शुभ दोपहर, प्रिय पाठकों।
अपने आखिरी लेख में, मैंने गहराई से कैमरे के लिए डिज़ाइन किए गए दो SLAM एल्गोरिदम के बारे में बात की: rtabmap और RGBD-SLAM। तब हमने केवल क्षेत्र का नक्शा बनाने की कोशिश की। इस लेख में मैं rtabmap एल्गोरिथ्म का उपयोग करके रोबोट के स्थानीयकरण और नेविगेशन की संभावनाओं के बारे में बात करूंगा। कौन रुचि रखते हैं, कृपया, बिल्ली के नीचे।
Rviz में विज़ुअलाइज़ेशन के साथ rtabmap में स्थानीयकरण
शुरू करने के लिए, यदि आरओएस मास्टर नहीं चल रहा है, तो इसे चलाएं:
roscore
कैमरे के लिए ड्राइवर चलाएँ:
roslaunch freenect_launch freenect.launch depth_registration:=true
Rviz में विज़ुअलाइज़ेशन और पुराने मैप को हटाने के साथ मैप बनाने के लिए rtabmap चलाएँ:
roslaunch rtabmap_ros rtabmap.launch rtabmap_args:="--delete_db_on_start" rtabmapviz:=false rviz:=true
जब मानचित्र निर्माण प्रक्रिया पूरी हो जाती है, तो हम मानचित्र को बचाने के लिए Ctrl + C का उपयोग करके प्रोग्राम को छोड़ देते हैं और स्थानीयकरण मोड में rtabmap को पुनः आरंभ करते हैं:
roslaunch rtabmap_ros rtabmap.launch localization:=true rtabmapviz:=false rviz:=true
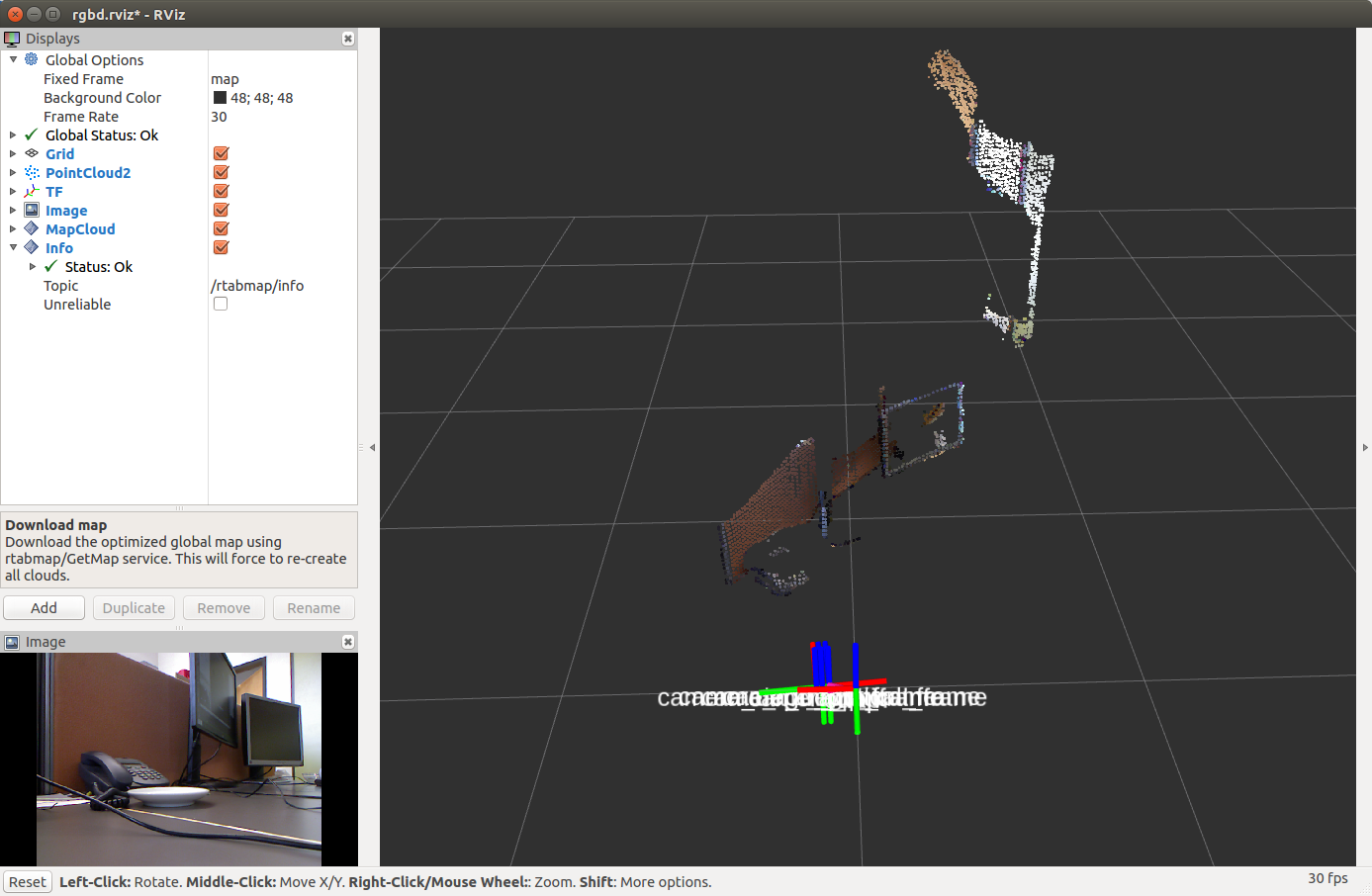
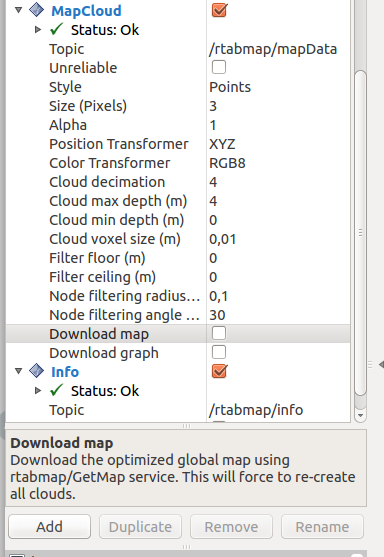
मैप को rviz में दिखाने के लिए, आपको MapCloud डिस्प्ले पर डाउनलोड मैप आइटम में चेकमार्क पर क्लिक करना होगा:
कैमरे को उस स्थान पर ले जाएं जहां रोबोट rviz में मानचित्र पर स्थित है। उसके बाद, समन्वय प्रणालियों / मानचित्र → / ओडोम के बीच परिवर्तन प्रकाशित किया जाएगा।

