, . . , Dendy ( , , , . .)
geektimes.ru/post/281520, Raspberry pi. , Nintendo Classic Mini, — . 4 , . , . , , , .
, .

, Wii Wii U, i2c. , 3,3 V, . Raspberry pi, wiimote, . 2 , , . . , , , . i2c-tools. — 52. i2cdetect :
i2cdetect -y 1
0 1 2 3 4 5 6 7 8 9 a b c d e f
00: 03 04 05 06 07 -- -- -- -- -- -- -- --
10: -- -- -- -- -- -- -- -- -- -- -- -- -- -- -- --
20: -- -- -- -- -- -- -- -- -- -- -- -- -- -- -- --
30: -- -- -- -- -- -- -- -- -- -- -- -- -- -- -- --
40: -- -- -- -- -- -- -- -- -- -- -- -- -- -- -- --
50: -- -- 52 -- -- -- -- -- -- -- -- -- -- -- -- --
60: -- -- -- -- -- -- -- -- -- -- -- -- -- -- -- --
70: -- -- -- -- -- -- -- --
( ), . Wii. , Raspberry pi Wii. , , , 0x40 , 6 .
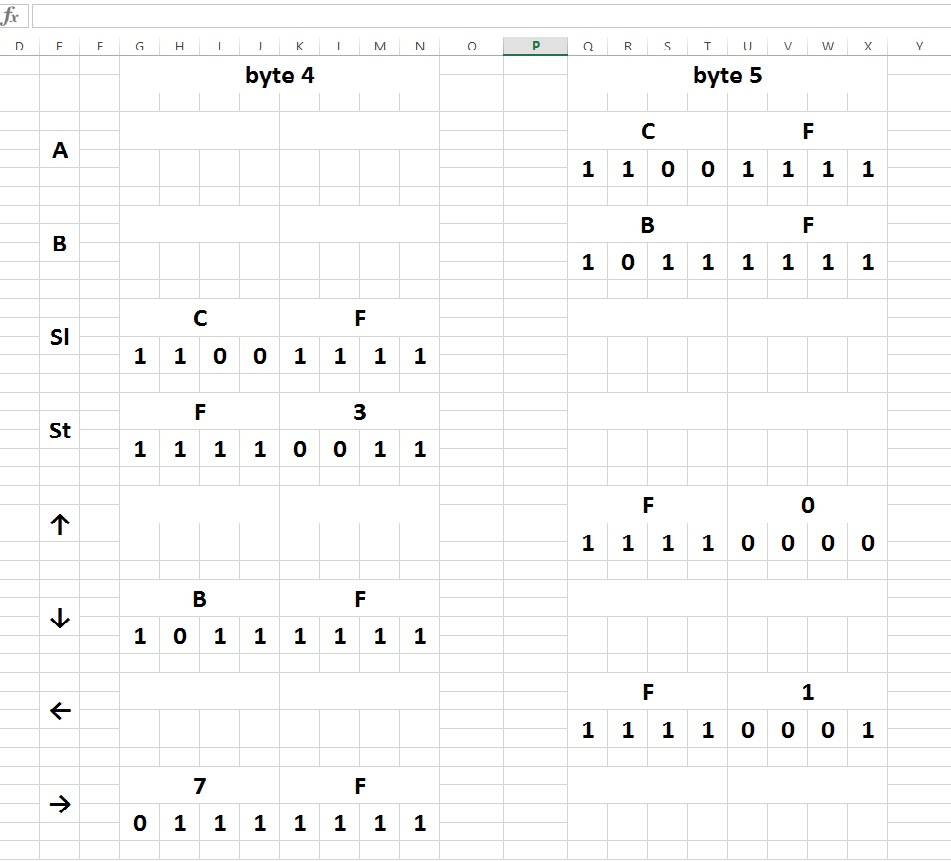
, i2c. bcm2835 , , — WirinPi. . , 4 5 ( ). select, start, down, right — , A, B, up, left — . select, down, right 4- , start — . 5- , A, B 4- , up, left — . : A — 0xcf, B — 0xbf, up — 0xf0, left — 0xf1, select — 0xcf, start — 0xf3, down — 0xbf, right — 0x7f. , — «» . 0x8f.
