रेसिंग कॉप्टर का निर्माण कैसे करें और थकें नहीं
कई लोग ZMR250 फ्रेम पर मल्टी-रोटर रेसिंग क्वाड्रोकॉप्टर के निर्माण के विषय में रुचि रखते हैं, लेकिन जैसे ही आप विषय की खोज शुरू करते हैं, आप बस एक विशिष्ट जानकारी की खोज करते हैं जो केवल नए लोगों को डरा सकती है, लेकिन किसी भी तरह से मदद नहीं कर सकती है।इस लेख में, मैं साझा करना चाहूंगा कि मेरी राय में इन जंगली उपकरणों पर उड़ान शुरू करने के लिए सबसे सही और आसान कदम क्या होगा।
क्या कर रहे हैं quadrocopters रेसिंग
यह उड़ने वाले वाहनों की एक पूरी तरह से अलग श्रेणी है। उनकी मुख्य विशेषताओं में शामिल हैं:- छोटे आकार। ZMR250 नाम का मतलब है कि डिवाइस का विकर्ण आकार 250 मिमी है। बैटरी और कैमरे के बिना वजन आमतौर पर 400 ग्राम से अधिक नहीं होता है
- न्यूनतम सक्रिय स्थिरीकरण
- जगह-जगह मंडराने के बजाय आक्रामक प्रबंधन और निरंतर आंदोलन पर ध्यान दें
- FPV उपकरण और एक्शन कैमरा ले जा सकता है
- कई बूंदों के लिए मजबूत डिजाइन
इंजीनियरिंग के दृष्टिकोण से, यह काफी सरल है और पायलट को अधिकतम नियंत्रण प्रदान करता है। यह रेंज, अवधि या ऊंचाई के लिए रिकॉर्ड सेट करने के लिए अच्छी तरह से अनुकूल नहीं है। एक अच्छे पक्षी की आंख से देखने के लिए यह बहुत मुश्किल है। लेकिन आपको पायलटिंग प्रक्रिया से बहुत आनंद मिलेगा और चक्कर आने वाले वीडियो शूट करने में सक्षम होंगे!निर्माण के लिए क्या आवश्यक है
तैयार सेट
विशिष्ट लोहे के एक सेट के लिए, प्रत्येक अनुभवी पायलट की अपनी राय होगी। राम, गति नियंत्रक, इंजन, उड़ान नियंत्रक, रेडियो नियंत्रण उपकरण, बैटरी, आदि। एक विशाल विविधता और हर कोई आपको कुछ अलग करने की सलाह देगा।मुझे पूरा विश्वास है कि इन सभी रायों को समझने की अपेक्षा रेडीमेड किट खरीदना आसान है और आपको 80% क्या मिलेगा जो उन्नत पायलटों के पास है! इस तरह से सोचते हुए, मैं एलीएक्सप्रेस पर चढ़ गया और उन घटकों का सबसे सस्ता सेट खरीदा जो मुझे मिल सकता था।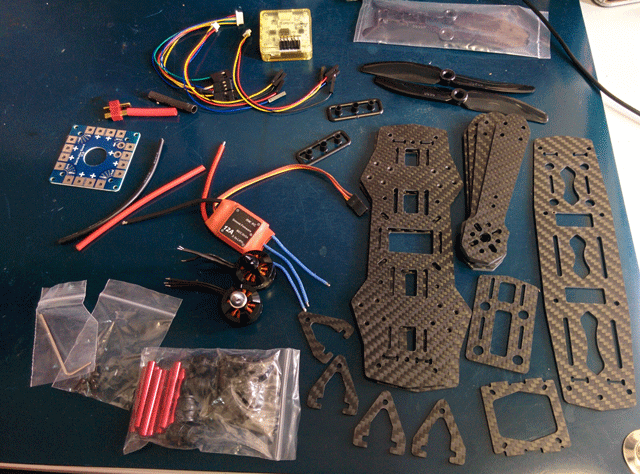 अनिवार्य रूप से, इसमें बैटरी और रेडियो नियंत्रण उपकरण के अपवाद के साथ आपके पास निर्माण के लिए आवश्यक सभी चीजें हैं। यही है, पैसे के लिए आपको एक फ्रेम मिलता है, इंजन नियामकों का एक सेट, इंजन खुद, एक उड़ान नियंत्रक और कुछ अन्य छोटी चीजें।कुल $ 70।
