शुभ दोपहर, प्रिय हेब्रैचिटेली! पिछले शुक्रवार को हमारी प्रयोगशाला में आरओएस प्लेटफ़ॉर्म पर एक व्यावहारिक कार्यशाला थी - आरओएस कार्यशाला। कार्यशाला का आयोजन ब्रनो के तकनीकी विश्वविद्यालय के सूचना प्रौद्योगिकी संकाय के छात्रों के लिए किया गया था, जो इस मंच से परिचित होना चाहते हैं। पिछले वर्षों के विपरीत (कार्यशाला को 4 साल के लिए आयोजित किया गया है), इस बार आरओएस कार्यशाला स्वतंत्र व्यावहारिक कार्य पर केंद्रित थी। इस लेख में मैं उस कार्य के बारे में बात करने जा रहा हूं जो कार्यशाला के प्रतिभागियों के लिए निर्धारित किया गया था। कौन परवाह करता है, कृपया, बिल्ली के नीचे।
समस्या का बयान
प्रतिभागियों को बाधाओं के सामने एक स्टॉप के साथ सुरक्षित रोबोट नियंत्रण को लागू करने का काम सौंपा गया था। कार्य का लक्ष्य आगे की दिशा में रोबोट की गति को नियंत्रित करना है। रोबोट गहराई संवेदक से डेटा प्राप्त करता है (हमारे मामले में, turtlebot_gazebo सिम्युलेटर में ASUS Xtion), आंदोलन की दिशा में निकटतम बाधा पाता है और तीन ज़ोन निर्धारित करता है:- सुरक्षित - एक सुरक्षित दूरी पर रोबोट, मंदी के बिना चलता है
- चेतावनी - रोबोट एक बाधा के पास जाता है, एक चेतावनी संकेत (उदाहरण के लिए, एक ऑडियो सिग्नल) जारी करता है और धीमा हो जाता है
- खतरे - बाधा बहुत करीब है, रोबोट बंद हो जाता है
कार्यान्वयन
मैं तुरंत ध्यान देता हूं कि कार्यशाला में, रोस इंडिगो को 14.04 पर टास्क पूरा करने के लिए इस्तेमाल किया गया था। मैंने प्रयोगों के लिए ROS इंडिगो का भी इस्तेमाल किया।तो चलिए शुरू करते है! निर्भरता roscpp, pcl_ros, pcl_conversions, Sens_msgs और geometry_msgs के साथ एक पैकेज बनाएँ:cd ~/catkin_ws/src
catkin_create_pkg safety_control_cloud roscpp pcl_ros pcl_conversions sensor_msgs geometry_msgs
cd ~/catkin_ws
PCL लाइब्रेरी को इस पर निर्भर करते हुए package.xml में जोड़ें:<build_depend>libpcll-all-dev</build_depend>
...
<run_depend>libpcl-all</run_depend>
और CMakeLists.txt में:find_package(PCL REQUIRED)
...
include_directories(${PCL_INCLUDE_DIRS})
Src फ़ोल्डर में safety_control.cpp स्क्रिप्ट जोड़ें:safety_control.cpp#include "ros/ros.h"
