यूम क्लीनर के लिए सक्शन पावर के मापदंडों की घोषणा नहीं करते हैं, यह ध्यान देने योग्य है कि ओमेगा मॉडल में सबसे कुशल और शक्तिशाली रोबोट वैक्यूम क्लीनर का नाम होने की हर संभावना है। यह व्यापक ब्लेड के साथ एक नया ब्रशलेस टर्बो इंजन का उपयोग करता है, जो अपेक्षाकृत कम शोर स्तर (टर्बो मोड में 70 डीबी तक) में सफाई की गुणवत्ता को बढ़ाने की अनुमति देता है। ब्रशलेस मोटर बहुत विश्वसनीय है और 10 से अधिक वर्षों की वारंटी है।
ताकत
एक नया मॉडल विकसित करते समय, निर्माता ने अवशोषण की ताकत पर मुख्य जोर दिया और पालतू बाल और लंबे बालों के मुख्य ब्रश को साफ करने की समस्या को कम किया। अपने प्रतिद्वंद्वियों पर ओमेगा मॉडल का पहला और बहुत महत्वपूर्ण लाभ वास्तव में उच्च सक्शन पावर है। इस कार्य को पूरा करने के लिए, युजिन रोबोट इंजीनियरों ने उच्च दक्षता सूचकांक के साथ एक नया ब्रशलेस टर्बो इंजन का इस्तेमाल किया और पिछले एर्ट मॉडल (अब इसकी क्षमता 4400 एमएएच) की तुलना में ली-आयन बैटरी की क्षमता को दोगुना कर दिया है। रोबोट कुशलतापूर्वक यहां तक कि ठीक धूल, जैसे रेत, कालीन से (अपेक्षाकृत छोटे ढेर के साथ) एकत्र करने में सक्षम है। निर्माता के परीक्षण के परिणामों के अनुसार, ओमेगा दक्षता में प्रत्यक्ष प्रतियोगियों से 20% तक आगे है।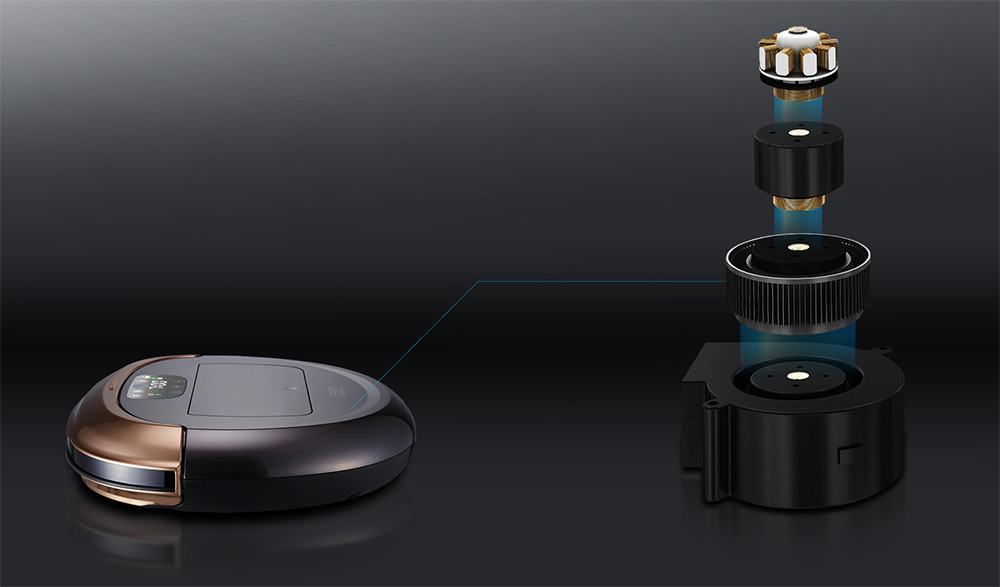 यह रोबोट एक वाइडस्क्रीन कैमरा का उपयोग करके एक कमरे की मैपिंग प्रणाली का भी उपयोग करता है, जो मामले के शीर्ष पर स्थित है। वैक्यूम क्लीनर उन जगहों को याद करता है जहां यह पहले से ही साफ किया गया था। वह चार्जिंग के लिए आधार का स्थान याद रखता है और सबसे छोटे रास्ते पर वापस जाता है। इससे कोई फर्क नहीं पड़ता कि आपके पास एक 3 या 5 बेडरूम का अपार्टमेंट है, वैक्यूम क्लीनर अपने आप ही सभी उपलब्ध कमरों के माध्यम से ड्राइव करेगा। यदि कमरे का क्षेत्र काफी बड़ा है और रोबोट एक चार्जिंग चक्र में सफाई नहीं कर सकता है, तो यह आधार पर वापस आ जाएगा, रिचार्ज करेगा और उसी स्थान से सफाई जारी रखेगा। ओमेगा दो ऐसे क्रमिक चक्रों को लागू करता है। यदि आपको अधिक गहन सफाई की आवश्यकता है या क्षेत्र छोटा है, तो आप MAX मोड का उपयोग कर सकते हैं, जिसमें ओमेगा पहले पूरे उपलब्ध क्षेत्र को समानांतर लाइनों में पास करेगा,90 डिग्री को चालू करेगा और एक ही स्थान पर सफाई जारी रखेगा लेकिन मूल पथ पर लंबवत दिशा में। यह नया डुअल स्नेक मोड है जो आर्टे के पास नहीं था।नए वी 6 ब्लेड रबर टर्बो ब्रश और उच्च सक्शन पावर के उपयोग के लिए धन्यवाद, वैक्यूम क्लीनर बहुत कुशलतापूर्वक बाल और पालतू बाल इकट्ठा करता है। मुख्य टर्बो ब्रश पर व्यावहारिक रूप से कोई बाल, ऊन, धागा नहीं है। सब कुछ धूल कलेक्टर में गिर जाएगा, जिसे साफ करना बहुत आसान है। वैक्यूम क्लीनर का तल भी हमेशा साफ रहता है, इसे पोंछने की कोई आवश्यकता नहीं है। बस इतना करना है कि डस्ट कंटेनर को खाली करना है और रोबोट फिर से उपयोग के लिए तैयार है। इसके लिए न्यूनतम देखभाल आवश्यक है। हम व्यवहार में इस सभी का परीक्षण और सत्यापन करेंगे, परीक्षा परिणाम और वीडियो बाद में लेख में प्रस्तुत किए जाएंगे।
यह रोबोट एक वाइडस्क्रीन कैमरा का उपयोग करके एक कमरे की मैपिंग प्रणाली का भी उपयोग करता है, जो मामले के शीर्ष पर स्थित है। वैक्यूम क्लीनर उन जगहों को याद करता है जहां यह पहले से ही साफ किया गया था। वह चार्जिंग के लिए आधार का स्थान याद रखता है और सबसे छोटे रास्ते पर वापस जाता है। इससे कोई फर्क नहीं पड़ता कि आपके पास एक 3 या 5 बेडरूम का अपार्टमेंट है, वैक्यूम क्लीनर अपने आप ही सभी उपलब्ध कमरों के माध्यम से ड्राइव करेगा। यदि कमरे का क्षेत्र काफी बड़ा है और रोबोट एक चार्जिंग चक्र में सफाई नहीं कर सकता है, तो यह आधार पर वापस आ जाएगा, रिचार्ज करेगा और उसी स्थान से सफाई जारी रखेगा। ओमेगा दो ऐसे क्रमिक चक्रों को लागू करता है। यदि आपको अधिक गहन सफाई की आवश्यकता है या क्षेत्र छोटा है, तो आप MAX मोड का उपयोग कर सकते हैं, जिसमें ओमेगा पहले पूरे उपलब्ध क्षेत्र को समानांतर लाइनों में पास करेगा,90 डिग्री को चालू करेगा और एक ही स्थान पर सफाई जारी रखेगा लेकिन मूल पथ पर लंबवत दिशा में। यह नया डुअल स्नेक मोड है जो आर्टे के पास नहीं था।