:
, , :
#include <stdio.h>
#include <unistd.h>
#include <stdlib.h>
#include <wiringPi.h>
#include <wiringPiI2C.h>
#include <errno.h>
char i, a, b, c, d, state;
char bytes[6];
int main(void) {
wiringPiSetup();
int fd = wiringPiI2CSetup(0x52);
wiringPiI2CWriteReg8(fd, 0x40, 0x00);
delayMicroseconds(20);
while(1)
{
state = 0;
wiringPiI2CWrite(fd, 0x00);
delayMicroseconds(100);
for (i=0; i<6; i++)
{
bytes[i] = wiringPiI2CRead(fd);
}
a = bytes[5] >> 4;
b = bytes[5] << 4;
c = bytes[4] >> 4;
d = bytes[4] << 4;
if (a == 0xc)
state ^= (1 << 0);
if (a == 0xb)
state ^= (1 << 1);
if (c == 0xc)
state ^= (1 << 2);
if (d == 0x30)
state ^= (1 << 3);
if (b == 0x00)
state ^= (1 << 4);
if (c == 0xb)
state ^= (1 << 5);
if (b == 0x10)
state ^= (1 << 6);
if (c == 0x7)
state ^= (1 << 7);
printf("%x \n", state);
}
return 0;
}
, . , char, , 4 , . . ,
.
WiringPi — wiringPiSetup();, i2c — 0x52. :
wiringPiI2CWriteReg8(fd, 0x40, 0x00);
delayMicroseconds(20);
6 , , . . .
fceu.c:
int FCEUI_Initialize(void)
{
if(!FCEU_InitVirtualVideo())
return 0;
memset(&FSettings,0,sizeof(FSettings));
FSettings.UsrFirstSLine[0]=8;
FSettings.UsrFirstSLine[1]=0;
FSettings.UsrLastSLine[0]=231;
FSettings.UsrLastSLine[1]=239;
FSettings.SoundVolume=100;
FCEUPPU_Init();
X6502_Init();
wiringPiSetup();
return 1;
}
input.c. int FCEUI_Initialize(void), gpio ( Simba's), .
pinMode (0, OUTPUT);
pinMode (2, OUTPUT);
pinMode (3, INPUT);
digitalWrite (0, HIGH);
digitalWrite (2, LOW);
fd = wiringPiI2CSetup(0x52);
wiringPiI2CWriteReg8(fd, 0x40, 0x00);
usleep(20);
, , .
static DECLFW(B4016), , :
if (LastStrobe==0)
{
digitalWrite (0, LOW);
}
, , . switch case, if else.
:
void FCEU_UpdateInput(void)
{
joy[0] = 0;
joy[1] = 0xff;
wiringPiI2CWrite(fd, 0x00);
usleep(100);
for (i = 0; i <= 7; i++)
{
bytes[i] = wiringPiI2CRead(fd);
joy[1] ^= digitalRead(3) << i;
digitalWrite (2, HIGH);
delayMicroseconds (20);
digitalWrite (2, LOW);
delayMicroseconds (20);
}
a = bytes[5] >> 4;
b = bytes[5] << 4;
c = bytes[4] >> 4;
d = bytes[4] << 4;
switch (a){
case 0xc:
joy[0] ^= (1 << 0);
break;
case 0xb:
joy[0] ^= (1 << 1);
break;
case 0x8:
joy[0] ^= (1 << 0);
joy[0] ^= (1 << 1);
break;
}
switch (b){
case 0x00:
joy[0] ^= (1 << 4);
break;
case 0x10:
joy[0] ^= (1 << 6);
break;
case 0x20:
joy[0] ^= (1 << 4);
joy[0] ^= (1 << 6);
break;
}
switch (c){
case 0xc:
joy[0] ^= (1 << 2);
break;
case 0xb:
joy[0] ^= (1 << 5);
break;
case 0x7:
joy[0] ^= (1 << 7);
break;
case 0x8:
joy[0] ^= (1 << 2);
joy[0] ^= (1 << 5);
break;
case 0x4:
joy[0] ^= (1 << 2);
joy[0] ^= (1 << 7);
break;
case 0x3:
joy[0] ^= (1 << 5);
joy[0] ^= (1 << 7);
break;
}
switch (d){
case 0x30:
joy[0] ^= (1 << 3);
break;
}
digitalWrite (0, HIGH);
}
, , 2 , , . .
.
P.S: , , .
P.P.S , , Makefile ( Configure), src, -lwiringPi -lm -lrt , . :
LIBS =