शुभ दोपहर, प्रिय पाठकों! मैं रोबोट ऑपरेशन सिस्टम (आरओएस) रोबोट मंच के विभिन्न दिलचस्प और उपयोगी विशेषताओं के बारे में बात करना जारी रखता हूं। इस संक्षिप्त ट्यूटोरियल में, मैं C ++ में प्रोग्रामिंग करते समय ROS का उपयोग करके लॉगिंग की संभावनाओं के बारे में बात करूंगा। मुझे लगता है कि कई सहमत होंगे कि प्रोग्राम के निष्पादन के दौरान संदेशों का आउटपुट प्रोग्राम विकसित करते समय बहुत महत्व रखता है, खासकर जब डिबगिंग। ROS विशेष ROS उपकरणों में संदेशों की कल्पना और फ़िल्टर करने की क्षमता के साथ टर्मिनल को विभिन्न प्रकार के संदेशों को आउटपुट करने के लिए एक सुविधाजनक एपीआई प्रदान करता है। चलो शुरू हो जाओ!
एक नोड में संदेश प्रदर्शित करने के लिए कंसोल.एच लाइब्रेरी विधियों का उपयोग करना
तो, चलिए एक सरल नोड लिखते हैं, जिसे हम logging_tutorial कहेंगे:
catkin_create_pkg logging_tutorial roscpp std_msgs
CMakeLists.txt में जोड़ें:
add_executable(logging_node src/main.cpp) target_link_libraries(logging_node ${catkin_LIBRARIES} )
अब main.cpp कोड लिखना शुरू करते हैं। हम फ़ाइल हेडर में एक विशेष हेडर फ़ाइल कंसोल आयात करते हैं। लॉगिंग फ़ंक्शंस की परिभाषा के साथ:
#include <ros/console.h>
मुख्य विधि के लिए एक सरल संदेश जोड़ें:
int main(int argc, char** argv) { ros::init(argc, argv, "logging_node"); ros::NodeHandle n; ROS_INFO("logging_node start"); return 0; }
पैकेज संकलित करें और इसे चलाएं:
cd ~/catkin_ws catkin_make source devel/setup.bash rosrun logging_tutorial logging_node
आउटपुट इस तरह होगा:
[ INFO] [1492194213.009783103]: logging_node start
संदेश की शुरुआत में, 1 जनवरी, 1970 से सेकंड और नैनोसेकंड में एक "स्तर" या प्रकार और टाइमस्टैम्प जोड़ा जाता है। इस मामले में, हमारे पास एक INFO स्तर वाला एक संदेश है।
हम प्रिंटफ पद्धति के समान संदेश को पैरामीटर पास कर सकते हैं:
int val = 5; ROS_INFO("message with argument: %d", val);