नए वी 6 ब्लेड रबर टर्बो ब्रश और उच्च सक्शन पावर के उपयोग के लिए धन्यवाद, वैक्यूम क्लीनर बहुत कुशलतापूर्वक बाल और पालतू बाल इकट्ठा करता है। मुख्य टर्बो ब्रश पर व्यावहारिक रूप से कोई बाल, ऊन, धागा नहीं है। सब कुछ धूल कलेक्टर में गिर जाएगा, जिसे साफ करना बहुत आसान है। वैक्यूम क्लीनर का तल भी हमेशा साफ रहता है, इसे पोंछने की कोई आवश्यकता नहीं है। बस इतना करना है कि डस्ट कंटेनर को खाली करना है और रोबोट फिर से उपयोग के लिए तैयार है। इसके लिए न्यूनतम देखभाल आवश्यक है। हम व्यवहार में इस सभी का परीक्षण और सत्यापन करेंगे, परीक्षा परिणाम और वीडियो बाद में लेख में प्रस्तुत किए जाएंगे।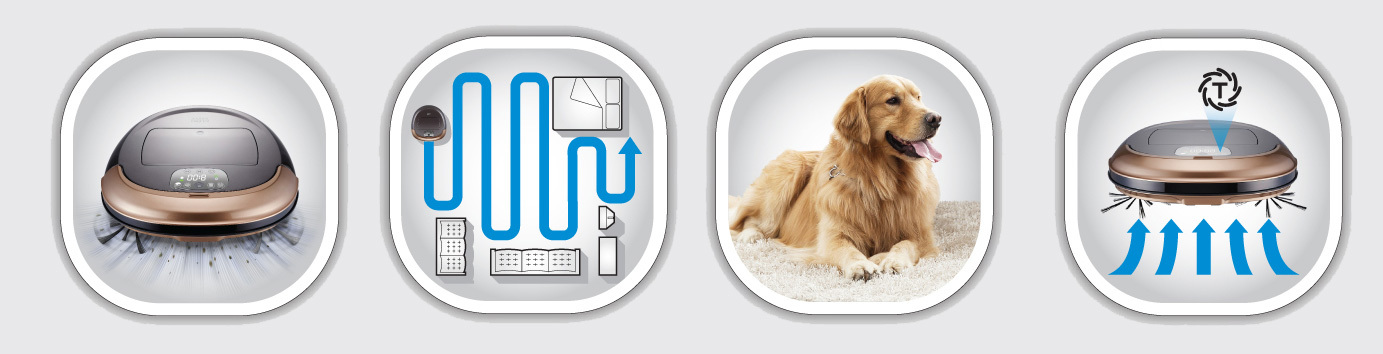 इंजीनियरों ने कई नए सेंसर स्थापित किए, जैसे कि एक गंदगी सेंसर और एक सतह प्रकार मान्यता सेंसर। यदि रास्ते में बहुत अधिक मलबा है, तो ओमेगा टर्बो-सक्शन मोड पर मुड़ता है जिसमें चूषण शक्ति और सफाई दक्षता बढ़ जाती है। कालीनों पर, रोबोट भी स्वचालित रूप से टर्बो मोड को चालू करता है। फ़िल्टर उपस्थिति सेंसर वैक्यूम क्लीनर को धूल कलेक्टर में अपनी उपस्थिति के बिना शुरू करने की अनुमति नहीं देगा।
इंजीनियरों ने कई नए सेंसर स्थापित किए, जैसे कि एक गंदगी सेंसर और एक सतह प्रकार मान्यता सेंसर। यदि रास्ते में बहुत अधिक मलबा है, तो ओमेगा टर्बो-सक्शन मोड पर मुड़ता है जिसमें चूषण शक्ति और सफाई दक्षता बढ़ जाती है। कालीनों पर, रोबोट भी स्वचालित रूप से टर्बो मोड को चालू करता है। फ़िल्टर उपस्थिति सेंसर वैक्यूम क्लीनर को धूल कलेक्टर में अपनी उपस्थिति के बिना शुरू करने की अनुमति नहीं देगा।डिजाइन और उपकरण
नए रोबोट वैक्यूम क्लीनर को दो बॉडी रंगों में पेश किया गया है: iCLEBO ओमेगा गोल्ड (YCR-M07-10) और iCLEBO ओमेगा व्हाइट (YCR-M07-20)। शरीर प्लास्टिक चमकदार है, लेकिन प्लास्टिक सामग्री बहुत उच्च गुणवत्ता वाली है और इसकी कोटिंग सतह पर उंगलियों के निशान नहीं छोड़ती है। व्हाइट केस का एक प्रकार कारों पर सफेद / मोती धातु की तरह दिखता है, अर्थात, इसकी एक निश्चित रंग गहराई है। सूरत डिजाइन ब्यूरो इंसोडिग्नस में डिजाइन की गई थी। वैक्यूम क्लीनर का आकार अब गोल नहीं है, विशेष नए साइड ब्रश और एक उपयुक्त आकार कमरे के कोनों को बेहतर ढंग से साफ करना संभव बनाता है। ओमेगा 96% तक की दक्षता के साथ कोनों को साफ करने में सक्षम है। वैक्यूम क्लीनर में केवल 87 मिमी की ऊंचाई के साथ एक अल्ट्रा-पतली प्रोफ़ाइल है, अर्थात, यह आसानी से बिस्तर, कुर्सियाँ, अलमारियाँ के नीचे जाएगी और महीनों तक वहां धूल इकट्ठा करेगी। एक रोबोट वैक्यूम क्लीनर के साथ पूरा शामिल है: बाहरी बिजली की आपूर्ति के साथ चार्जिंग बेस, स्पेयर HEPA फिल्टर (केवल डिलीवरी के रूसी संस्करण में), चुंबकीय टेप सीमक (लंबाई 1 मीटर है, आपको सफाई क्षेत्र को सीमित करने की अनुमति देता है), रिमोट कंट्रोल (समय सेट करने के लिए, टाइमर) देरी से शुरू, रोबोट नियंत्रण, आधार पर लौटना, मोड का विकल्प: मजबूर टर्बो मोड, थ्रेशोल्ड थ्रेशोल्ड मोड), रिमोट कंट्रोल के लिए बैटरी, वैक्यूम क्लीनर की सफाई के लिए एक ब्रश और निश्चित रूप से, रूसी में निर्देश और एक वारंटी कार्ड।एक धूल कलेक्टर डिब्बे मामले के शीर्ष कवर पर स्थित है। डस्ट कलेक्टर में एक pleated HEPA फिल्टर है। इसे आसानी से मलबे से साफ किया जाता है, फिल्टर एक कुंडी पर लगाया जाता है। डस्ट कलेक्टर को पानी से धोया जा सकता है, लेकिन उपयोग करने से पहले इसे अच्छी तरह से सूखा जाना चाहिए ताकि नमी मदरबोर्ड पर वैक्यूम क्लीनर के अंदर न जाए। रबर कलेक्टर को धूल कलेक्टर और शरीर के बीच स्थापित किया जाता है, सब कुछ काफी तंग है। अपार्टमेंट में 2 सप्ताह के परीक्षण के बाद, धूल डिब्बे में कोई धूल नहीं मिली, सब कुछ इसके अंदर था।