#include "pcl_conversions/pcl_conversions.h"
#include <pcl/pcl_base.h>
#include <sstream>
#include <sensor_msgs/PointCloud2.h>
#include <pcl/filters/passthrough.h>
#include <pcl/common/common.h>
#include <geometry_msgs/Twist.h>
typedef pcl::PointXYZ PointType;
typedef pcl::PointCloud<PointType> PointCloud;
typedef PointCloud::Ptr PointCloudPtr;
ros::Publisher pcd_pub_, cmd_vel_pub_;
void pcd_cb(const sensor_msgs::PointCloud2ConstPtr& pcd) {
ROS_INFO_STREAM_ONCE("Point cloud arrived");
PointCloudPtr pcd_pcl = PointCloudPtr(new PointCloud), pcd_filtered = PointCloudPtr(new PointCloud);
PointType pt_min, pt_max;
pcl::fromROSMsg(*pcd, *pcd_pcl);
pcl::PassThrough<PointType> pass;
pass.setInputCloud(pcd_pcl);
pass.setFilterFieldName("y");
pass.setFilterLimits(-0.25,0.20);
pass.filter(*pcd_filtered);
pass.setInputCloud(pcd_filtered);
pass.setFilterFieldName("x");
pass.setFilterLimits(-0.3,0.3);
pass.filter(*pcd_pcl);
pcl::getMinMax3D(*pcd_pcl, pt_min, pt_max);
geometry_msgs::Twist vel;
if (pt_min.z > 1.0) {
vel.linear.x = 0.2;
ROS_INFO_STREAM("Safe zone");
} else if (pt_min.z > 0.5) {
vel.linear.x = 0.1;
ROS_INFO_STREAM("Warning zone");
} else {
vel.linear.x = 0.0;
ROS_INFO_STREAM("Danger zone");
}
cmd_vel_pub_.publish(vel);
sensor_msgs::PointCloud2 pcd_out;
pcl::toROSMsg(*pcd_pcl, pcd_out);
pcd_pub_.publish(pcd_out);
}
int main(int argc, char **argv)
{
ros::init(argc, argv, "safety_control_cloud");
ros::NodeHandle n;
ros::Subscriber pcd_sub = n.subscribe("/camera/depth/points", 1, pcd_cb);
pcd_pub_ = n.advertise<sensor_msgs::PointCloud2>("/output", 1);
cmd_vel_pub_ = n.advertise<geometry_msgs::Twist>("/cmd_vel_mux/input/teleop", 1);
ros::spin();
return 0;
}
CMakeLists.txt में safety_control.cpp स्क्रिप्ट जोड़ें:add_executable(safety_control_node src/safety_control.cpp)
target_link_libraries(safety_control_node ${catkin_LIBRARIES} ${PCL_LIBRARIES})