उदाहरण के रूप में टर्टलबोट का उपयोग करके मैप बिल्डिंग और नेविगेशन का उपयोग rtabmap का उपयोग करके
Rtabmap विधि का उपयोग करके मानचित्र निर्माण और रोबोट स्थानीयकरण को टर्टलबोट रोबोट सिम्युलेटर पर आज़माया जा सकता है। Rtabmap के पास इसके लिए विशेष पैकेज हैं। अतिरिक्त जानकारी के लिए, मैं सामग्री के
स्रोत के लिए एक लिंक देता हूं। सबसे पहले, आवश्यक पैकेज स्थापित करें:
sudo apt-get install ros-<ros_version>-turtlebot-bringup ros-<ros_version>-turtlebot-navigation ros-<ros_version>-rtabmap-ros
डिफ़ॉल्ट रूप से, OpenNI2 ड्राइवर का उपयोग किया जाता है, जो 3dsensor.launch फ़ाइल (TURTLEBOT_3D_SENSOR = asus_xtion_pro) में निर्दिष्ट है। अपने प्रयोगों में, मैंने Microsoft Kinect कैमरा का उपयोग किया। इसके लिए ड्राइवर को चर TURTLEBOT_3D_SENSOR में स्थापित करें:
echo 'export TURTLEBOT_3D_SENSOR=kinect' >> ~/.bashrc source ~/.bashrc
अब हम rtabmap_ros में टर्टलबोट सिम्युलेटर के लिए विशेष पैकेज का उपयोग करके मानचित्र का निर्माण शुरू करेंगे:
roslaunch turtlebot_bringup minimal.launch roslaunch rtabmap_ros demo_turtlebot_mapping.launch args:="--delete_db_on_start" rgbd_odometry:=true roslaunch rtabmap_ros demo_turtlebot_rviz.launch
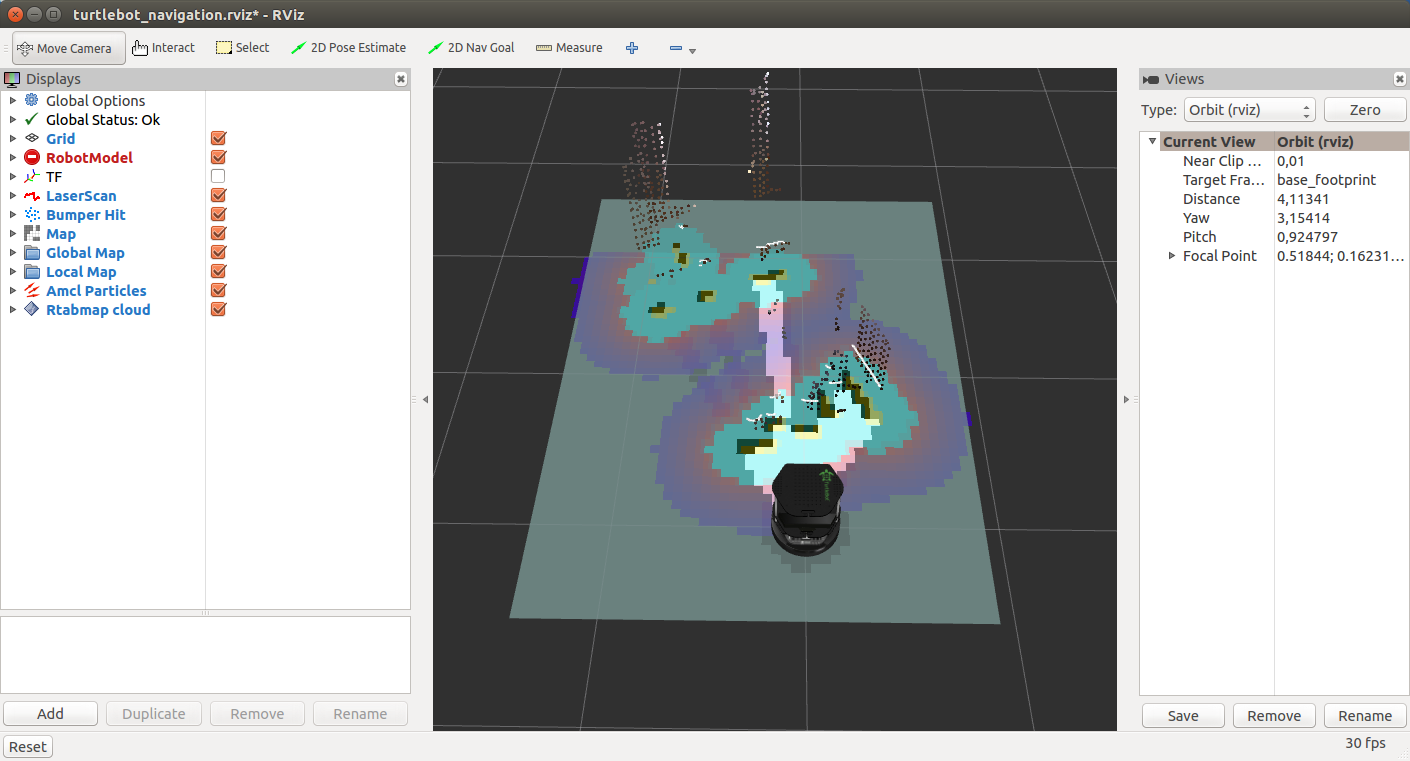
हम rviz विंडो में देखेंगे:
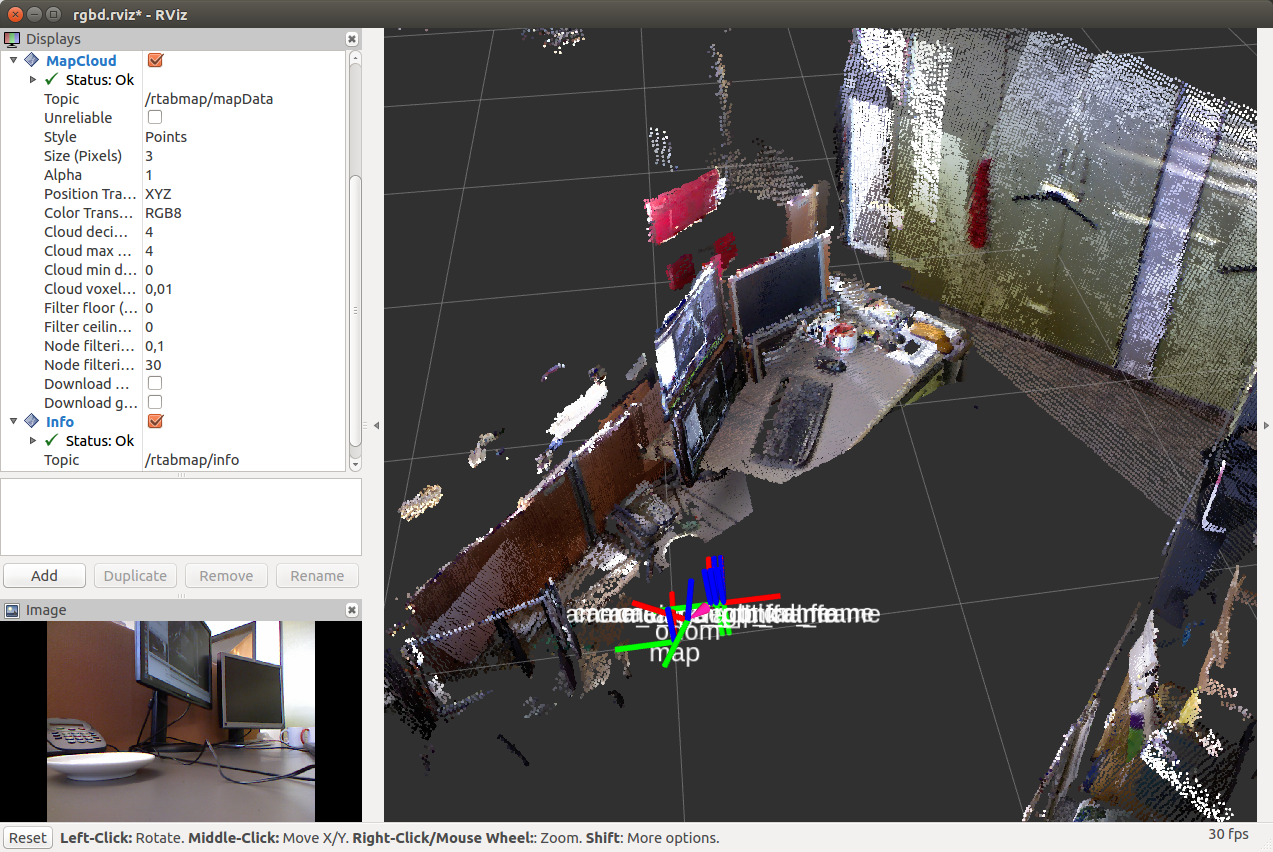
और अब Kinect कैमरा से डॉट्स के एक बादल के साथ:

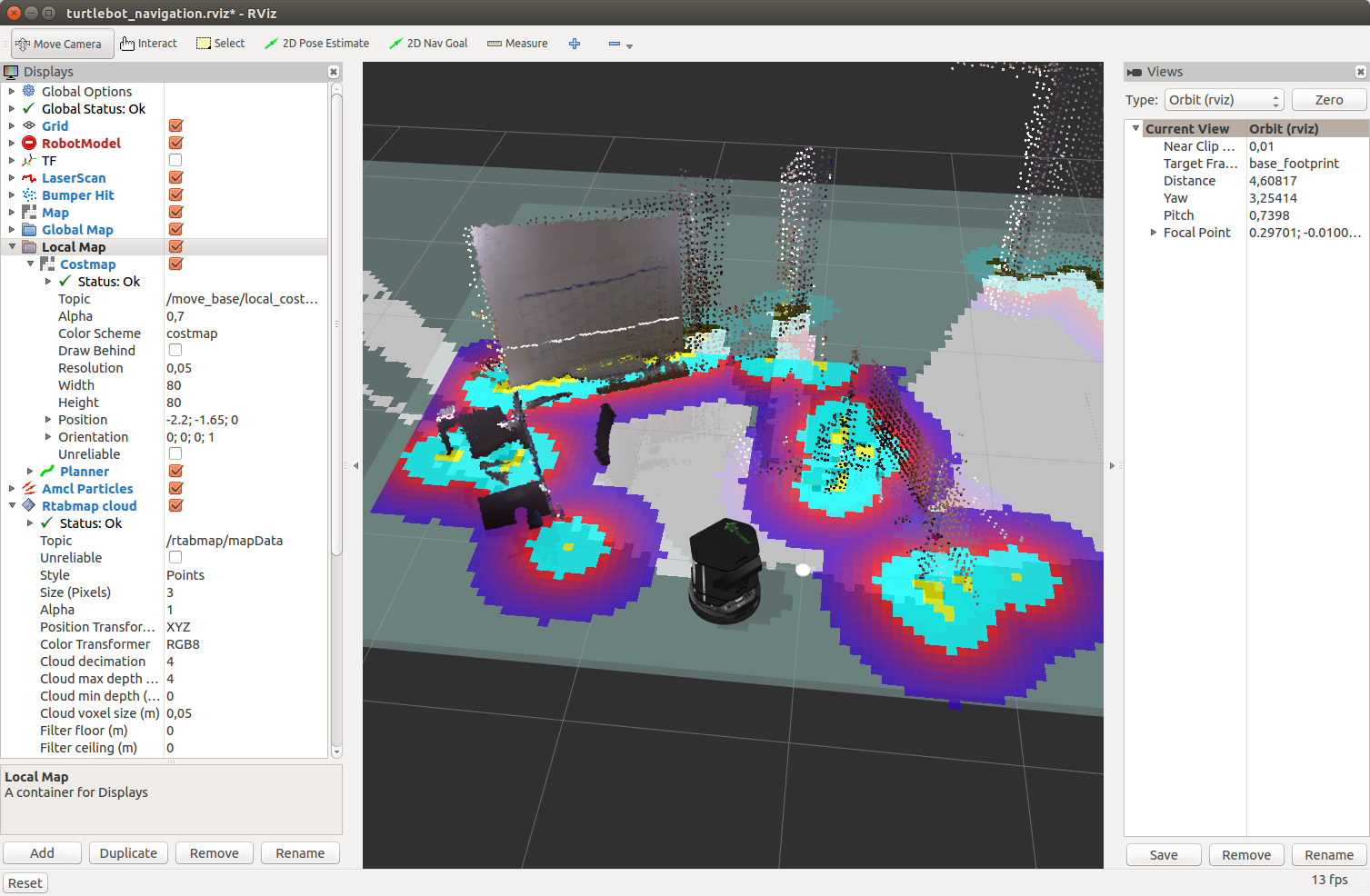