अनिवार्य रूप से, इसमें बैटरी और रेडियो नियंत्रण उपकरण के अपवाद के साथ आपके पास निर्माण के लिए आवश्यक सभी चीजें हैं। यही है, पैसे के लिए आपको एक फ्रेम मिलता है, इंजन नियामकों का एक सेट, इंजन खुद, एक उड़ान नियंत्रक और कुछ अन्य छोटी चीजें।कुल $ 70।बैटरी अर्थव्यवस्था
कॉप्टर को LiPo बैटरी की आवश्यकता होगी। मेरे सेट से इंजन बहुत ज्यादा खपत नहीं करते हैं और मैंने उन पर उड़ान भरने का फैसला किया है जो मेरे पास पहले से ही थे - 2200mAh, 3S, 20-30C। यदि आपके पास पहले से समान बैटरी है, तो आप दूसरों को नहीं खरीद सकते हैं। यदि आपके पास कोई नहीं है, तो उन्हें एलाइक्सप्रेस पर खरीदना मुश्किल होगा, लेकिन आप कर सकते हैं। मैं विश्वसनीय आपूर्तिकर्ताओं से बैटरी खरीदने की सलाह दूंगा। उदाहरण के लिए, ये । उनमें से दो को लेना बेहतर है।उन्हें एक विशेष चार्जर की आवश्यकता होगी। सबसे लोकप्रिय है iMAX B6 । कृपया ध्यान दें कि यह नेटवर्क से संचालित नहीं है, लेकिन 12V बिजली की आपूर्ति से। बैटरी की स्थिति की निगरानी के लिए आपको एक सस्ती परीक्षक की भी आवश्यकता होगी ।कुल $ 54। मुझे आपको फिर से याद दिलाना है कि बैटरी का उपयोग अन्य उद्देश्यों के लिए किया जा सकता है।रेडियो नियंत्रण उपकरण
फिर, यदि आपके पास कोई उपयुक्त उपकरण नहीं है, तो यह किट लेने के लिए समझ में आता है, जिसमें तुरंत ट्रांसमीटर भी शामिल है। उदाहरण के लिए, यहां $ 109 के लिए एक है ।यदि आप अभी भी आरयू प्रणाली को अलग से खरीदना चाहते हैं, तो शायद सबसे कम विकल्प $ 44 के लिए फ्लाईस्की है । हम सबसे आम में से एक का उपयोग करते हैं, लेकिन अधिक महंगा टर्नजी 9x रिमोट है, जिसकी कीमत लगभग $ 70 + शिपिंग है।शिकंजा
एक बहुत छोटा लेकिन महत्वपूर्ण बिंदु। वे लगभग हर दुर्घटना के साथ लगातार टूटेंगे, जिनमें से कई होंगे। पहली उड़ानों के लिए, मैं सिर्फ $ 2.2 के लिए सबसे सस्ता प्रोपेलर के पांच सेट खरीदूंगा ।कुल मिलाकर
अंततः, यदि आपके पास पहले कुछ नहीं था, तो बहुत न्यूनतम निवेश $ 175 है। मुझे यकीन है कि सामान्य रूप से रेसिंग कॉपर्स के बारे में सीखना शुरू करने के लिए यह एक शानदार शुरुआत है।कॉप्टर असेंबली
