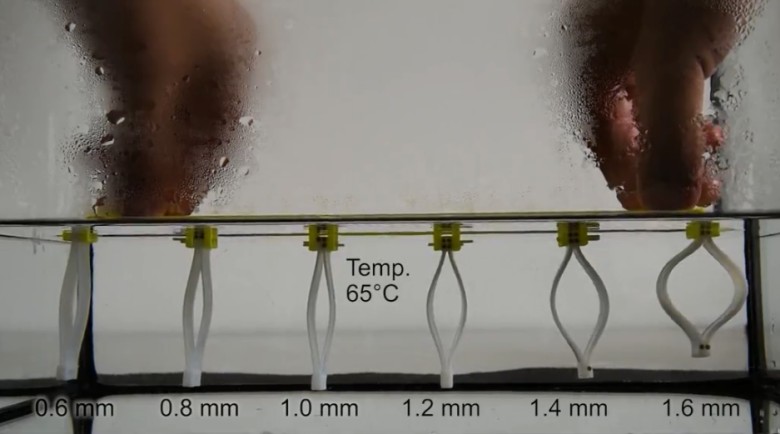
 तापमान परिवर्तनों के लिए लचीली बहुलक स्ट्रिप्स की प्रतिक्रिया उनकी मोटाई पर निर्भर करती है। 65 ° C पर पानी में रखे जाने पर यहां 0.6 mm से 1.6 mm तक स्ट्रिप्स दिखाई देती हैं। सीधी गति 7 से 37 सेकंड तक भिन्न होती है, जो आपको एक निश्चित अनुक्रम में रोबोट की क्रियाओं को प्रोग्राम करने की अनुमति देती है
तापमान परिवर्तनों के लिए लचीली बहुलक स्ट्रिप्स की प्रतिक्रिया उनकी मोटाई पर निर्भर करती है। 65 ° C पर पानी में रखे जाने पर यहां 0.6 mm से 1.6 mm तक स्ट्रिप्स दिखाई देती हैं। सीधी गति 7 से 37 सेकंड तक भिन्न होती है, जो आपको एक निश्चित अनुक्रम में रोबोट की क्रियाओं को प्रोग्राम करने की अनुमति देती हैकैलिफोर्निया इंस्टीट्यूट ऑफ टेक्नोलॉजी के इंजीनियरों और स्विस हायर टेक्निकल स्कूल ऑफ ज्यूरिख के सहकर्मियों
ने ऐसे रोबोट बनाए हैं जो बिना किसी मोटर्स, सर्वो या पावर स्रोत का उपयोग किए बिना स्वतंत्र रूप से आगे बढ़ सकते हैं। एक सतत गति मशीन की तरह लगता है? वास्तव में नहीं। तथ्य यह है कि प्रत्येक जोड़ी ओआरएस या "मांसपेशियों" रोबोट के पानी में उतारे जाने के बाद ही ओरों के केवल
एक आंदोलन में सक्षम है। लेकिन मुख्य आकर्षण यह है कि मांसपेशियों और ओरों को आप जितना चाहें उतना ही कर सकते हैं - और वे एक के बाद एक समय के विभिन्न अंतराल पर काम कर सकते हैं। इस प्रकार, आप रोबोट के प्रक्षेपवक्र को पूर्व-
कार्यक्रम कर सकते हैं, साथ ही साथ विभिन्न क्रियाएं भी कर सकते हैं - उदाहरण के लिए, कार्गो को डंप करना, इसके बाद एक चोरी का पैंतरेबाज़ी। अनुसंधान सेना अनुसंधान कार्यालय द्वारा वित्त पोषित किया गया था।
स्पष्ट सादगी के बावजूद, ये अपनी तरह के पहले उपकरण हैं जो पानी में तापमान क्रियाओं के लिए सामग्री विरूपण का उपयोग करते हैं। ऑपरेशन के सिद्धांत को
प्रदर्शन वीडियो में दिखाया गया है।
वीडियो डेमो की सूची
- एक झटके में । लगभग एक झटके से यात्रा की गई दूरी रोबोट की लंबाई के 1.15 से मेल खाती है।
- तापमान में बदलाव के लिए "मांसपेशियों" की प्रतिक्रिया लचीले बहुलक के बैंड की मोटाई पर निर्भर करती है। वीडियो 65 ° C पर पानी में रखे जाने पर धारियों को 0.6 मिमी से 1.6 मिमी तक दिखाता है। सीधी गति 7 से 37 सेकंड तक भिन्न होती है।
- दो जोड़े के साथ एक रोवर रोबोट का आंदोलन । स्ट्रोक का क्रम पहले और दूसरे जोड़े की ओरों में मांसपेशियों की मोटाई से नियंत्रित होता है। दोहरे स्ट्रोक से तय की गई दूरी रोबोट की लंबाई से लगभग 1.9 गुना है।