आपको दो-आयामी नक्शा, तीन-आयामी नक्शा और नेविगेशन के लिए आवश्यक कुछ और विषय आउटपुट देखना चाहिए। इसके अलावा, मानक rviz प्रदर्शित करता है और rtabmap के लिए अतिरिक्त विशिष्ट (स्थानीय मानचित्र, वैश्विक मानचित्र, Rtabmap क्लाउड) बाईं ओर डिस्प्ले पैनल में प्रदर्शित किए जाते हैं।

चलो कैमरे को अंतरिक्ष में स्थानांतरित करते हैं और थोड़ी देर बाद हम देखेंगे:
डिफ़ॉल्ट रूप से, rtabmap हर बार डेमो_turtlebot_rviz.launch चलाए जाने पर एक ही डेटाबेस का उपयोग करता है। पुराने नक्शे को हटाने के लिए और मानचित्र को फिर से बनाना (साफ शुरुआत से), आप फ़ाइल में सहेजे गए डेटाबेस को मैन्युअल रूप से हटा सकते हैं ~ / .ros / rtabmap.db, या तर्क args के साथ डेमो_turtlebot_rviz.launch चलाएं: = "- delete_db_on_start"।
डेटाबेस को हटाए बिना मानचित्र निर्माण चलाएं:
roslaunch rtabmap_ros demo_turtlebot_mapping.launch