यह कुछ भी जटिल नहीं है और यहां तक कि न्यूनतम सोल्डरिंग कौशल वाला व्यक्ति भी सामना करने में सक्षम होगा।पहले चरण में, फ्रेम को इकट्ठा किया जाता है, इंजन और गति नियंत्रक स्थापित होते हैं। और इसलिए, अंत में, इसे बाहर करना चाहिए: इस तस्वीर में दिखाई देने वाली सबसे महत्वपूर्ण बात यह है कि बाएं सामने और दाएं रियर इंजन को दक्षिणावर्त घुमाना चाहिए (उन्हें काले स्क्रू क्लैंप नट द्वारा इंगित किया जाएगा)। दाएं सामने और बाएं रियर इंजन को वामावर्त घूमना चाहिए और उनके पास एक चांदी का अखरोट होगा। इन नटों में, वैसे, धागे की दिशा उनके अनजाने को रोकती है।अब बात करते हैं कनेक्टिंग इंजन की।यह सब मोटर और यात्रा नियंत्रक (ईएससी) के तारों को टांका लगाकर एक सरल तरीके से किया जा सकता है, लेकिन हमने उन्हें कम करने का फैसला किया। ऐसा करने के लिए, सभी नियामकों से पहले हटना हटा दिया जाता है।
इस तस्वीर में दिखाई देने वाली सबसे महत्वपूर्ण बात यह है कि बाएं सामने और दाएं रियर इंजन को दक्षिणावर्त घुमाना चाहिए (उन्हें काले स्क्रू क्लैंप नट द्वारा इंगित किया जाएगा)। दाएं सामने और बाएं रियर इंजन को वामावर्त घूमना चाहिए और उनके पास एक चांदी का अखरोट होगा। इन नटों में, वैसे, धागे की दिशा उनके अनजाने को रोकती है।अब बात करते हैं कनेक्टिंग इंजन की।यह सब मोटर और यात्रा नियंत्रक (ईएससी) के तारों को टांका लगाकर एक सरल तरीके से किया जा सकता है, लेकिन हमने उन्हें कम करने का फैसला किया। ऐसा करने के लिए, सभी नियामकों से पहले हटना हटा दिया जाता है।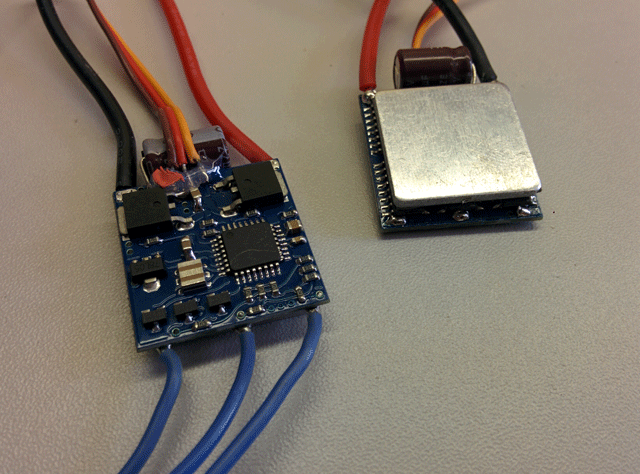 एक तरफ नियंत्रक स्वयं है, और दूसरी तरफ एक रेडिएटर के साथ चाबियाँ हैं। हमने मानक तारों को मिलाया, मोटर तारों को वांछित लंबाई में कटौती की और फिर उन्हें बोर्ड में मिलाप किया।
एक तरफ नियंत्रक स्वयं है, और दूसरी तरफ एक रेडिएटर के साथ चाबियाँ हैं। हमने मानक तारों को मिलाया, मोटर तारों को वांछित लंबाई में कटौती की और फिर उन्हें बोर्ड में मिलाप किया।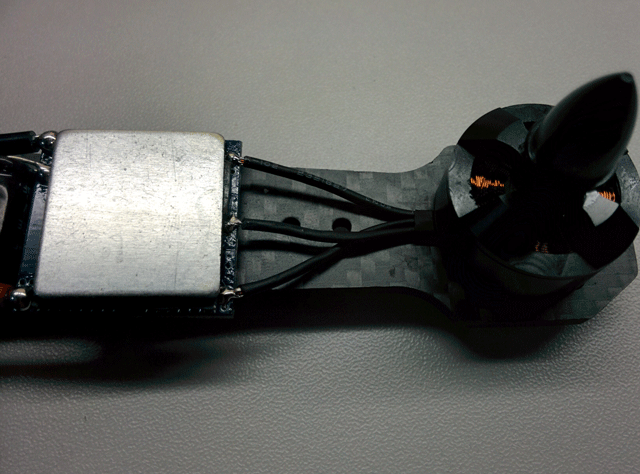 इस बिंदु पर, जांचें कि जुड़ा हुआ मोटर वास्तव में सही दिशा में घूम रहा है। यह कैसे करना है:
इस बिंदु पर, जांचें कि जुड़ा हुआ मोटर वास्तव में सही दिशा में घूम रहा है। यह कैसे करना है:- इंजन से पेंच को हटा दें, अगर कोई स्थापित किया गया है!