एक रोबोट वैक्यूम क्लीनर के साथ पूरा शामिल है: बाहरी बिजली की आपूर्ति के साथ चार्जिंग बेस, स्पेयर HEPA फिल्टर (केवल डिलीवरी के रूसी संस्करण में), चुंबकीय टेप सीमक (लंबाई 1 मीटर है, आपको सफाई क्षेत्र को सीमित करने की अनुमति देता है), रिमोट कंट्रोल (समय सेट करने के लिए, टाइमर) देरी से शुरू, रोबोट नियंत्रण, आधार पर लौटना, मोड का विकल्प: मजबूर टर्बो मोड, थ्रेशोल्ड थ्रेशोल्ड मोड), रिमोट कंट्रोल के लिए बैटरी, वैक्यूम क्लीनर की सफाई के लिए एक ब्रश और निश्चित रूप से, रूसी में निर्देश और एक वारंटी कार्ड।एक धूल कलेक्टर डिब्बे मामले के शीर्ष कवर पर स्थित है। डस्ट कलेक्टर में एक pleated HEPA फिल्टर है। इसे आसानी से मलबे से साफ किया जाता है, फिल्टर एक कुंडी पर लगाया जाता है। डस्ट कलेक्टर को पानी से धोया जा सकता है, लेकिन उपयोग करने से पहले इसे अच्छी तरह से सूखा जाना चाहिए ताकि नमी मदरबोर्ड पर वैक्यूम क्लीनर के अंदर न जाए। रबर कलेक्टर को धूल कलेक्टर और शरीर के बीच स्थापित किया जाता है, सब कुछ काफी तंग है। अपार्टमेंट में 2 सप्ताह के परीक्षण के बाद, धूल डिब्बे में कोई धूल नहीं मिली, सब कुछ इसके अंदर था।
 थोड़ी अधिक एलसीडी टच स्क्रीन है। इसके साथ, आप वैक्यूम क्लीनर को चालू कर सकते हैं, इसे ऑपरेशन में डाल सकते हैं, सफाई मोड का चयन कर सकते हैं। केवल 3 मोड हैं: ऑटो, अधिकतम और स्थानीय सफाई। ऑटो मोड में, वैक्यूम क्लीनर अपार्टमेंट के सभी सुलभ स्थानों में सफाई करता है, सबसे इष्टतम मार्ग चुनकर, शुरुआती बिंदु के स्थान को याद करता है। Arte मॉडल की तरह, vSLAM कमरे के नक्शे के दृश्य निर्माण की तकनीक का उपयोग किया जाता है। आधार पर लौटने के बाद, रोबोट कार्ड को त्याग देता है और अगली बार फिर से बनाता है। ओमेगा मॉडल में एक और तकनीक है जो अपार्टमेंट में नेविगेशन में सुधार करती है - एनएसटी (नॉन स्लिप ट्रैवलिंग)। एल्गोरिथ्म आपको पहले बनाए गए कमरे के नक्शे के तुलनात्मक विश्लेषण द्वारा मार्ग रेखा को पुनर्स्थापित करने की अनुमति देता है। अधिकतम मोड में, वैक्यूम क्लीनर समानांतर लाइनों में साफ होता है, फिर लंबवत, और इसी तरह जब तक बैटरी खत्म नहीं हो जाती।इस मोड में, वह कमरे का एक नक्शा भी बनाता है। स्थानीय सफाई मोड में, वैक्यूम क्लीनर सर्पिल में घूमते हुए 1 मीटर के व्यास के साथ एक सर्कल में साफ करता है। प्रदर्शन टर्बो सक्शन मोड को सक्षम / अक्षम करने, थ्रेशोल्ड पर काबू पाने मोड पर जानकारी दिखाता है। यदि थ्रेशोल्ड ओवरराइड मोड को अक्षम कर दिया जाता है, तो रोबोट 5 मिमी की ऊंचाई को पार करने में सक्षम नहीं होगा। इसके अलावा, इस मोड का उपयोग अंधेरे फर्श पर किया जाना चाहिए। ऊपर एक वाइडस्क्रीन कैमरा है जिसमें 130 डिग्री का व्यूइंग एंगल है।ऊपर एक वाइडस्क्रीन कैमरा है, जिसमें 130 डिग्री का व्यूइंग एंगल है।ऊपर एक वाइडस्क्रीन कैमरा है जिसमें 130 डिग्री का व्यूइंग एंगल है।
थोड़ी अधिक एलसीडी टच स्क्रीन है। इसके साथ, आप वैक्यूम क्लीनर को चालू कर सकते हैं, इसे ऑपरेशन में डाल सकते हैं, सफाई मोड का चयन कर सकते हैं। केवल 3 मोड हैं: ऑटो, अधिकतम और स्थानीय सफाई। ऑटो मोड में, वैक्यूम क्लीनर अपार्टमेंट के सभी सुलभ स्थानों में सफाई करता है, सबसे इष्टतम मार्ग चुनकर, शुरुआती बिंदु के स्थान को याद करता है। Arte मॉडल की तरह, vSLAM कमरे के नक्शे के दृश्य निर्माण की तकनीक का उपयोग किया जाता है। आधार पर लौटने के बाद, रोबोट कार्ड को त्याग देता है और अगली बार फिर से बनाता है। ओमेगा मॉडल में एक और तकनीक है जो अपार्टमेंट में नेविगेशन में सुधार करती है - एनएसटी (नॉन स्लिप ट्रैवलिंग)। एल्गोरिथ्म आपको पहले बनाए गए कमरे के नक्शे के तुलनात्मक विश्लेषण द्वारा मार्ग रेखा को पुनर्स्थापित करने की अनुमति देता है। अधिकतम मोड में, वैक्यूम क्लीनर समानांतर लाइनों में साफ होता है, फिर लंबवत, और इसी तरह जब तक बैटरी खत्म नहीं हो जाती।इस मोड में, वह कमरे का एक नक्शा भी बनाता है। स्थानीय सफाई मोड में, वैक्यूम क्लीनर सर्पिल में घूमते हुए 1 मीटर के व्यास के साथ एक सर्कल में साफ करता है। प्रदर्शन टर्बो सक्शन मोड को सक्षम / अक्षम करने, थ्रेशोल्ड पर काबू पाने मोड पर जानकारी दिखाता है। यदि थ्रेशोल्ड ओवरराइड मोड को अक्षम कर दिया जाता है, तो रोबोट 5 मिमी की ऊंचाई को पार करने में सक्षम नहीं होगा। इसके अलावा, इस मोड का उपयोग अंधेरे फर्श पर किया जाना चाहिए। ऊपर एक वाइडस्क्रीन कैमरा है जिसमें 130 डिग्री का व्यूइंग एंगल है।ऊपर एक वाइडस्क्रीन कैमरा है, जिसमें 130 डिग्री का व्यूइंग एंगल है।