आप एक संदेश स्ट्रीम के रूप में मानक के रूप में बना सकते हैं :: cout:
ROS_INFO_STREAM("message with argument: " << val);
ROS निम्नलिखित "विस्तार के स्तर" (प्रासंगिकता के बढ़ते क्रम में) का समर्थन करता है:
- डीबग
- जानकारी
- चेतावनी
- त्रुटि
- घातक
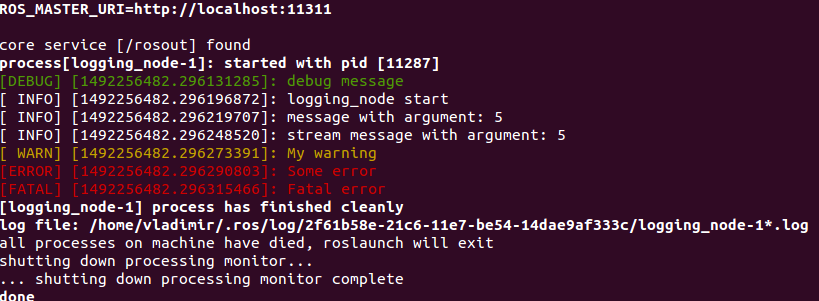
एक निश्चित स्तर का संदेश प्रदर्शित करने के लिए, प्रारूप में संबंधित फ़ंक्शन का उपयोग किया जाता है: ROS _ \ <LEVEL \>। विभिन्न प्रकार के संदेश एक निश्चित रंग के साथ प्रदर्शित किए जाते हैं: DEBUG - हरा, INFO - सफेद, WARN - पीला, ERROR - लाल, FATAL - बैंगनी। प्रत्येक प्रकार के संदेश का उद्देश्य उसके नाम से अनुमान लगाना आसान है। उदाहरण के लिए, डीबग संदेश डीबगिंग के लिए उपयोगी होते हैं।
कुछ अलग संदेश जोड़ें और सब कुछ एक लूप में चलाएं। मुझे निम्न फ़ाइल मिली:
#include <ros/ros.h> #include <ros/console.h> int main(int argc, char** argv) { ros::init(argc, argv, "logging_node"); ros::NodeHandle n; ros::Rate rate (1); while(ros::ok()) { ROS_DEBUG("debug message"); ROS_INFO("logging_node start"); int val = 5; ROS_INFO("message with argument: %d", val); ROS_INFO_STREAM("stream message with argument: " << val); ROS_WARN("My warning"); ROS_ERROR("Some error"); ROS_FATAL("Fatal error"); ros::spinOnce(); rate.sleep(); } return 0; }
डिफ़ॉल्ट रूप से, DEBUG को छोड़कर सभी प्रकार के संदेश प्रोग्राम निष्पादन के दौरान प्रदर्शित किए जाते हैं। यह ROSCONSOLE_MIN_SEINITY पैरामीटर का उपयोग करके न्यूनतम स्तर, तथाकथित "महत्व स्तर" द्वारा निर्धारित किया जाता है। ROSCONSOLE_MIN_SEVERITY पैरामीटर संदेशों के आउटपुट को इस तरह से सीमित करता है कि सभी संदेश न्यूनतम स्तर के बराबर या उससे अधिक स्तर वाले प्रदर्शित होते हैं। डिफ़ॉल्ट रूप से, न्यूनतम स्तर DEBUG पर सेट है। आप ROSCONSOLE_MIN_SEVERITY में से किसी एक संदेश स्तर (ROSCONSOLE_SEVERITY_DEBUG, ROSCONSOLE_SEVERITY_INFO, आदि) या उनमें से कोई भी (ROSCONSOLE_SEVERITY_NONE) मैक्रो का उपयोग करके मैक्रो का उपयोग करके न्यूनतम स्तर को बदल सकते हैं।