- फ्रेम वर्तमान का संचालन करता है, इसलिए फ्रेम से ईएससी को इन्सुलेट करें
- आरयू सिस्टम के रिसीवर के गैस चैनल से स्पीड कंट्रोल को कनेक्ट करें और रिमोट कंट्रोल को चालू करें।
गैस स्टिक को लोअर पोजिशन पर रखें। - ध्रुवीयता का निरीक्षण करते हुए ईएससी शक्ति को कनेक्ट करें
- इंजन कताई शुरू होने तक थोड़ी गैस जोड़ें।
- यदि इंजन गलत दिशा में घूमता है, तो इंजन के किसी भी दो तारों को इंटरचेंज करना आवश्यक है
इंजन को दक्षता के लिए जांचने के बाद, गति नियंत्रण पर एक गर्मी हटना ट्यूबिंग डाला जा सकता है।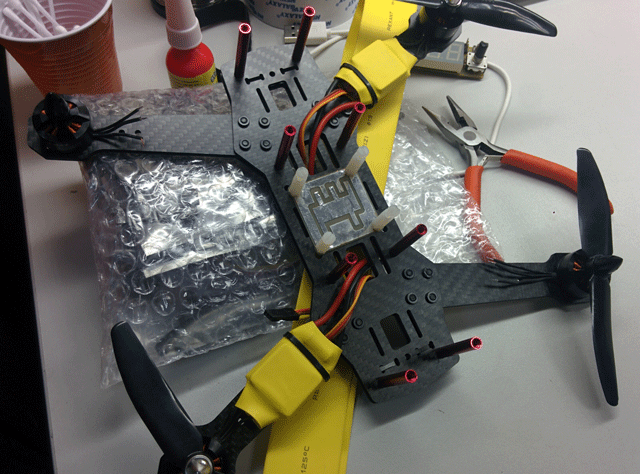 कृपया ध्यान दें कि हमने किट से बिजली वितरण बोर्ड का उपयोग नहीं किया है। हमारे पास पतली पन्नी में लिपटे फाइबर ग्लास के स्टॉक थे, जिसमें से हमने एक साधारण पैच बोर्ड बनाया था।
कृपया ध्यान दें कि हमने किट से बिजली वितरण बोर्ड का उपयोग नहीं किया है। हमारे पास पतली पन्नी में लिपटे फाइबर ग्लास के स्टॉक थे, जिसमें से हमने एक साधारण पैच बोर्ड बनाया था। इस बोर्ड पर, गति नियंत्रकों के सभी प्लस और माइनस तारों को क्रमशः बैटरी कनेक्टर के प्लस और माइनस तारों के साथ जोड़ा जाना चाहिए। इस बोर्ड को अलग करने की आवश्यकता है और हमने इसे साधारण नेल पॉलिश के साथ किया है:
इस बोर्ड पर, गति नियंत्रकों के सभी प्लस और माइनस तारों को क्रमशः बैटरी कनेक्टर के प्लस और माइनस तारों के साथ जोड़ा जाना चाहिए। इस बोर्ड को अलग करने की आवश्यकता है और हमने इसे साधारण नेल पॉलिश के साथ किया है: हमारे उपकरण का रिसीवर काफी बड़ा है:
हमारे उपकरण का रिसीवर काफी बड़ा है: हमने इसे मामले को हटाने का फैसला किया, इसमें से पुराने तारों को मिलाया और मोटर से तारों को सीधे बोर्ड में मिलाप किया। अनावश्यक गलतियों को रोकने के लिए पहले चरण में ऐसा करना आसान नहीं है। अब हम एक उड़ान नियंत्रक स्थापित करने और रिसीवर के साथ गति नियंत्रकों को जोड़ने के लिए तैयार हैं। इसे स्थापित करते समय, दिशा "आगे" का संकेत देने वाले तीर पर ध्यान दें।