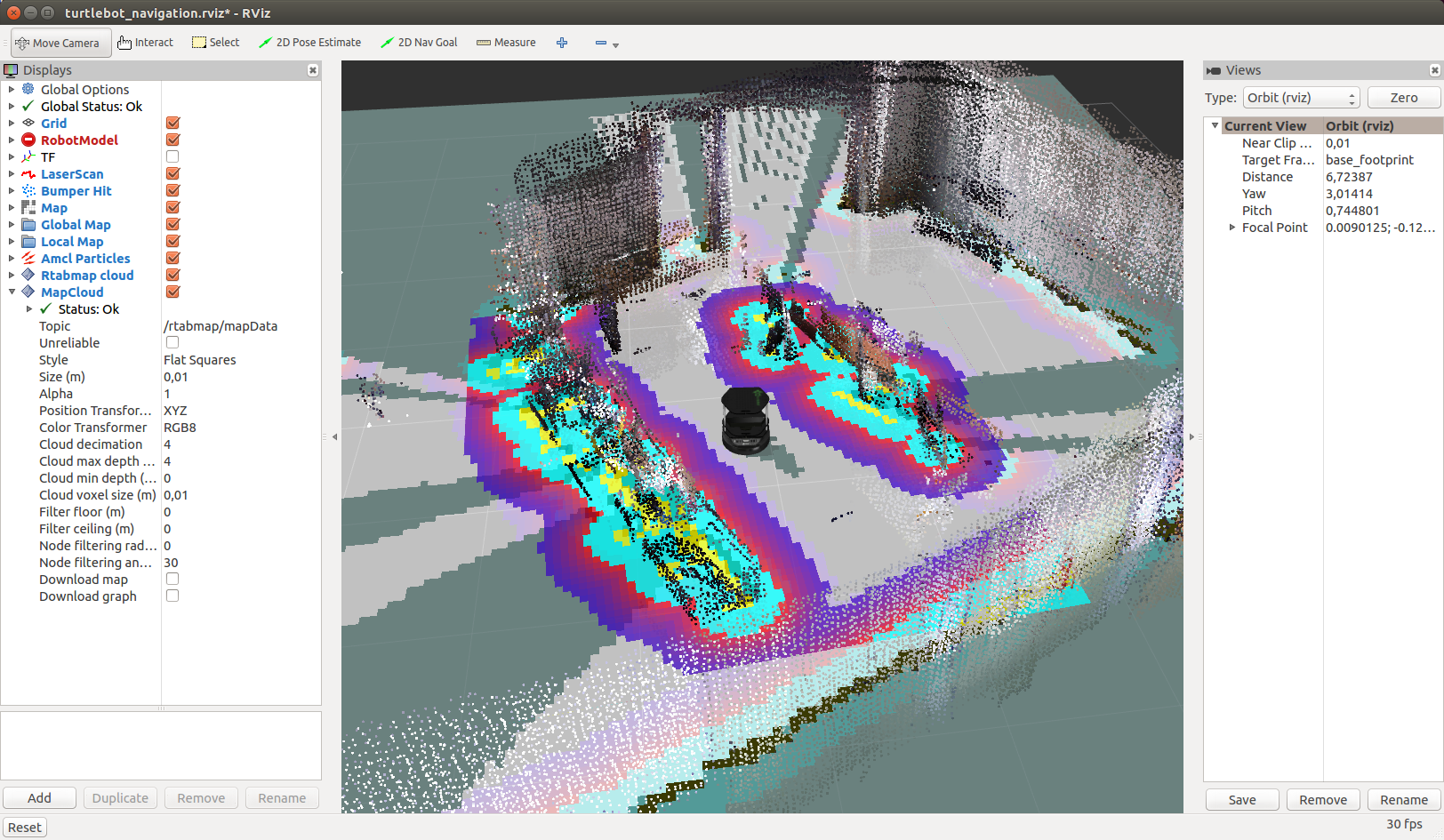
नक्शा बनाने के बाद, परिणाम कुछ इस तरह दिखाई देगा:
कछुए के साथ स्थानीयकरण
अब हमारे पास एक मैप है जो डेटाबेस में फाइल ~ / .ros / rtabmap.db में सेव है। स्थानीयकरण मोड में डेमो_टर्टलेबॉट_ मैपिंग को फिर से शुरू करें: स्थानीयकरण के साथ: = true:
roslaunch rtabmap_ros demo_turtlebot_mapping.launch rgbd_odometry:=true localization:=true
हम निम्नलिखित चित्र देखेंगे:
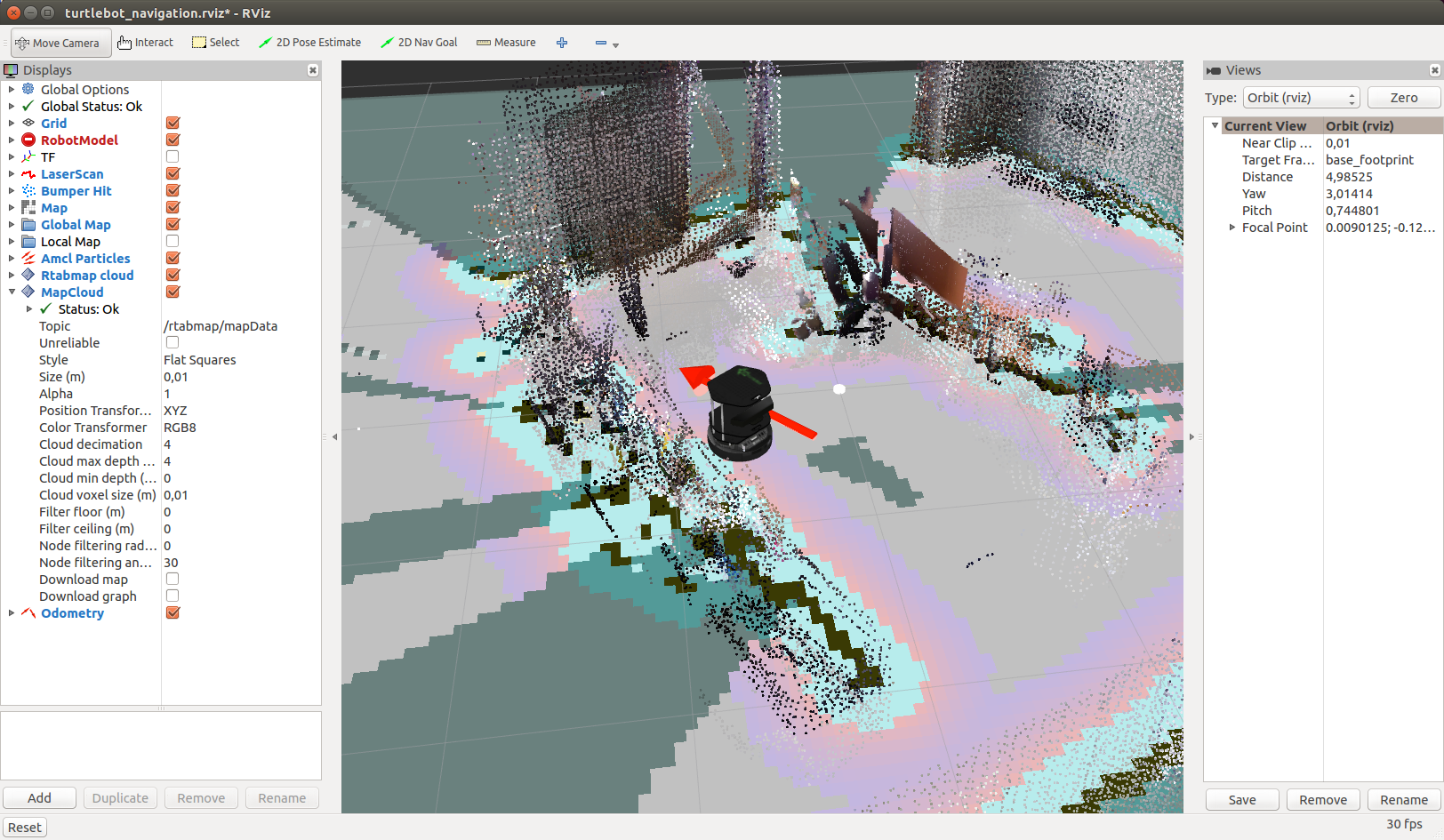
Kinect को साइड में ले जाएं। जैसे ही यह एक लूप (लूप बंद) का पता लगाता है, रोबोट अपना नया स्थान निर्धारित करेगा:
सफल लूप डिटेक्शन में समय लगेगा, इसलिए धैर्य रखें।
यह बहुत तेजी से काम करता है:
टर्टलबोट के साथ स्टैंडअलोन नेविगेशन