ऊपर एक वाइडस्क्रीन कैमरा है जिसमें 130 डिग्री का व्यूइंग एंगल है। रोबोट के सामने वाले बम्पर में बाधाओं की दूरी तय करने के लिए सेंसर हैं: ऑप्टिकल PSD-सेंसर और इंफ्रारेड। रोबोट दोनों तरह के सेंसर से रीडिंग लेता है। बम्पर पर एक मैकेनिकल टच सेंसर भी लगाया गया है, लेकिन अब यह सिंगल (आर्ट मॉडल के विपरीत) है और केवल केंद्र में स्थित है। रोबोट बाधाओं की उपस्थिति का अच्छी तरह से पता लगाता है और शायद ही कभी शारीरिक रूप से उनसे संपर्क करता है। अतिरिक्त फर्नीचर सुरक्षा के लिए, बम्पर में एक रबड़ की पट्टी होती है जो कोई अवशेष नहीं छोड़ती है और सदमे को नरम करती है। मामले के निचले हिस्से का समोच्च वैक्यूम क्लीनर को 15 मिमी तक की सीमा तक पार करने की अनुमति देता है। आवास की पिछली सतह पर हवा बहने के लिए खुले हैं।
रोबोट के सामने वाले बम्पर में बाधाओं की दूरी तय करने के लिए सेंसर हैं: ऑप्टिकल PSD-सेंसर और इंफ्रारेड। रोबोट दोनों तरह के सेंसर से रीडिंग लेता है। बम्पर पर एक मैकेनिकल टच सेंसर भी लगाया गया है, लेकिन अब यह सिंगल (आर्ट मॉडल के विपरीत) है और केवल केंद्र में स्थित है। रोबोट बाधाओं की उपस्थिति का अच्छी तरह से पता लगाता है और शायद ही कभी शारीरिक रूप से उनसे संपर्क करता है। अतिरिक्त फर्नीचर सुरक्षा के लिए, बम्पर में एक रबड़ की पट्टी होती है जो कोई अवशेष नहीं छोड़ती है और सदमे को नरम करती है। मामले के निचले हिस्से का समोच्च वैक्यूम क्लीनर को 15 मिमी तक की सीमा तक पार करने की अनुमति देता है। आवास की पिछली सतह पर हवा बहने के लिए खुले हैं।
 आइए हम ओमेगा के निचले हिस्से के डिजाइन पर अपना ध्यान दें। पहली चीज जो आपकी आंख को पकड़ती है वह ड्राइव पहियों है, जो एक कोण पर स्थित है। युजिन रोबोट ने रोबोट के संशोधित आकार (अब यह आरट मॉडल की तरह गोल नहीं है) के संबंध में इस तरह के रचनात्मक समाधान को लागू करने का फैसला किया, और पहियों को केंद्र से आगे स्थानांतरित कर दिया गया है। यह पहियों की इस व्यवस्था के साथ है कि वैक्यूम क्लीनर सही ढंग से नीले रंग से बाहर निकल सकता है। हमने निर्माता से पूछा कि क्या यह पहिया चलने के त्वरित पहनने को प्रभावित करेगा। हमें बताया गया कि इस फॉर्म फैक्टर में ओमेगा मॉडल को एक साल से अधिक समय तक परीक्षण किया गया है, इस व्यवस्था के साथ पहियों को आपूर्ति की जाने वाली धारा बहुत कम बदलती है और लंबे समय तक किसी भी पहनने और आंसू पर ध्यान नहीं दिया जाएगा।
आइए हम ओमेगा के निचले हिस्से के डिजाइन पर अपना ध्यान दें। पहली चीज जो आपकी आंख को पकड़ती है वह ड्राइव पहियों है, जो एक कोण पर स्थित है। युजिन रोबोट ने रोबोट के संशोधित आकार (अब यह आरट मॉडल की तरह गोल नहीं है) के संबंध में इस तरह के रचनात्मक समाधान को लागू करने का फैसला किया, और पहियों को केंद्र से आगे स्थानांतरित कर दिया गया है। यह पहियों की इस व्यवस्था के साथ है कि वैक्यूम क्लीनर सही ढंग से नीले रंग से बाहर निकल सकता है। हमने निर्माता से पूछा कि क्या यह पहिया चलने के त्वरित पहनने को प्रभावित करेगा। हमें बताया गया कि इस फॉर्म फैक्टर में ओमेगा मॉडल को एक साल से अधिक समय तक परीक्षण किया गया है, इस व्यवस्था के साथ पहियों को आपूर्ति की जाने वाली धारा बहुत कम बदलती है और लंबे समय तक किसी भी पहनने और आंसू पर ध्यान नहीं दिया जाएगा।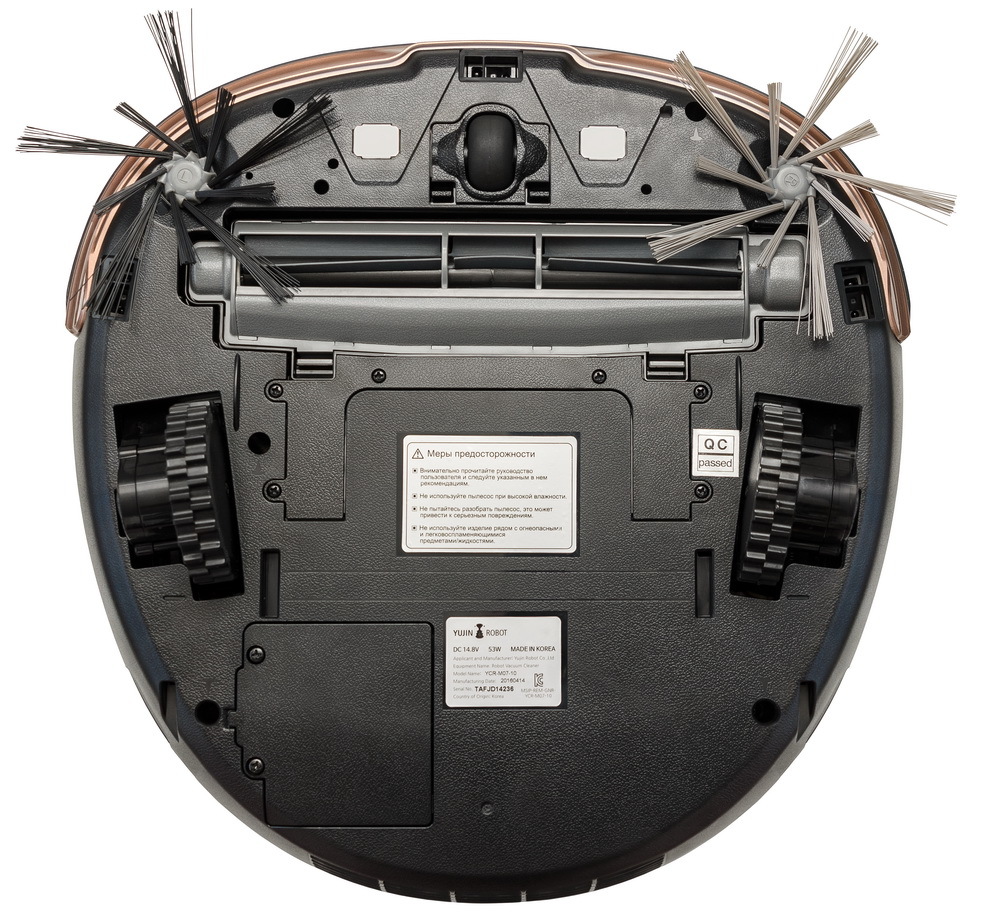 बाजार के अन्य रोबोटों से एक और अनोखा अंतर यह है कि विली की विभिन्न लंबाई के साथ 10 पंखुड़ी वाले साइड ब्रश का उपयोग होता है। अन्य रोबोटों की तुलना में ब्रश काफ़ी सख्त होते हैं। परीक्षण के दौरान, हमने विशेष रूप से कालीनों पर छोटे मलबे (चावल, ग्रेट्स) को लेने की अच्छी दक्षता का उल्लेख किया। नरम ब्रिसल ब्रशों ने कचरे को और अधिक खराब कर दिया। मुख्य ब्रश मॉड्यूल में एक अस्थायी तंत्र है। यह फर्श के समोच्च का अनुसरण करता है और इसकी सतह पर पूरी तरह से फिट बैठता है। नया रबर टर्बो ब्रश V6 ब्लेड बालों सहित किसी भी मलबे को इकट्ठा करने में बहुत अच्छा है। दुर्लभ मामलों में, बाल ब्रश पर दो केंद्रीय खांचे में घाव होते हैं, साथ ही साथ ब्रश के किनारों पर भी। असर एक बेलनाकार आवरण में छिपा हुआ है, सभी परीक्षणों के दौरान कुछ भी घाव नहीं था। उसे थोड़े प्रयास से हटा दिया जाता है, गलती से उसे खोना मुश्किल होगा।