हमने इसे मामले को हटाने का फैसला किया, इसमें से पुराने तारों को मिलाया और मोटर से तारों को सीधे बोर्ड में मिलाप किया। अनावश्यक गलतियों को रोकने के लिए पहले चरण में ऐसा करना आसान नहीं है। अब हम एक उड़ान नियंत्रक स्थापित करने और रिसीवर के साथ गति नियंत्रकों को जोड़ने के लिए तैयार हैं। इसे स्थापित करते समय, दिशा "आगे" का संकेत देने वाले तीर पर ध्यान दें। चैनल को रिसीवर से जोड़ने का क्रम मायने नहीं रखता है, यह कॉन्फ़िगरेशन के दौरान (और बाद में) निर्दिष्ट किया जा सकता है। रिसीवर को शक्ति को ठीक से कनेक्ट करने के लिए केवल महत्वपूर्ण है। उड़ान नियंत्रक के साथ शामिल रिसीवर के लिए कनेक्टर के साथ एक केबल है। इस केबल में, पहला तार काला होना चाहिए और रिसीवर की शक्ति के नकारात्मक से जुड़ा होना चाहिए। दूसरी केबल लाल है और इसे रिसीवर की प्लस पावर के साथ जोड़ा जाना चाहिए। शेष तार रिसीवर के सभी चैनलों (कम से कम पहले चार) के क्रम में कनेक्ट होते हैं।नियामकों को जोड़ने से पहले एक और बात करनी होगी। ये नियामक फ्लाइट कंट्रोलर को पावर देने के लिए स्टेबलाइजर्स से लैस होते हैं और आपको उन सभी को एक बार में कनेक्ट करने की आवश्यकता नहीं होती है। एक को चुनना आवश्यक है और इसके कनेक्टर को अपरिवर्तित नियंत्रक से कनेक्ट करना छोड़ दें, और अन्य सभी पर, मध्य तार को हटा दें और इसे अलग करें। ऊपर की तस्वीर में देखें कि यह कैसे किया जाता है।गति नियंत्रक बहुत सरलता से जुड़े हुए हैं। पहले चैनल के सामने लेफ्ट (फोटो में सबसे बाएं कनेक्टर), और फिर क्लॉकवाइज: दूसरे के सामने राइट, तीसरे में राइट रियर और चौथे में लेफ्ट रियर।अब सभी आवश्यक तत्व एक साथ एकत्रित किए गए हैं:
चैनल को रिसीवर से जोड़ने का क्रम मायने नहीं रखता है, यह कॉन्फ़िगरेशन के दौरान (और बाद में) निर्दिष्ट किया जा सकता है। रिसीवर को शक्ति को ठीक से कनेक्ट करने के लिए केवल महत्वपूर्ण है। उड़ान नियंत्रक के साथ शामिल रिसीवर के लिए कनेक्टर के साथ एक केबल है। इस केबल में, पहला तार काला होना चाहिए और रिसीवर की शक्ति के नकारात्मक से जुड़ा होना चाहिए। दूसरी केबल लाल है और इसे रिसीवर की प्लस पावर के साथ जोड़ा जाना चाहिए। शेष तार रिसीवर के सभी चैनलों (कम से कम पहले चार) के क्रम में कनेक्ट होते हैं।