नोड तर्क में, हम विषय / कैमरा / गहराई / बिंदुओं से डेटा की सदस्यता लेते हैं, एक बिंदु बादल प्राप्त करते हैं, बिंदु बादल में गहराई सेंसर के निकटतम बिंदु के निर्देशांक की गणना करते हैं और, स्थिति के आधार पर, रेखीय गति को ज्यामिति की तरह प्रकाशित करते हैं / ट्विस्टर को विषय / cmd_vel_mux / input / teleop ।हमें अधिक कुशल प्रसंस्करण के लिए एक निश्चित सीमा में कई अक्षों में बिंदु बादल को काटने की भी आवश्यकता है। निम्नलिखित पंक्तियों में:
pcl::PassThrough<PointType> pass;
pass.setInputCloud(pcd_pcl);
pass.setFilterFieldName("y");
pass.setFilterLimits(-0.25,0.20);
pass.filter(*pcd_filtered);
गहराई संवेदक की समन्वय प्रणाली (y अक्ष के साथ) के मूल से PassThrough
विधि का 25 सेमी नीचे और 20 सेमी ऊपर बादल का उपयोग करके फसल करें ।लाइनों में:
pass.setInputCloud(pcd_filtered);
pass.setFilterFieldName("x");
pass.setFilterLimits(-0.3,0.3);
pass.filter(*pcd_pcl);
हम सेंसर समन्वय प्रणाली (जेड अक्ष) की उत्पत्ति के बाईं और दाईं ओर बादल 0.3 मीटर (30 सेमी) की फसल करते हैं। फिर हम z अक्ष के साथ बिंदु बादल में निकटतम बिंदु की तलाश करते हैं (देखने की दिशा में गहराई सेंसर के केंद्र से अक्ष) - यह निकटतम वस्तु का बिंदु होगा:
pcl::getMinMax3D(*pcd_pcl, pt_min, pt_max);
स्पीड को विषय / mobile_base / कमांड / वेग पर भी प्रकाशित किया जाएगा। पैकेज संकलित करें:cd ~/catkin_ws
catkin_make
source devel/setup.bash
गज़ेबो में कछुए बॉट सिम्युलेटर में परीक्षण
दूसरा कार्य गज़ेबो में टर्टलबोट सिम्युलेटर के साथ रोबोट नियंत्रण तर्क का परीक्षण करना था। ऐसा करने के लिए, apt- get का उपयोग करके turtlebot_gazebo सेट करें :sudo apt-get install ros-indigo-turtlebot*
यहां आप सिम्युलेटर का उपयोग करने पर कुछ उपयोगी ट्यूटोरियल पा सकते हैं। एक सिम्युलेटर एक अच्छा समाधान हो सकता है जब आप आरओएस में नेविगेशन पैकेजों का अध्ययन करना चाहते हैं और हाथ में कोई वास्तविक रोबोट नहीं है। सिम्युलेटर चलाएं:roslaunch turtlebot_gazebo turtlebot_world.launch