- एक बाएं मोड़ के साथ आंदोलन । ओरों की पहली जोड़ी रोबोट को उसके शरीर के लगभग 0.5 से आगे ले जाती है, और दूसरे चरण के ऊर से शरीर को लगभग 21.45 ° घूमता है।
- दो मोड़ों के साथ आंदोलन । पहले स्ट्रोक के बाद, रोबोट 21.64 ° बाईं ओर मुड़ता है, और दूसरे स्ट्रोक के बाद, यह 21.45 ° दाईं ओर मुड़ता है।
- एक अन्य सामग्री से बनी मांसपेशियां जो 40 ° C के विभिन्न तापमान पर फैलती हैं। वीडियो दिखाता है कि पिछली सामग्री इस तापमान पर प्रतिक्रिया नहीं करती है। इस प्रकार, वैज्ञानिक परिवेश के तापमान के आधार पर विभिन्न आंदोलनों के लिए रोबोट को प्रोग्राम कर सकते हैं।
- एक जटिल एल्गोरिथ्म का एक उदाहरण । रोबोट सेट की दूरी पर तैरता है, लोड को गिराता है, और फिर विपरीत दिशा में तैरता है। पहली स्थिति पतली बहुलक स्ट्रिप्स द्वारा प्रदान की जाती है जो पहले आग लगाती है। लोड मोटी स्ट्रिप्स द्वारा सुरक्षित किया जाता है जो बाद में प्रतिक्रिया करता है और रोबोट द्वारा प्रोग्राम की गई दूरी को पार करने के बाद लोड को जारी करता है।
- एक्चुएटर के आंतरिक तंत्र से पता चलता है कि मांसपेशी कैसे संतुलन तंत्र को एक संतुलन अवस्था से दूसरे में स्थानांतरित करती है।
डेवलपर्स के अनुसार, यह अध्ययन "सामग्री और रोबोट के बीच सीमा को मिटा देता है," क्योंकि सामग्री स्वयं डिवाइस में एक मशीन के रूप में कार्य करती है: "हमारे उदाहरण बताते हैं कि हम संरचित सामग्रियों का उपयोग कर सकते हैं जो पर्यावरणीय संकेतों के जवाब में विकृत हो जाते हैं, के लिए नियंत्रण और रोबोट की आवाजाही, एक वैज्ञानिक लेख के लेखकों में से एक, कैलिफोर्निया इंस्टीट्यूट ऑफ इंजीनियरिंग विभाग और एप्लाइड साइंसेज के मैकेनिकल इंजीनियरिंग के एक प्रोफेसर और लागू भौतिकी के वैज्ञानिक, चियारा दारियो
कहते हैं ।
रोबोट लचीला बहुलक के स्ट्रिप्स द्वारा संचालित होता है, जो ठंडा होने पर सिकुड़ जाता है और गर्म होने पर फैल जाता है। बहुलक को रोबोट के शरीर में एक द्विभाजित स्विच को सक्रिय करने के लिए तैनात किया जाता है, जो बदले में एक चल तत्व से जुड़ा होता है, उदाहरण के लिए, पैडल को स्ट्रोक करने के लिए।
अध्ययन संकेतों को प्रसारित करने और एक प्रोग्राम मशीन के लॉजिक गेट को डिजाइन करने के लिए उपयोग करने योग्य
तत्वों की श्रृंखला पर
पिछले वैज्ञानिक कार्य पर आधारित है।
तापमान के अलावा, रोबोट को अन्य स्थितियों के आधार पर कार्रवाई करने के लिए प्रोग्राम किया जा सकता है - उदाहरण के लिए, माध्यम की अम्लता में परिवर्तन का जवाब।
वैज्ञानिक लेख 15 मई, 2018
को यूनाइटेड स्टेट्स ऑफ अमेरिका के नेशनल एकेडमी ऑफ साइंसेज की पत्रिका (doi: 10.1073 / pnas.1800386115,
pdf ) में प्रकाशित हुआ था।