नियामकों को जोड़ने से पहले एक और बात करनी होगी। ये नियामक फ्लाइट कंट्रोलर को पावर देने के लिए स्टेबलाइजर्स से लैस होते हैं और आपको उन सभी को एक बार में कनेक्ट करने की आवश्यकता नहीं होती है। एक को चुनना आवश्यक है और इसके कनेक्टर को अपरिवर्तित नियंत्रक से कनेक्ट करना छोड़ दें, और अन्य सभी पर, मध्य तार को हटा दें और इसे अलग करें। ऊपर की तस्वीर में देखें कि यह कैसे किया जाता है।गति नियंत्रक बहुत सरलता से जुड़े हुए हैं। पहले चैनल के सामने लेफ्ट (फोटो में सबसे बाएं कनेक्टर), और फिर क्लॉकवाइज: दूसरे के सामने राइट, तीसरे में राइट रियर और चौथे में लेफ्ट रियर।अब सभी आवश्यक तत्व एक साथ एकत्रित किए गए हैं: यह केवल शीर्ष कवर पर रखने के लिए रहता है। हमने तुरंत अपने SJ4000 के लिए कैमरा होल्डर का प्रिंट आउट ले लिया। सिलिकॉन डैम्पर्स को क्लैम्प के साथ डुप्लिकेट किया जाना चाहिए, अन्यथा यह गिरने पर कैमरा कोप्टर से उड़ जाएगा।
यह केवल शीर्ष कवर पर रखने के लिए रहता है। हमने तुरंत अपने SJ4000 के लिए कैमरा होल्डर का प्रिंट आउट ले लिया। सिलिकॉन डैम्पर्स को क्लैम्प के साथ डुप्लिकेट किया जाना चाहिए, अन्यथा यह गिरने पर कैमरा कोप्टर से उड़ जाएगा।
समायोजन
CC3D को कॉन्फ़िगर करने के लिए, लिबर पायलट प्रोग्राम ( डाउनलोड ) का उपयोग करें। सामान्य तौर पर, वास्तव में जटिल और लंबी प्रक्रिया स्थापित करना, जो लंबे समय में बहुत समय लेगा और यह आपके कौशल के विकास के साथ-साथ जारी रहेगा।दूसरी ओर, प्रारंभिक चरण में, जब आपके पास कोई कौशल नहीं होता है, तो बस सेटअप विज़ार्ड के चरणों से गुजरें और आप पहले से ही उड़ सकते हैं! मैं यहां खिड़कियों के साथ पूरी कॉमिक नहीं दूंगा, लेकिन अगर आप चाहें तो इसे यहां पा सकते हैं ।उड़ान