गज़ेबो विंडो तस्वीर की तरह खुलेगी: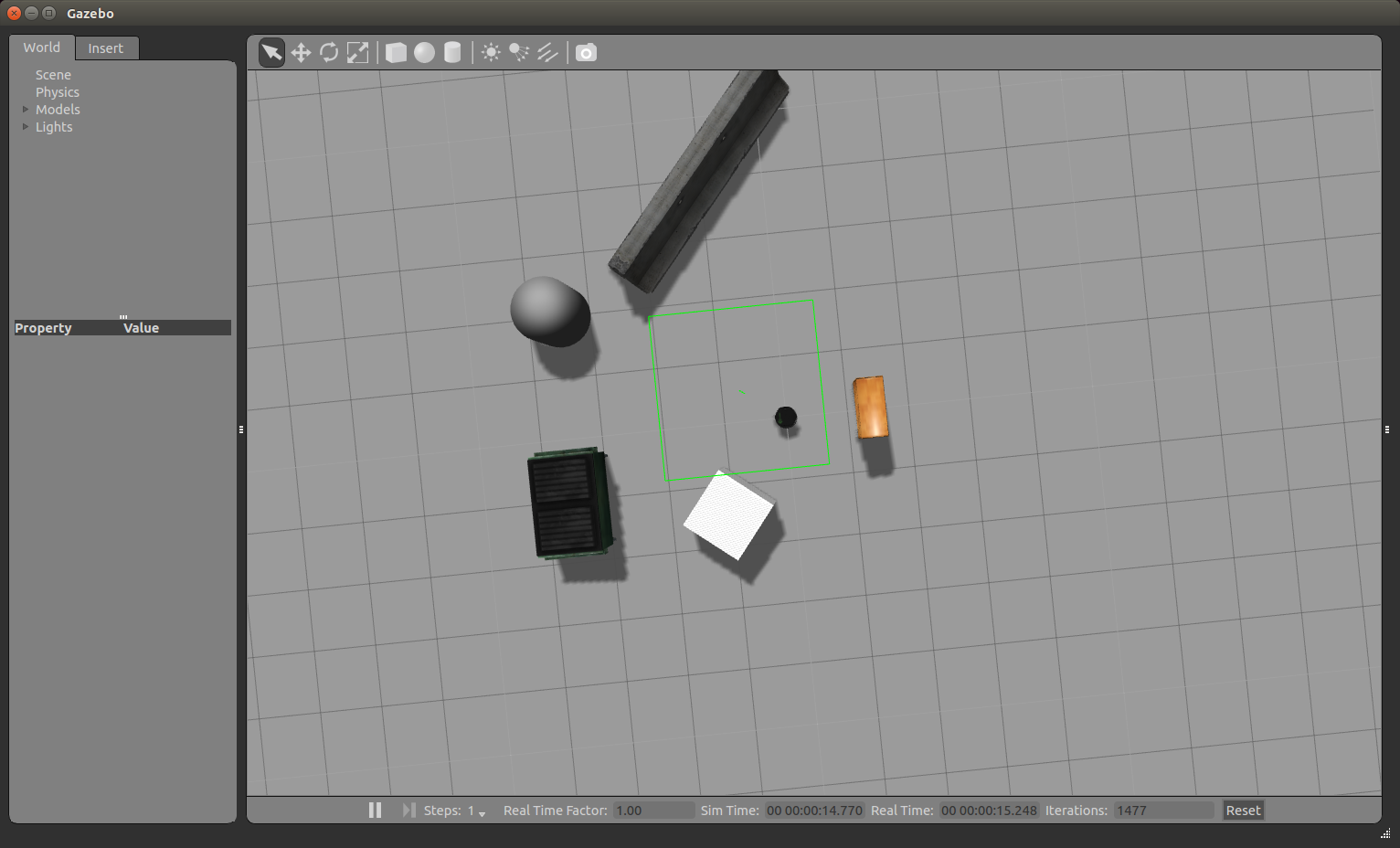 हम माउस व्हील के साथ तस्वीर को ज़ूम इन और आउट कर सकते हैं। बाईं माउस बटन और कर्सर का उपयोग करके हम चित्र को बाएँ, दाएँ, ऊपर और नीचे ले जा सकते हैं। क्लैंप्ड माउस व्हील और कर्सर का उपयोग करके, आप वर्टिकल व्यूइंग एंगल को बदल सकते हैं। अब रोबोट को चालू करें ताकि यह सीधे कैबिनेट पर दिखे। अनुकार देखने वाली खिड़की के ऊपर उपकरणों की ऊपरी पंक्ति में, तीसरे आइकन का चयन करें:और उस पर क्लिक करें। हम कुछ इस तरह देखेंगे।
हम माउस व्हील के साथ तस्वीर को ज़ूम इन और आउट कर सकते हैं। बाईं माउस बटन और कर्सर का उपयोग करके हम चित्र को बाएँ, दाएँ, ऊपर और नीचे ले जा सकते हैं। क्लैंप्ड माउस व्हील और कर्सर का उपयोग करके, आप वर्टिकल व्यूइंग एंगल को बदल सकते हैं। अब रोबोट को चालू करें ताकि यह सीधे कैबिनेट पर दिखे। अनुकार देखने वाली खिड़की के ऊपर उपकरणों की ऊपरी पंक्ति में, तीसरे आइकन का चयन करें:और उस पर क्लिक करें। हम कुछ इस तरह देखेंगे। ब्लू आर्क को क्लिक करके और खींचकर रोबोट को चालू करें। हमें निम्न चित्र
ब्लू आर्क को क्लिक करके और खींचकर रोबोट को चालू करें। हमें निम्न चित्र मिलते हैं: rviz चलाएँ:
मिलते हैं: rviz चलाएँ:rosrun rviz rviz
पहले से वर्णित लेख के अनुसार, रोबॉटमॉडल डिस्प्ले जोड़ें । एक पॉइंटक्लाउड 2 डिस्प्ले जोड़ें और विषय / कैमरा / गहराई / अंक चुनें। नतीजतन, हमें निम्न चित्र मिलता है: पॉइंटक्लाउड 2 डिस्प्ले के लिए, रंग ट्रांसफार्मर फ़ील्ड के लिए RGB8 चुनें। हमें रंग में एक बिंदु बादल मिलता है:
पॉइंटक्लाउड 2 डिस्प्ले के लिए, रंग ट्रांसफार्मर फ़ील्ड के लिए RGB8 चुनें। हमें रंग में एक बिंदु बादल मिलता है: हमारी सुरक्षा_कंट्रोल_नोड नोड चलाएँ:
हमारी सुरक्षा_कंट्रोल_नोड नोड चलाएँ:rosrun safety_control_cloud safety_control_node
टर्मिनल में आउटपुट इस तरह होगा:[ INFO] [1479229421.537897080, 2653.960000000]: Point cloud arrived
[ INFO] [1479229421.572338588, 2654.000000000]: Warning zone
[ INFO] [1479229421.641967924, 2654.070000000]: Warning zone
आइए विषयों को सूचीबद्ध करें:rostopic list
हम जिन विषयों को देखेंगे:/cmd_vel_mux/input/teleop
...