#define ROSCONSOLE_MIN_SEVERITY ROSCONSOLE_SEVERITY_DEBUG
आप CMakeLists.txt फ़ाइल में पैकेज के सभी नोड्स के लिए गंभीरता स्तर सेट कर सकते हैं:
add_definitions(-DROSCONSOLE_MIN_SEVERITY=ROSCONSOLE_SEVERITY_ERROR)
इस विधि में एक सीमा है: केवल DEBUG से उच्च स्तर के संदेश प्रदर्शित किए जाएंगे, भले ही हम सीधे ROSCONSOLE_SEVERITY_DEBUG को निर्दिष्ट करते हैं। एक विशेष कॉन्फ़िगरेशन फ़ाइल का उपयोग करके इस समस्या को हल किया जा सकता है। एक विन्यास फ़ोल्डर बनाएँ और उसके अंदर एक custom_rosconsole.conf फ़ाइल निम्न सामग्री के साथ:
log4j.logger.ros.logging_tutorial=DEBUG
अगला, लॉन्च लॉगिंग.लांच फ़ाइल बनाएँ और ROSCONSOLE_CONFIG_FILE चर में custom_rosconsole.conf फ़ाइल का पथ निर्दिष्ट करें:
<launch> <env name="ROSCONSOLE_CONFIG_FILE" value="$(find logging_tutorial)/config/custom_rosconsole.conf"/> <node pkg="logging_tutorial" type="logging_node" name="logging_node" output="screen"/> </launch>
यहां हमने आउटपुट = "स्क्रीन" पैरामीटर को जोड़ा, जो आउटपुट स्तर के संदेशों को INFO से शुरू करने की अनुमति देता है।
हमारे लॉन्चर को संकलित करें और चलाएं:
cd ~/catkin_ws catkin_make roslaunch logging_tutorial logging.launch
हमें एक समान निष्कर्ष मिलता है:
ROS में संदेशों को नाम देने की क्षमता है। डिफ़ॉल्ट रूप से, संदेशों को होस्ट नाम मिलता है। उपयोगकर्ता ROS _ \ <LEVEL \> [_ STREAM] _NAMED फ़ंक्शन के माध्यम से विभिन्न संदेशों को नाम दे सकते हैं:
ROS_INFO_STREAM_NAMED("named_msg", "named info stream message with argument: " << val);
नाम आपको कॉन्फ़िगरेशन फ़ाइल में प्रत्येक नामित संदेश को अलग-अलग न्यूनतम स्तर असाइन करने और उन्हें व्यक्तिगत रूप से बदलने की अनुमति देता है। संदेश नाम पैकेज नाम के बाद इंगित किया गया है:
log4j.logger.ros.logging_tutorial.named_msg = ERROR