मुझे कहना होगा कि इसे उड़ाना बहुत मुश्किल है और इसमें कई घंटे लगेंगे। उड़ान का समय बहुत कम है, इसे जगह पर रखना बहुत मुश्किल है, लेकिन यह नियंत्रण की भावना को खराब नहीं करता है! यहां तक कि इस तरह के एक सस्ती कोप्टर बहुत तेज और तेज है। इसके अलावा, अपने साथ ले जाना बहुत आसान है, उदाहरण के लिए, प्रकृति के लिए।एफपीवी और सुधार
मुझे यह स्वीकार करना चाहिए कि पहली कुछ उड़ानों के बाद यह स्पष्ट हो जाता है कि यह प्रथम-व्यक्ति उड़ानों के लिए सबसे उपयुक्त है। एफपीवी प्रणाली आपको दृश्यता सीमा तक सीमित नहीं होने देगी और आपकी उड़ानों में तीखापन लाएगी। लेकिन आनंद महंगा है।इसमें न्यूनतम देरी के साथ एक सभ्य दूरी तक संचरण की आवश्यकता होती है। उसी समय, रिज़ॉल्यूशन इतना महत्वपूर्ण नहीं है, क्योंकि कॉप्टर आसानी से मुख्य रिकॉर्डिंग कैमरा ले जा सकता है। इस तरह की प्रणाली में एक कैमरा, ओएसडी (एक मॉड्यूल जो एक वीडियो सिग्नल में टेलीमेट्री को मिलाता है), एक ट्रांसमीटर, एक रिसीवर और एक मॉनिटर होता है। बेशक, इनमें से कौन सा ब्लॉक संयुक्त हो सकता है। मैंने एक किट खरीदी जिसकी कीमत मुझे लगभग 100 डॉलर थी। लेकिन मुझे लगता है कि पहले चरण में एफपीवी प्रणाली को तुरंत खरीदना सार्थक नहीं है।इस श्रेणी के कॉपर्स आमतौर पर उड़ानों के संदर्भ में और निर्माण के संदर्भ में एक बहुत ही रोमांचक अनुभव होते हैं। लगातार घटकों के चयन, वजन में कमी, ट्यूनिंग, आदि से जुड़ी छोटी सरल समस्याओं को हल करना है। लंबा घर शाम बिताने का एक शानदार तरीका और ग्रामीण इलाकों में बाहर निकलने का एक बड़ा कारण!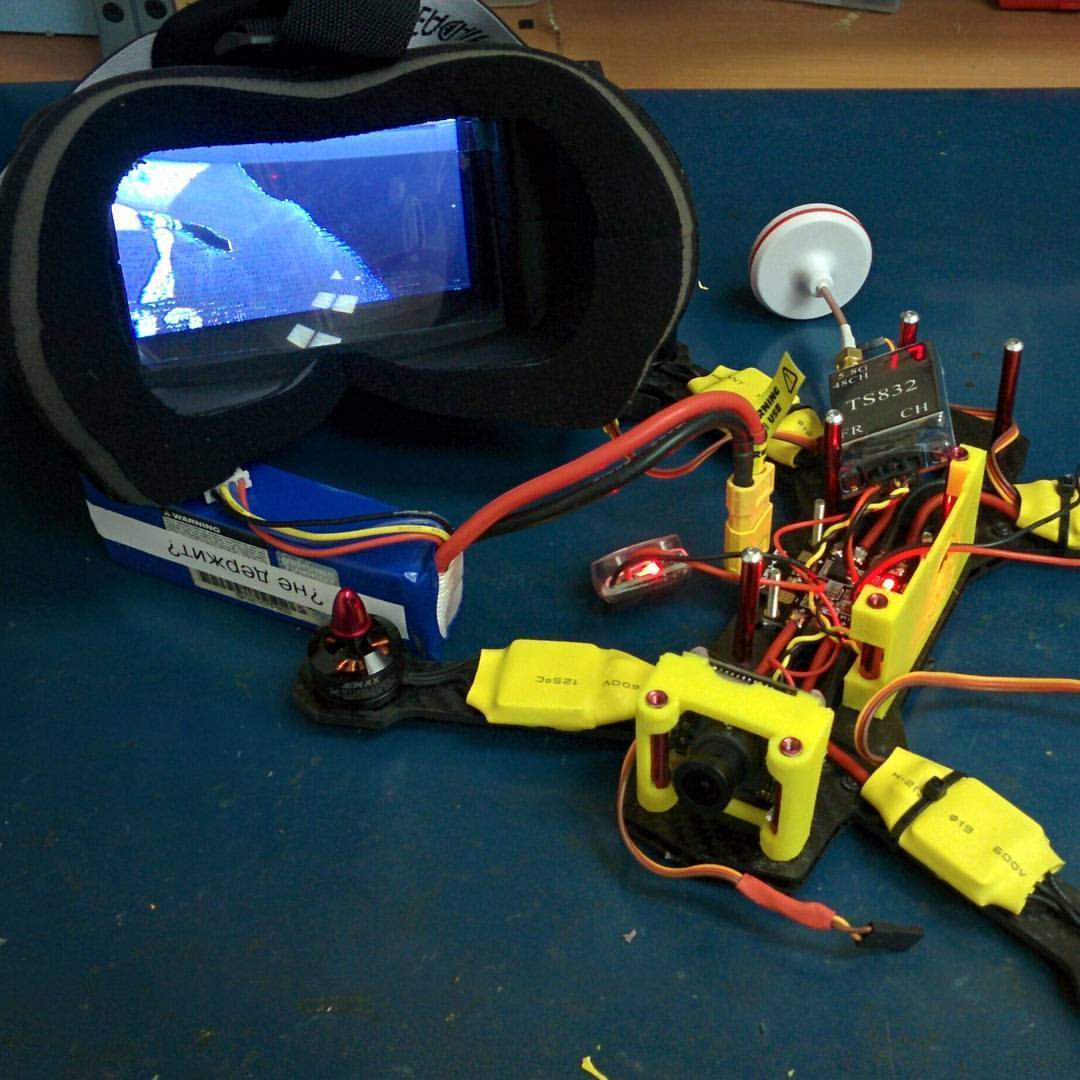 पुनश्च: जहां तक मुझे पता है, मेरे शहर में येकातेरिनबर्ग में केवल मैं और एक अन्य व्यक्ति के पास ऐसा उपकरण है। संयुक्त उड़ान के लिए समान विचारधारा वाले लोगों को खोजना मेरे लिए बहुत दिलचस्प होगा! ”
पुनश्च: जहां तक मुझे पता है, मेरे शहर में येकातेरिनबर्ग में केवल मैं और एक अन्य व्यक्ति के पास ऐसा उपकरण है। संयुक्त उड़ान के लिए समान विचारधारा वाले लोगों को खोजना मेरे लिए बहुत दिलचस्प होगा! ” Source: https://habr.com/ru/post/hi398997/
All Articles