बाजार के अन्य रोबोटों से एक और अनोखा अंतर यह है कि विली की विभिन्न लंबाई के साथ 10 पंखुड़ी वाले साइड ब्रश का उपयोग होता है। अन्य रोबोटों की तुलना में ब्रश काफ़ी सख्त होते हैं। परीक्षण के दौरान, हमने विशेष रूप से कालीनों पर छोटे मलबे (चावल, ग्रेट्स) को लेने की अच्छी दक्षता का उल्लेख किया। नरम ब्रिसल ब्रशों ने कचरे को और अधिक खराब कर दिया। मुख्य ब्रश मॉड्यूल में एक अस्थायी तंत्र है। यह फर्श के समोच्च का अनुसरण करता है और इसकी सतह पर पूरी तरह से फिट बैठता है। नया रबर टर्बो ब्रश V6 ब्लेड बालों सहित किसी भी मलबे को इकट्ठा करने में बहुत अच्छा है। दुर्लभ मामलों में, बाल ब्रश पर दो केंद्रीय खांचे में घाव होते हैं, साथ ही साथ ब्रश के किनारों पर भी। असर एक बेलनाकार आवरण में छिपा हुआ है, सभी परीक्षणों के दौरान कुछ भी घाव नहीं था। उसे थोड़े प्रयास से हटा दिया जाता है, गलती से उसे खोना मुश्किल होगा।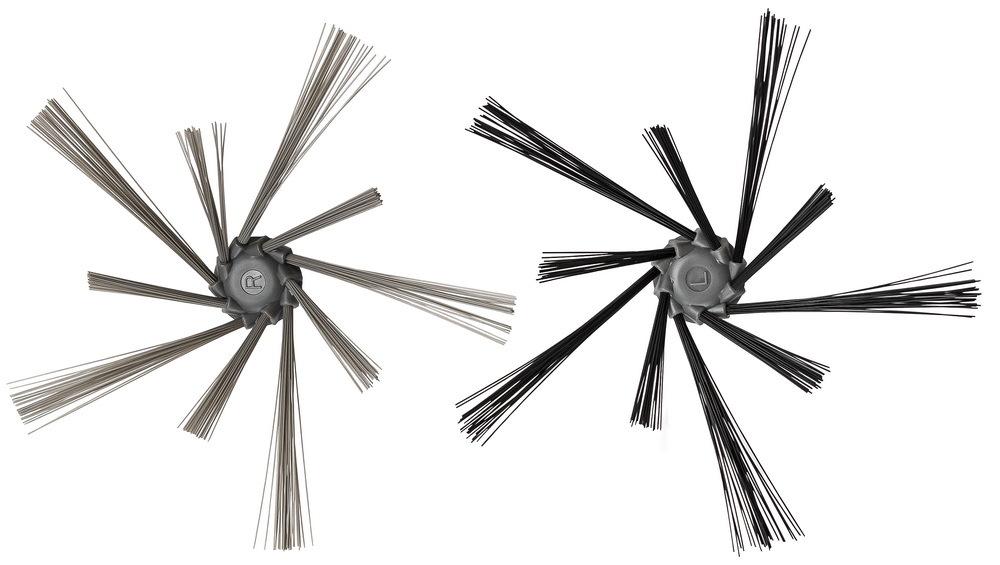
 सामने का पहिया भी आवरण के नीचे छिपा हुआ है, एक चुंबकीय सेंसर पहिया अक्ष पर स्थित है, और यात्रा की दूरी निर्धारित करने के लिए रोबोट बॉडी में एक ओडोमीटर स्थित है। पूरे डिजाइन को डिज़ाइन किया गया है ताकि उपभोक्ता रोबोट को साफ करने के लिए न्यूनतम प्रयास करे। दुर्भाग्य से, बालों का हिस्सा अनिवार्य रूप से साइड ब्रश पर घाव होगा और हर 3-4 कटाई के बाद एक बार की आवृत्ति के साथ, उन्हें सफाई के लिए निकालना आवश्यक होगा। साइड ब्रश को फास्टनरों को स्नैप करने के लिए बहुत आसानी से धन्यवाद हटाया जा सकता है। कोई शिकंजा या बोल्ट नहीं हैं। इसके अलावा नीचे से आप एक माइक्रोफ़ाइबर कपड़ा संलग्न कर सकते हैं, अब इसका आकार और भी बड़ा है। सफाई से पहले नैपकिन को पहले से सिक्त किया जा सकता है, लेकिन गीली और चिकनी सतह पर पहियों के फिसलने से बचने के लिए इसे अच्छी तरह से निचोड़ना आवश्यक है।
सामने का पहिया भी आवरण के नीचे छिपा हुआ है, एक चुंबकीय सेंसर पहिया अक्ष पर स्थित है, और यात्रा की दूरी निर्धारित करने के लिए रोबोट बॉडी में एक ओडोमीटर स्थित है। पूरे डिजाइन को डिज़ाइन किया गया है ताकि उपभोक्ता रोबोट को साफ करने के लिए न्यूनतम प्रयास करे। दुर्भाग्य से, बालों का हिस्सा अनिवार्य रूप से साइड ब्रश पर घाव होगा और हर 3-4 कटाई के बाद एक बार की आवृत्ति के साथ, उन्हें सफाई के लिए निकालना आवश्यक होगा। साइड ब्रश को फास्टनरों को स्नैप करने के लिए बहुत आसानी से धन्यवाद हटाया जा सकता है। कोई शिकंजा या बोल्ट नहीं हैं। इसके अलावा नीचे से आप एक माइक्रोफ़ाइबर कपड़ा संलग्न कर सकते हैं, अब इसका आकार और भी बड़ा है। सफाई से पहले नैपकिन को पहले से सिक्त किया जा सकता है, लेकिन गीली और चिकनी सतह पर पहियों के फिसलने से बचने के लिए इसे अच्छी तरह से निचोड़ना आवश्यक है।
रोबोट डिवाइस
मामले के निचले हिस्से में चार्जर की संपर्क प्लेटें, फर्श के स्तर को निर्धारित करने के लिए सेंसर, एक एनकोडर है जो सामने के पहिये (ओडोमीटर), और एक चुंबकीय टेप सीमक सेंसर द्वारा तय की गई दूरी को मापता है। हॉल प्रभाव के सिद्धांत के अनुसार ओडोमीटर और चुंबकीय टेप सेंसर काम करते हैं। हम वैक्यूम क्लीनर के कवर के नीचे देखते हैं और संक्षेप में मुख्य ब्लॉकों पर जाते हैं। शीर्ष कवर और फ्रंट बम्पर को खारिज करते हुए, हम रोबोट के आंतरिक भरने तक पहुंच प्राप्त करते हैं। निम्नलिखित तत्व तुरंत स्पष्ट होते हैं: ड्राइविंग पहियों, इंजन ब्लॉक, बैटरी डिब्बे, टच स्क्रीन (जिसके तहत मदरबोर्ड स्थित है) और सामने बम्पर पर सेंसर के साथ एक बोर्ड। केंद्र में एक धूल कलेक्टर है।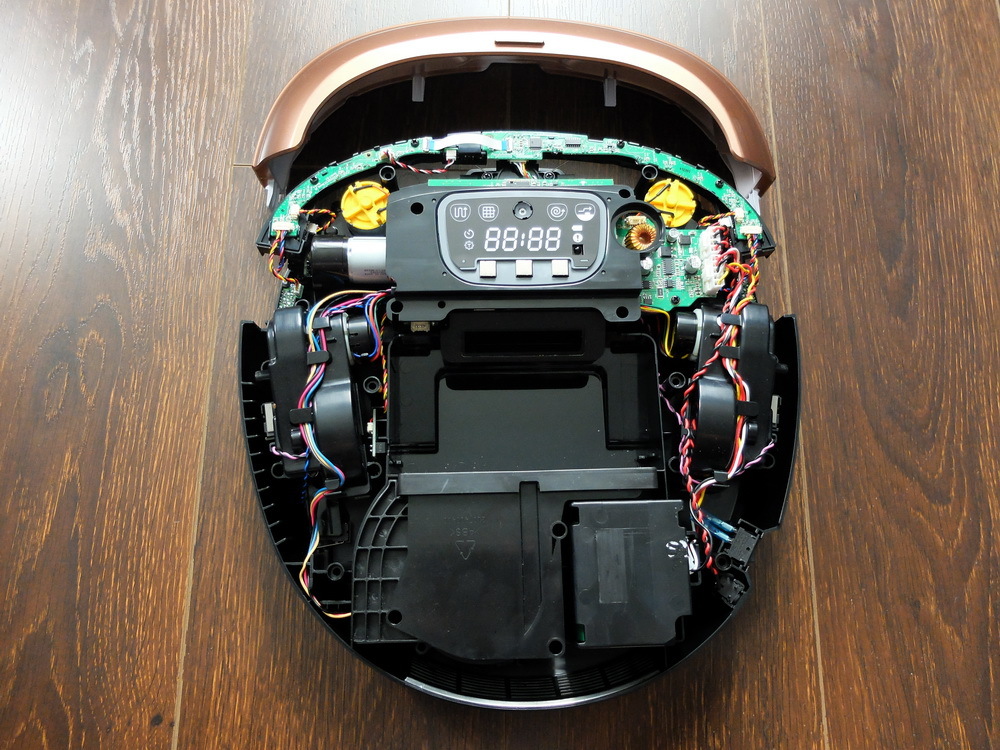 सामने का दृश्य एक गायब विदेशी उड़न तश्तरी जैसा दिखता है। इसमें वस्तुओं के लिए दूरी के लिए PSD और IR सेंसर शामिल हैं। रोबोट के शरीर पर वसंत तंत्र पर बम्पर को केंद्र में रखा गया है।
सामने का दृश्य एक गायब विदेशी उड़न तश्तरी जैसा दिखता है। इसमें वस्तुओं के लिए दूरी के लिए PSD और IR सेंसर शामिल हैं। रोबोट के शरीर पर वसंत तंत्र पर बम्पर को केंद्र में रखा गया है।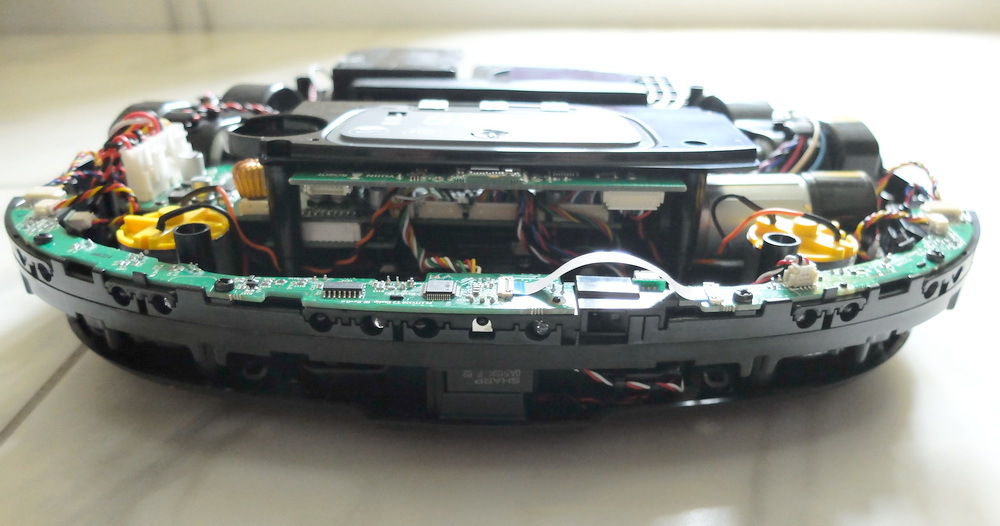 मोटर इकाई चेसिस के पीछे स्थित है। अपेक्षाकृत व्यापक ब्लेड के साथ एक ब्रशलेस मोटर कवर के नीचे छिपा हुआ है। इसके लिए धन्यवाद, सफाई के दौरान वैक्यूम क्लीनर अपने प्रतिद्वंद्वियों की तुलना में बहुत शांत है।