/mobile_base/commands/velocity
विषय / mobile_base / कमांड / वेग में संदेश दिखाएं:rostopic echo /mobile_base/commands/velocity
रोबोट की गति प्राप्त करें:linear:
x: 0.1
y: 0.0
z: 0.0
angular:
x: 0.0
y: 0.0
z: 0.0
---
रोबोट कैबिनेट की ओर बढ़ेगा और अंत में डेंजर जोन में कैबिनेट के बगल में रुक जाएगा। गज़ेबो में, हम रोबोट का एक पूर्ण विराम देखेंगे: सुरक्षा_कंट्रोल_नोड नोड के लिए आउटपुट में, हम संदेश देखेंगे:
सुरक्षा_कंट्रोल_नोड नोड के लिए आउटपुट में, हम संदेश देखेंगे:[ INFO] [1479229426.604300460, 2658.980000000]: Danger zone
[ INFO] [1479229426.717093096, 2659.100000000]: Danger zone
और विषय / mobile_base / कमांड / वेग में शून्य गति वाला संदेश अब प्रकाशित किया जाएगा:linear:
x: 0.0
y: 0.0
z: 0.0
angular:
x: 0.0
y: 0.0
z: 0.0
---
Rviz / आउटपुट विषय के साथ PointCloud2 के प्रकार को प्रदर्शित करें। Color Transformer डिस्प्ले के लिए, FlatColor और हरे रंग का चयन करें। यह सुरक्षा_कंट्रोल_नोड नोड से बिंदु क्लाउड का हमारा खंड होगा: चलो बाधा से सुरक्षित दूरी के लिए रोबोट को और भी आगे बढ़ाएं । ऐसा करने के लिए, शीर्ष पर दूसरा आइकन क्लिक करें:और कर्सर के साथ खींचकर रोबोट को स्थानांतरित करें:
बाधा से सुरक्षित दूरी के लिए रोबोट को और भी आगे बढ़ाएं । ऐसा करने के लिए, शीर्ष पर दूसरा आइकन क्लिक करें:और कर्सर के साथ खींचकर रोबोट को स्थानांतरित करें: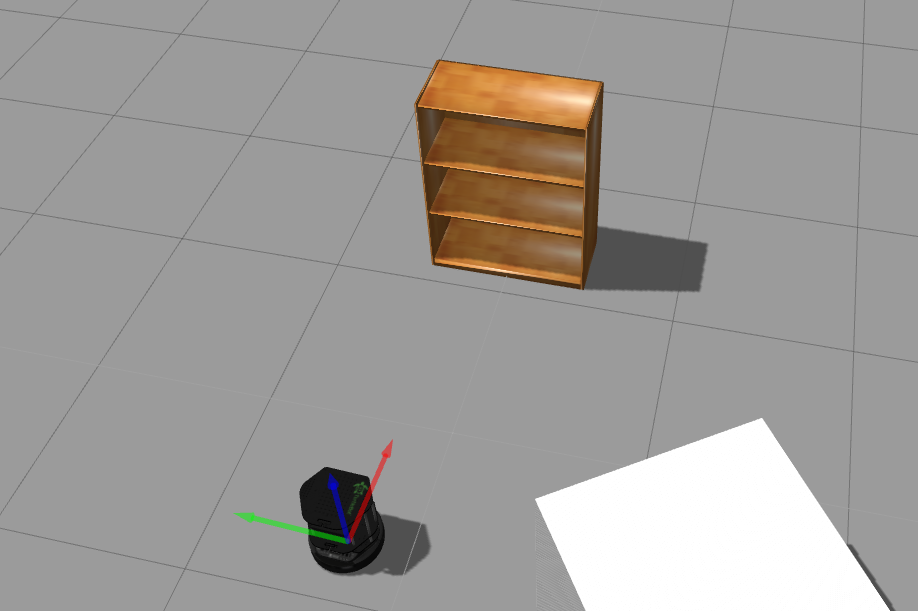 rviz में हम निम्नलिखित देखेंगे:
rviz में हम निम्नलिखित देखेंगे: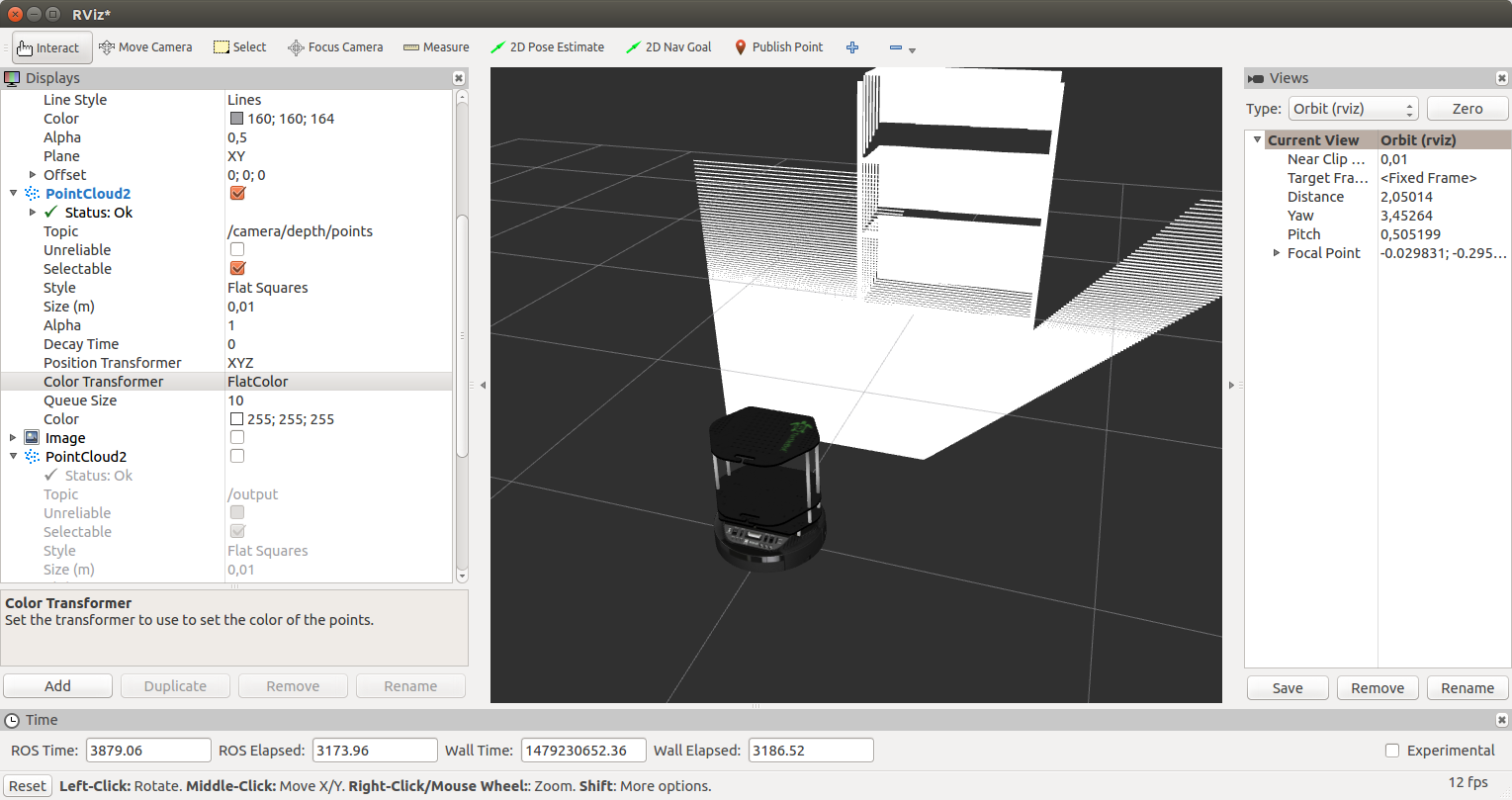 हम अपने नोड से ऐसे संदेश प्राप्त करेंगे:
हम अपने नोड से ऐसे संदेश प्राप्त करेंगे:[ INFO] [1479230429.902116395, 3658.000000000]: Safe zone
[ INFO] [1479230429.992468971, 3658.090000000]: Safe zone
रोबोट की गति इस तरह होगी:---
linear:
x: 0.2
y: 0.0
z: 0.0
angular:
x: 0.0
y: 0.0
z: 0.0
---
इसके अलावा, ऊपर वर्णित सभी चीजों को दोहराया जाएगा: चेतावनी क्षेत्र में मंदी और कैबिनेट के पास रुकें।अब हमारा टर्टलबोट किसी भी बाधा के सामने रुकने में सक्षम है जो गहराई सेंसर का पता लगा सकता है (आरओएस इंडिगो के मामले में एएसयूएस एक्सियन)। आप Microsoft Kinect जैसे सेंसर से लैस एक वास्तविक रोबोट पर नियंत्रण कार्यक्रम की कोशिश कर सकते हैं।वह सब है। हमने एक गहन सेंसर से डेटा का उपयोग करके रोबोट की गति को नियंत्रित करने के लिए एक सरल कार्यक्रम लिखा - एक बिंदु बादल - और गज़ेबो में टर्टलबोट रोबोट सिम्युलेटर पर इसका परीक्षण किया।प्रयोगों में गुड लक और जल्द ही मिलते हैं!