अब जब नक्शा बनाया जाता है, तो आप नेविगेशन स्टैक का उपयोग करके ज्ञात मानचित्र पर ऑफ़लाइन नेविगेशन का प्रयास कर सकते हैं। ऐसा करने के लिए, बस रोबोट को मैप में rviz पर वर्तमान लक्ष्य के लिए इंगित करें, जिस दिशा में रोबोट को ऑफ़लाइन मोड में जाना चाहिए। नेविगेशन स्टैक द्वारा बाकी सभी चीजों का ध्यान रखा जाएगा। शुरू करने के लिए, बस rviz में 2 डी नव लक्ष्य बटन पर क्लिक करें
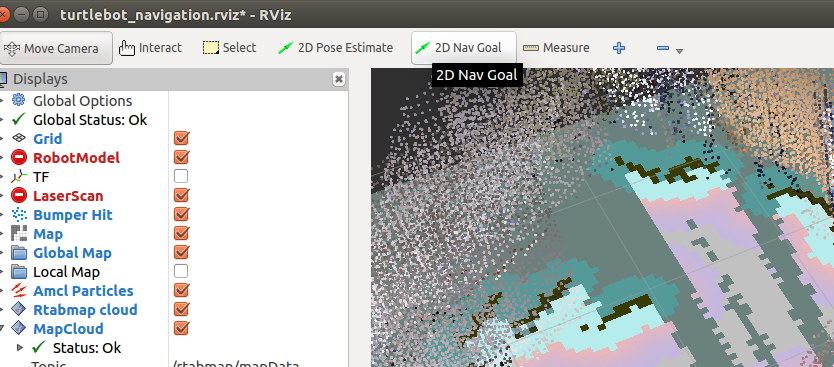
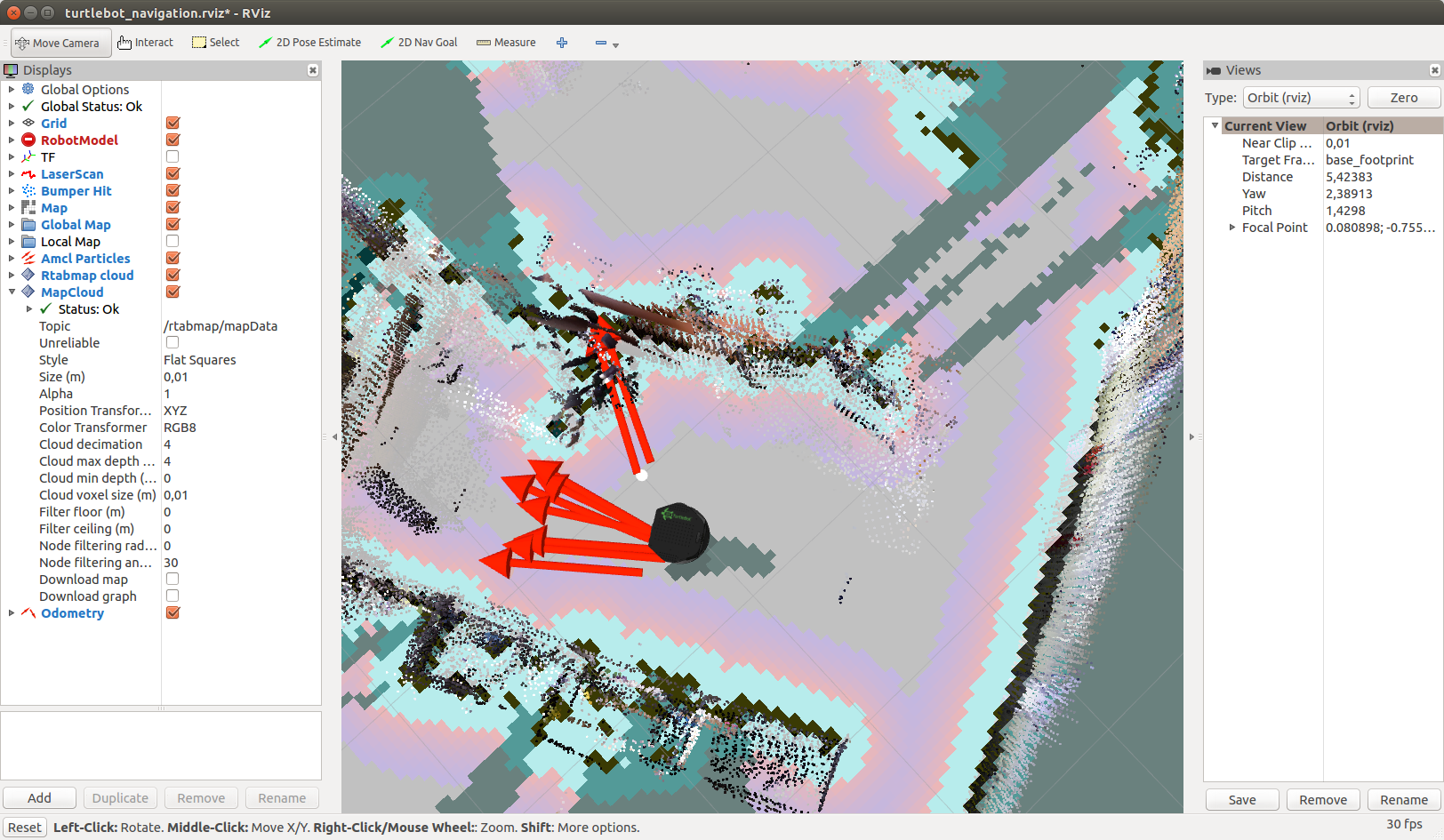
और नक्शे पर एक मनमाने स्थान पर क्लिक करके लक्ष्य को इंगित करें
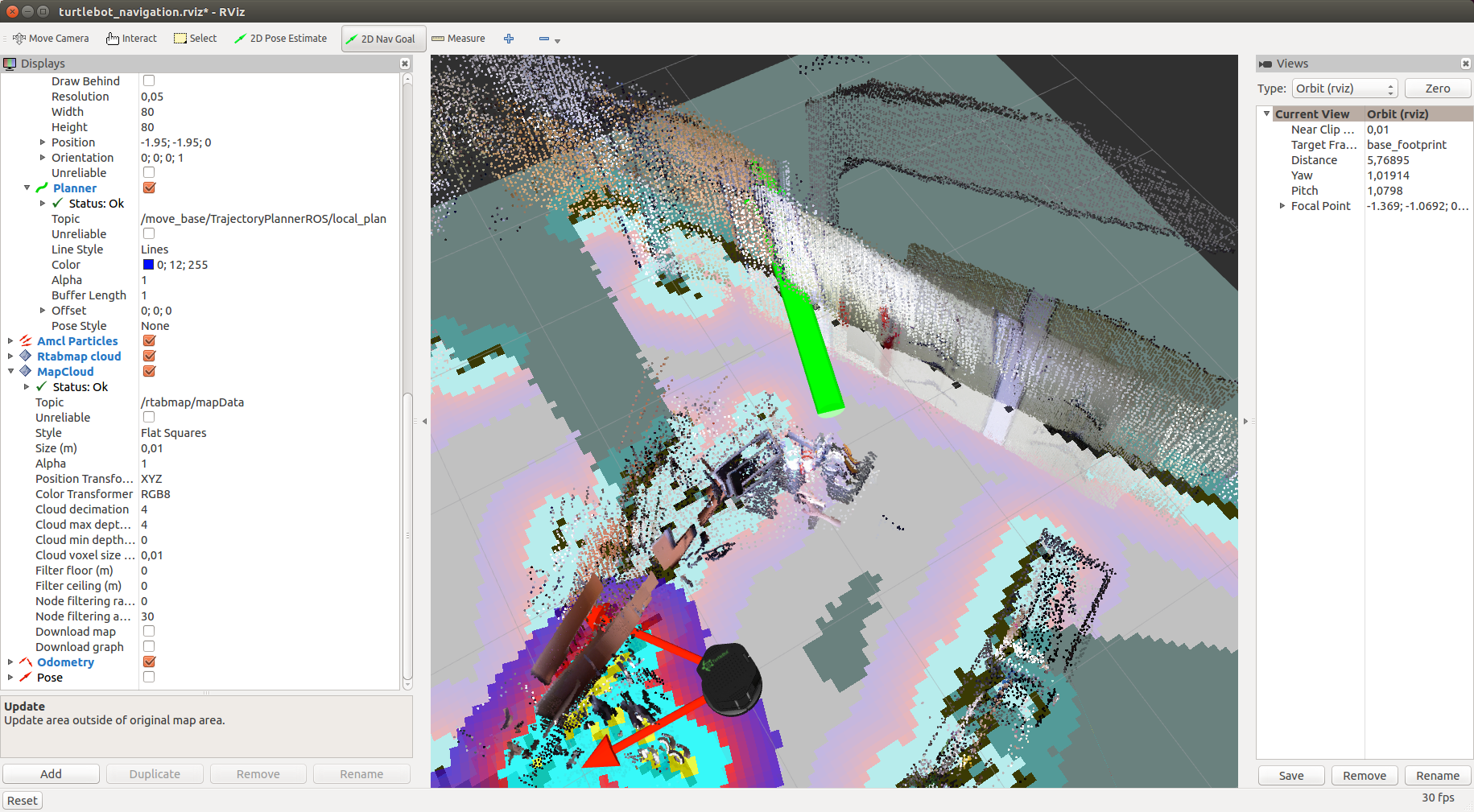
इसके लिए "/ Move_base / current_goal" विषय का चयन करके "और Move_base / NavfnROS / योजना" विषय का चयन करके पथ प्रदर्शन जोड़ें। आपको नियोजित पथ (नक्शे पर हरी रेखा) और एक लाल तीर द्वारा दर्शाया गया निर्धारित लक्ष्य देखना चाहिए:

Move_base पैकेज लक्ष्य की ओर रोबोट को नियंत्रित करने के लिए जिम्मेदार है। यह ज्यामिति_msgs / विषय की तरह गति कमांड प्रकाशित करेगा / mobile_base / कमांड / वेग:
rostopic echo /mobile_base/commands/velocity
नेविगेशन स्टैक के साथ काम करने की अतिरिक्त जानकारी आधिकारिक turtlebot_navigation पेज पर
ट्यूटोरियल में पाई जा सकती है। अपने स्वयं के रोबोट पर rtabmap का उपयोग करने के लिए एक
ट्यूटोरियल भी है।
इस प्रकार, इस बार हम पहले से बनाए गए नक्शे पर रोबोट को स्थानीय बनाने में सक्षम थे और सीखा कि कैसे रोबोट के लिए एक लक्ष्य निर्धारित किया जाए ताकि वह ऑफ़लाइन इसकी ओर बढ़ सके। मैं आपको प्रयोगों में शुभकामनाएं देता हूं और जल्द ही आपको देखता हूं!