मोटर इकाई चेसिस के पीछे स्थित है। अपेक्षाकृत व्यापक ब्लेड के साथ एक ब्रशलेस मोटर कवर के नीचे छिपा हुआ है। इसके लिए धन्यवाद, सफाई के दौरान वैक्यूम क्लीनर अपने प्रतिद्वंद्वियों की तुलना में बहुत शांत है।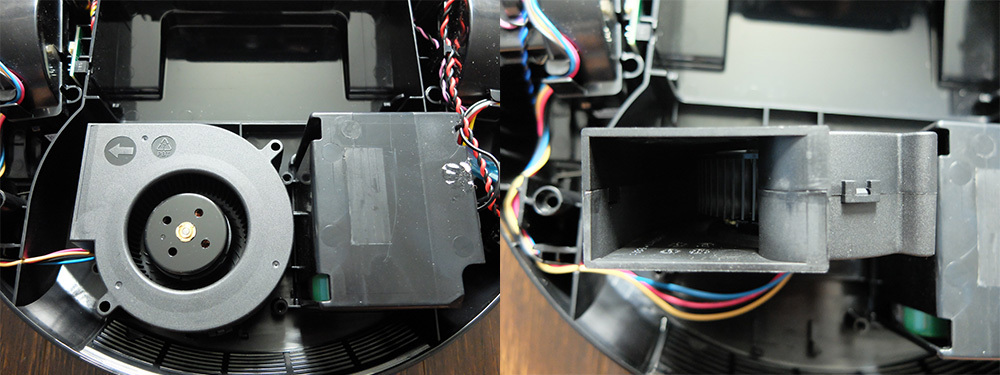 डेल्टा इलेक्ट्रॉनिक्स द्वारा निर्मित इंजन। विनिर्देशों को पीठ पर दिखाया गया है।
डेल्टा इलेक्ट्रॉनिक्स द्वारा निर्मित इंजन। विनिर्देशों को पीठ पर दिखाया गया है।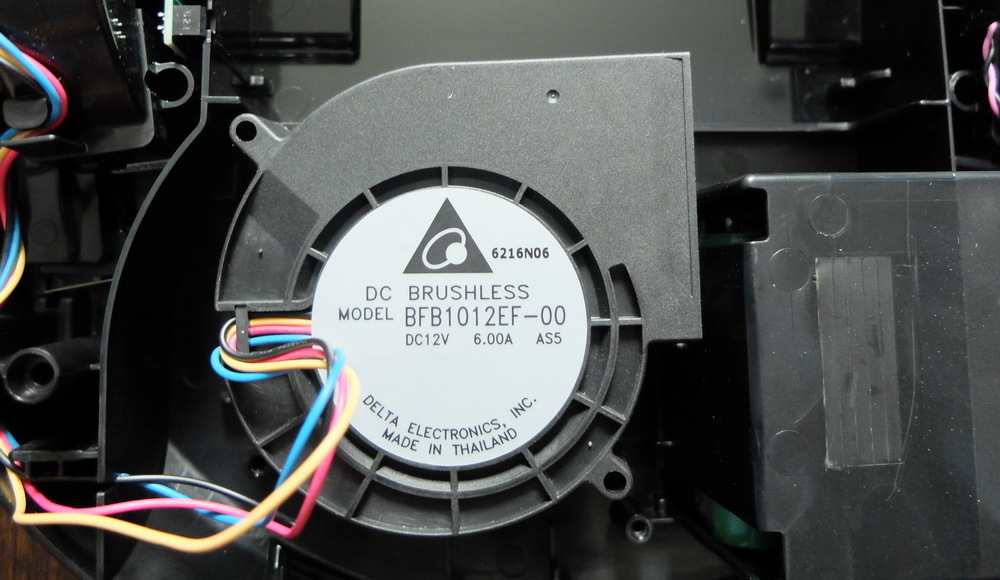 टच स्क्रीन के नीचे मुख्य मदरबोर्ड है, जिसमें नीचे से तीन-अक्ष वाला गायरो मॉड्यूल जुड़ा हुआ है, कनेक्टिंग सेंसर के लिए कनेक्टर आउटपुट हैं। बोर्ड पर स्थित माइक्रोकंट्रोलर को सभी सेंसरों से जानकारी एकत्र करने और एक्ट्यूएटर्स (व्हील ड्राइव, ब्रश, आदि) को नियंत्रित करने के लिए डिज़ाइन किया गया है। यह नेविगेशन मॉड्यूल में स्थित सॉफ्टवेयर और रोबोट के हार्डवेयर के बीच की कड़ी है। माइक्रोकंट्रोलर केंद्रीय प्रोसेसर को सभी डेटा प्रदान करता है, और इससे प्राप्त नियंत्रण आदेशों को निष्पादित करता है। केंद्रीय प्रोसेसर कैमरा मॉड्यूल के बगल में स्क्रीन कवर के तहत दूसरे मदरबोर्ड पर स्थित है। नेविगेशन मॉड्यूल लिनक्स ऑपरेटिंग सिस्टम के तहत चलता है, इसमें एक वीडियो कैमरा होता है और रोबोट के अन्य सभी घटकों के साथ संचार के लिए इंटरफेस होता है।ऑपरेशन का सिद्धांत SLAM (एक साथ स्थान और मानचित्रण) तकनीक पर आधारित है - एक अज्ञात स्थान में एक मानचित्र बनाने के लिए रोबोट द्वारा उपयोग किए जाने वाले एक साथ नेविगेशन और मानचित्र संकलन की एक विधि, जबकि साथ ही साथ वर्तमान स्थान और दूरी की निगरानी की जाती है। सॉफ़्टवेयर को अपडेट करने के लिए कनेक्टर को धूल कलेक्टर डिब्बे में लाया जाता है, लेकिन वैक्यूम क्लीनर को केवल सेवा केंद्र में एक विशेष प्रोग्रामर का उपयोग करके फ्लैश किया जा सकता है।
टच स्क्रीन के नीचे मुख्य मदरबोर्ड है, जिसमें नीचे से तीन-अक्ष वाला गायरो मॉड्यूल जुड़ा हुआ है, कनेक्टिंग सेंसर के लिए कनेक्टर आउटपुट हैं। बोर्ड पर स्थित माइक्रोकंट्रोलर को सभी सेंसरों से जानकारी एकत्र करने और एक्ट्यूएटर्स (व्हील ड्राइव, ब्रश, आदि) को नियंत्रित करने के लिए डिज़ाइन किया गया है। यह नेविगेशन मॉड्यूल में स्थित सॉफ्टवेयर और रोबोट के हार्डवेयर के बीच की कड़ी है। माइक्रोकंट्रोलर केंद्रीय प्रोसेसर को सभी डेटा प्रदान करता है, और इससे प्राप्त नियंत्रण आदेशों को निष्पादित करता है। केंद्रीय प्रोसेसर कैमरा मॉड्यूल के बगल में स्क्रीन कवर के तहत दूसरे मदरबोर्ड पर स्थित है। नेविगेशन मॉड्यूल लिनक्स ऑपरेटिंग सिस्टम के तहत चलता है, इसमें एक वीडियो कैमरा होता है और रोबोट के अन्य सभी घटकों के साथ संचार के लिए इंटरफेस होता है।ऑपरेशन का सिद्धांत SLAM (एक साथ स्थान और मानचित्रण) तकनीक पर आधारित है - एक अज्ञात स्थान में एक मानचित्र बनाने के लिए रोबोट द्वारा उपयोग किए जाने वाले एक साथ नेविगेशन और मानचित्र संकलन की एक विधि, जबकि साथ ही साथ वर्तमान स्थान और दूरी की निगरानी की जाती है। सॉफ़्टवेयर को अपडेट करने के लिए कनेक्टर को धूल कलेक्टर डिब्बे में लाया जाता है, लेकिन वैक्यूम क्लीनर को केवल सेवा केंद्र में एक विशेष प्रोग्रामर का उपयोग करके फ्लैश किया जा सकता है।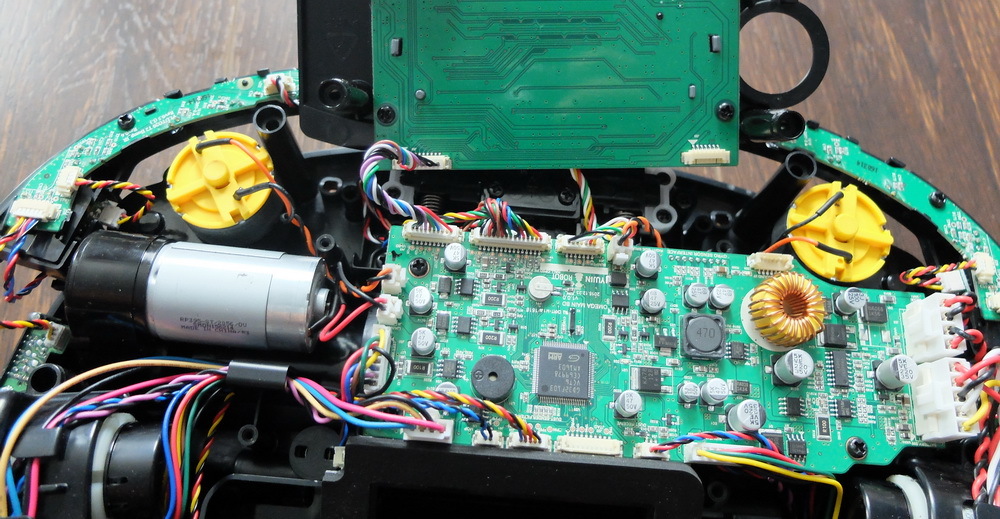
ICLEBO ओमेगा और iCLEBO Arte की तुलना करें
पिछला एर्ट मॉडल 2013 से रूसी बाजार में है। ओमेगा मॉडल को खरोंच से विकसित किया गया था और कई घटकों में सुधार किया गया है, लेकिन यह पूरी तरह से अर्टे को प्रतिस्थापित नहीं कर सकता है, बल्कि प्रत्येक रोबोट अपनी आवश्यकताओं और आवश्यकताओं के लिए उपयुक्त है। अब हम समझेंगे क्यों।
| 
|
75 वर्ग मीटर तक के कालीनों, महीन धूल और जानवरों के बालों के साथ घेरा। एम। (या दो सफाई चक्रों में 150 वर्ग मीटर तक)
| किसी भी चिकनी सतहों पर प्रभावी, 150 वर्ग मीटर तक बड़े कमरे के लिए उपयुक्त। मी। (या दो सफाई चक्रों में 300 वर्ग मीटर तक), बाजार के सबसे मूक रोबोटों में से एक है
|