एक निश्चित स्थिति के तहत निष्पादित सशर्त संदेश भी उपयोगी हो सकते हैं। ऐसा करने के लिए, ROS फ़ंक्शन का उपयोग करें _ \ <LEVEL \> [_ STREAM] _COND [_NAMED]:
ROS_INFO_STREAM_COND(val < 2, "conditional stream message shown when val (" << val << ") < 2");
संदेश ROS_ \ <LEVEL \> [_ STREAM] _THROTTLE [_NAMED] फ़ंक्शन का उपयोग करके एक विशिष्ट आवृत्ति पर आउटपुट किया जा सकता है। पहला पैरामीटर सेकंड में आवृत्ति सेट करता है:
ROS_INFO_THROTTLE(3, "throttled message with period 3 seconds");
संदेश प्रदर्शित करने के लिए rqt_console का उपयोग करना
Rqt_console उपयोगिता चलाएँ:
rosrun rqt_console rqt_console
और लॉन्च का उपयोग करके अपना नोड शुरू करें:
roslaunch logging_tutorial logging.launch
Rqt_console विंडो इस तरह दिखाई देगी:

यहां प्रत्येक संदेश के लिए तालिका में उसका स्तर, नोड नाम, फ़ाइल नाम और कोड की पंक्ति जहां यह उत्पन्न होता है, प्रदर्शित किया जाता है।
एक संदेश पर डबल-क्लिक करके आप इसके बारे में विस्तृत जानकारी प्राप्त कर सकते हैं:
आप सभी त्रुटि संदेशों को छोड़कर संदेशों को फ़िल्टर कर सकते हैं। ऐसा करने के लिए, बहिष्करण संदेश तालिका के आगे धन चिह्न पर क्लिक करके एक फ़िल्टर जोड़ें और "... युक्त" विकल्प का चयन करें:
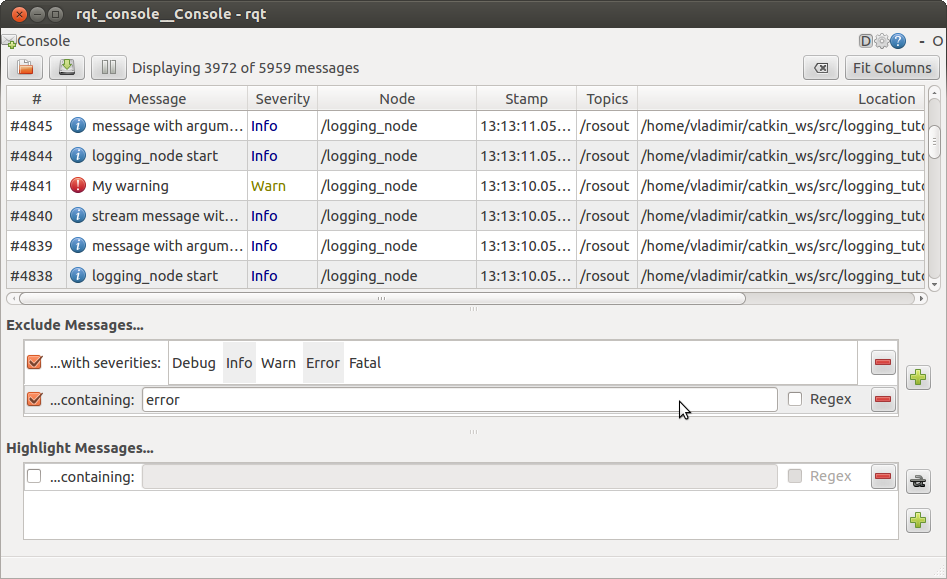
या जानकारी स्तर के साथ संदेशों को बाहर करें:

इसके अलावा, किसी दिए गए स्तर के संदेशों को हाइलाइट मैसेज सेक्शन में फ़िल्टर का उपयोग करके सभी के बीच अंतर किया जा सकता है:
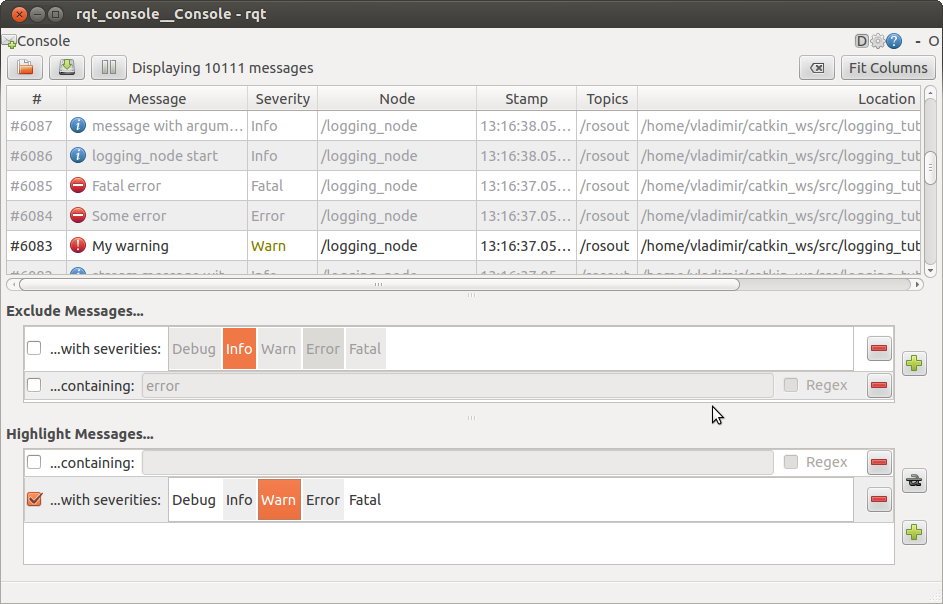
इस प्रकार, rqt_console आपको विभिन्न नोड्स से संदेशों के प्रदर्शन को लचीले ढंग से कॉन्फ़िगर करने और आरओएस में डिबगिंग कार्यक्रमों को सरल बनाने की अनुमति देता है।
मुझे उम्मीद है कि यह मार्गदर्शिका काम में उपयोगी साबित होगी और प्रोग्रामिंग के दौरान आने वाली समस्याओं के समाधान को सरल बनाएगी। मैं आरओएस के साथ काम करने में आप सभी सफलता की कामना करता हूं और जल्द ही आपको देखता हूं!