| VSLAM + NST नेविगेशन टेक्नोलॉजी + जाइरोस्कोप + ओडोमीटर + सेंसर | VSLAM नेविगेशन तकनीक + जाइरोस्कोप + ओडोमीटर + सेंसर
|
| : , , , , | : , , , |
| : (), ( ), . , 30%. | : (), ( + ), , , ( ). |
| : , , , , , , , , (, ). 35 . | : , , , , , (, ). 25 . |
| Li-Ion 4400 mAh. 80 Auto (60 ). 180 . | Li-Ion 2200 mAh. 120 . 110 . |
| 10- . : V6 Blade | 3- . : +
|
| : 68 | : 55 |
| : , , HEPA-, , , , , , | : , , HEPA-, , , , , , |
मुख्य अंतर तालिका में दिए गए हैं। जैसा कि आप देख सकते हैं, कई मायनों में नया ओमेगा मॉडल अर्टे से आगे है, लेकिन कमजोरियां भी हैं, उदाहरण के लिए, अर्टे बड़े कमरे में 300 वर्ग मीटर तक के सफाई क्षेत्र के साथ काम करने में सक्षम होंगे। ओमेगा की तुलना में मीटर घमंड नहीं कर पाएंगे। Arte काफी शांत है, आप सुरक्षित रूप से टीवी देख सकते हैं जबकि वैक्यूम क्लीनर चल रहा है। प्रतियोगियों की तुलना में ओमेगा बहुत जोर से नहीं है, लेकिन फोन पर बात करना बहुत आरामदायक नहीं होगा। सामान्य तौर पर, Arte एक उत्कृष्ट रोबोट है, अगर इसका उपयोग मुख्य रूप से चिकनी फर्श पर और छोटे बालों वाले पालतू जानवरों के साथ किया जाता है। ओमेगा, इसके विपरीत, कालीनों पर अच्छी तरह से काम करता है और आसानी से लंबे बालों वाले जानवरों के बाल उठाता है। यहां यह ध्यान दिया जाना चाहिए कि हम कम ढेर कालीनों के बारे में बात कर रहे हैं। उच्च ढेर के साथ कालीनों पर, बाजार में कोई भी रोबोट काम नहीं करेगा (या उस पर पर्ची करना बेकार होगा)।लाइन में एक छोटा मॉडल भी है - iCLEBO पॉप। उसके पास कमरे का नक्शा बनाने की तकनीक नहीं है, इसलिए यह मॉडल 60 वर्ग मीटर तक के छोटे अपार्टमेंट के लिए उपयुक्त है। मीटर है। इन अपार्टमेंटों में, अपने 2 घंटे के संचालन के लिए, उच्च स्तर की संभावना के साथ एक वैक्यूम क्लीनर पूरे उपलब्ध क्षेत्र को साफ करने में सक्षम होगा।
परीक्षण
हमने एक रोबोट वैक्यूम क्लीनर की सबसे महत्वपूर्ण विशेषता पर कई परीक्षण किए - सफाई की गुणवत्ता। चूंकि iCLEBO ओमेगा में कमरे का नक्शा बनाने की क्षमता है, इसलिए इसे बड़े क्षेत्र में लॉन्च करने का कोई मतलब नहीं है - यह वैसे भी कहीं भी जाएगा। भविष्य में, कई टॉप रोबोटों की तुलना रूम मैपिंग सिस्टम के साथ करना आसान होगा, चिकनी फर्श और कालीनों पर अलग-अलग कमरों में कचरा बिखेरना। इस बीच, हम सीमित स्थान पर कालीनों पर प्रश्न में मॉडल की सफाई की गुणवत्ता पर ध्यान केंद्रित करते हैं। हमने लगभग 1 मीटर की दूरी पर ऑपरेशन के दौरान शोर के स्तर को भी मापा। यह सामान्य मोड में 66 डीबी और टर्बो मोड में 68 डीबी से अधिक नहीं था। दुर्भाग्य से, परीक्षण अपार्टमेंट में कोई पालतू जानवर नहीं हैं, लेकिन 50 सेमी तक के बालों वाली एक महिला है। यह ध्यान देने योग्य है कि लगभग सभी बाल कंटेनर में आते हैं, लेकिन कुछ अभी भी ब्रश के किनारे पर और ब्रश के बीच में दो खांचे पर घाव हो सकते हैं। छोटे बाल और ऊन धूल कलेक्टर में गिर जाएंगे, उच्च चूषण प्रवाह और टर्बो ब्रश पर ब्रिसल्स की अनुपस्थिति के कारण उन्हें हवा देने का समय नहीं होगा। इसके अलावा, लंबे बालों का हिस्सा साइड ब्रश पर मिल सकता है और उन्हें समय-समय पर साफ करने की भी आवश्यकता होती है। रोबोट का तल लगभग पूरी तरह से साफ है, धूल उस पर नहीं बैठती है। परीक्षणों में, हमने पूरे कमरे में चीनी को बिखेर दिया और वैक्यूम क्लीनर के एक पास में 100 ग्राम चीनी एकत्र करने की प्रभावशीलता को मापा। इस तथ्य के कारण कि साइड ब्रश के प्रभाव से मलबे का एक हिस्सा खराब हो जाता है, एक पास में दक्षता परिणाम के 100% तक नहीं पहुंच पाएगी।हमारे परीक्षण में, वैक्यूम क्लीनर ने फर्श पॉलिशर मॉड्यूल (गीले मोपिंग) के बिना एक पास में कमरे में 94% चीनी एकत्र की। बेशक, अगर कचरा सीधे अपने रास्ते पर झूठ होगा, तो दक्षता लगभग 100% होगी। हमने यह जांच की, दोनों छोटे कचरे (सूजी), और बड़े (किशमिश) पर। दूसरी ओर, कालीन पर एक ही प्रकार का मलबा साइड ब्रश से दूर नहीं बिखरता है और उस पर iCLEBO ने उच्च सक्शन पावर - 95% के कारण भी सबसे अच्छा परिणाम दिखाया है। विभिन्न प्रकार के अनाज के साथ कालीन पर परीक्षण के परिणाम तालिका में प्रस्तुत किए गए हैं:कालीन पर मलबे का एक ही प्रकार साइड ब्रश से दूर नहीं बिखरता है और उस पर iCLEBO ने उच्च सक्शन बल के कारण सबसे अच्छा परिणाम भी दिखाया - 95%। विभिन्न प्रकार के अनाज के साथ कालीन पर परीक्षण के परिणाम तालिका में प्रस्तुत किए गए हैं:कालीन पर मलबे का एक ही प्रकार साइड ब्रश से दूर नहीं बिखरता है और उस पर iCLEBO ने उच्च सक्शन बल के कारण सबसे अच्छा परिणाम भी दिखाया - 95%। विभिन्न प्रकार के अनाज के साथ कालीन पर परीक्षण के परिणाम तालिका में प्रस्तुत किए गए हैं:
दुर्भाग्य से, परीक्षण अपार्टमेंट में कोई पालतू जानवर नहीं हैं, लेकिन 50 सेमी तक के बालों वाली एक महिला है। यह ध्यान देने योग्य है कि लगभग सभी बाल कंटेनर में आते हैं, लेकिन कुछ अभी भी ब्रश के किनारे पर और ब्रश के बीच में दो खांचे पर घाव हो सकते हैं। छोटे बाल और ऊन धूल कलेक्टर में गिर जाएंगे, उच्च चूषण प्रवाह और टर्बो ब्रश पर ब्रिसल्स की अनुपस्थिति के कारण उन्हें हवा देने का समय नहीं होगा। इसके अलावा, लंबे बालों का हिस्सा साइड ब्रश पर मिल सकता है और उन्हें समय-समय पर साफ करने की भी आवश्यकता होती है। रोबोट का तल लगभग पूरी तरह से साफ है, धूल उस पर नहीं बैठती है। परीक्षणों में, हमने पूरे कमरे में चीनी को बिखेर दिया और वैक्यूम क्लीनर के एक पास में 100 ग्राम चीनी एकत्र करने की प्रभावशीलता को मापा। इस तथ्य के कारण कि साइड ब्रश के प्रभाव से मलबे का एक हिस्सा खराब हो जाता है, एक पास में दक्षता परिणाम के 100% तक नहीं पहुंच पाएगी।हमारे परीक्षण में, वैक्यूम क्लीनर ने फर्श पॉलिशर मॉड्यूल (गीले मोपिंग) के बिना एक पास में कमरे में 94% चीनी एकत्र की। बेशक, अगर कचरा सीधे अपने रास्ते पर झूठ होगा, तो दक्षता लगभग 100% होगी। हमने यह जांच की, दोनों छोटे कचरे (सूजी), और बड़े (किशमिश) पर। दूसरी ओर, कालीन पर एक ही प्रकार का मलबा साइड ब्रश से दूर नहीं बिखरता है और उस पर iCLEBO ने उच्च सक्शन पावर - 95% के कारण भी सबसे अच्छा परिणाम दिखाया है। विभिन्न प्रकार के अनाज के साथ कालीन पर परीक्षण के परिणाम तालिका में प्रस्तुत किए गए हैं:कालीन पर मलबे का एक ही प्रकार साइड ब्रश से दूर नहीं बिखरता है और उस पर iCLEBO ने उच्च सक्शन बल के कारण सबसे अच्छा परिणाम भी दिखाया - 95%। विभिन्न प्रकार के अनाज के साथ कालीन पर परीक्षण के परिणाम तालिका में प्रस्तुत किए गए हैं:कालीन पर मलबे का एक ही प्रकार साइड ब्रश से दूर नहीं बिखरता है और उस पर iCLEBO ने उच्च सक्शन बल के कारण सबसे अच्छा परिणाम भी दिखाया - 95%। विभिन्न प्रकार के अनाज के साथ कालीन पर परीक्षण के परिणाम तालिका में प्रस्तुत किए गए हैं:| कचरा का प्रकार, सतह - कालीन | प्रभावशीलता |
| चावल | 100% |
| चीनी | 95% |
| Munk | 82% |
जैसा कि आप तालिका से देख सकते हैं, परिणाम बहुत अच्छे हैं, यह देखते हुए कि हमारे पास एक पूर्ण कालीन कालीन है, न कि कालीन। यहां तक कि सूजी के रूप में सबसे छोटे ग्रेट्स, रोबोट बहुत प्रभावी ढंग से एकत्र करता है। हमने 20 वर्ग मीटर के एक कमरे में गीले मॉपिंग मोड में वैक्यूम क्लीनर शुरू किया। मीटर, नैपकिन पूरे सफाई चक्र के दौरान गीला रहता था और इसके पीछे एक गीला ट्रेस दिखाई देता था। नीचे एक छोटी समीक्षा और परीक्षण के साथ एक वीडियो है।निष्कर्ष
अपने नए उत्पाद में कोरियाई कंपनी युजिन रोबोट उच्च चूषण शक्ति पर निर्भर थी और उच्च गुणवत्ता वाले गुणवत्ता के परिणाम प्राप्त किए। यदि लोकप्रिय iCLEBO Arte मॉडल अच्छी निष्क्रियता (20 मिमी तक की दहलीज पर काबू पा), कम शोर स्तर (केवल 55 डीबी), एक बड़ा सफाई क्षेत्र (दो चक्रों में 300 वर्ग मीटर तक) का दावा कर सकता है, तो निर्माता ओमेगा की उपलब्धि पर ध्यान केंद्रित करता है। उच्च परिणाम जब कालीनों पर सफाई और रखरखाव में आसानी (ब्रश पर लगभग कोई बाल घाव नहीं है)। किसी भी स्थिति में, रोबोट वैक्यूम क्लीनर को विशेष रूप से आपकी आवश्यकताओं और आवश्यकताओं के लिए चुना जाना चाहिए, कमरे के इंटीरियर और उत्पाद के उपयोग की शर्तों को ध्यान में रखते हुए।युपीडी। आप युजिन रोबोट प्रतिनिधि साइट पर iCLEBO ओमेगा को प्री-ऑर्डर कर सकते हैं , रूस में बिक्री सितंबर के अंत में शुरू होती है। Source: https://habr.com/ru/post/hi396613/
All Articles