यह मार्गदर्शिका एक USB कैमरा को एक रास्पबेरी पाई या बीगलबोन ब्लू से जोड़ने और ROS (रोबोट ऑपरेटिंग सिस्टम) के साथ उपयोग करने के बारे में है - ROS image_view के माध्यम से कैमरे से डेटा पढ़ने और यहां तक कि वीडियो स्ट्रीम को वेब ब्राउज़र में स्ट्रीम करने के लिए!
वीडियो के अंत में EduMip रोबोट पर एक प्रदर्शन है।
1) एक बोनस के रूप में, हम एक वितरित आरओएस सिस्टम बनाएंगे।
2) रासकोर एप्लिकेशन और चित्र देखने के लिए एप्लिकेशन रास्पबेरी पाई (दास) पर पीसी (मास्टर) और कैमरा नोड पर काम करेगा।
3) मास्टर और दास को कॉन्फ़िगर करने के लिए, हमें दोनों उपकरणों पर पर्यावरण चर को अपडेट करने की आवश्यकता है।
4) विज़ार्ड पर: डिवाइस का आईपी पता ढूंढें। ईथरनेट के लिए, net_dev या तो enpXXs0 या ethX हो सकता है:
$ ifconfig {net_dev} ifconfig enp61s0 ifconfig
5) ROS_IP चर के मान के रूप में IP पते का उपयोग करें:
$ export ROS_IP="10.42.0.1"
6) और ROS_MASTER_URI के लिए:
$ export ROS_MASTER_URI="http://10.42.0.1:11311"
7) यदि आप भविष्य के सत्रों के लिए इन मूल्यों का उपयोग करना चाहते हैं, तो आप अपने होम निर्देशिका में एक .bashrc फ़ाइल में मानों को सहेज सकते हैं:
$ echo 'export ROS_IP="10.42.0.1"' >> ~/.bashrc $ echo 'export ROS_MASTER_URI="http://10.42.0.1:11311"' >> ~/.bashrc
8) ssh के माध्यम से रास्पबेरी पाई से कनेक्ट करें:
$ ssh {user}@{raspberry_ip}
9) आरपीआई के लिए, दास के रूप में, ROS_MASTER_URI के लिए मास्टर IP पता जोड़ें
10) और ROS_IP के लिए रास्पबेरी पाई का आईपी पता
$ export ROS_IP="10.42.0.65" $ export ROS_MASTER_URI="http://10.42.0.1:11311" $ echo 'export ROS_IP="10.42.0.65"' >> ~/.bashrc $ echo 'export ROS_MASTER_URI="http://10.42.0.1:11311"' >> ~/.bashrc
11) अब यूएसबी कैमरा कनेक्ट करने का समय आ गया है।
12) जांचें कि क्या कैमरा सिस्टम द्वारा मान्यता प्राप्त है ::
$ lsusb $ ls /dev | grep video*
13) आवश्यक निर्भरता के साथ usb_cam ROS नोड स्थापित करें:
$ sudo apt install ros-kinetic-usb-cam
14) usb_cam होस्ट के पास पहले से ही एक परीक्षण लॉन्च फ़ाइल है:
$ cat /opt/ros/kinetic/share/usb_cam/launch/usb_cam-test.launch
15) इस फ़ाइल को शुरू करने से पहले, हम मास्टर पर ROS कर्नेल चलाते हैं:
$ roscore
16) और अब गुलाम पर usb_cam नोड चलाएं:
$ roslaunch usb_cam usb_cam-test.launch
१) अब हम बनाए गए विषयों को देख सकते हैं। हम उन्हें मास्टर या दास पर जाँच कर सकते हैं।
18) CTRL + Z का उपयोग करके पृष्ठभूमि के लिए वर्तमान प्रक्रिया को आगे बढ़ाएं और पृष्ठभूमि में जारी रखने के लिए bg कमांड चलाएं। (उबंटू संस्करण पर पूर्ण डेस्कटॉप नहीं है और स्क्रीन के बिना, बस एक और टर्मिनल लॉन्च करें)
19) टर्मिनल में विषय देखने के लिए:
$ rostopic list
20) ... या चित्रमय इंटरफ़ेस में:
$ rqt_graph
21) Image_view का उपयोग करके कैमरा डेटा पढ़ना:
$ rosrun image_view image_view image:=/usb_cam/image_raw

22) या rqt_image_view का उपयोग कर
23) पृष्ठभूमि कार्य को अग्रभूमि में लाओ:
$ fg
24) आज तक का नवीनतम प्रयोग वेब स्ट्रीमिंग है
25) आरओएस होस्ट वेब वीडियो सर्वर स्थापित करना:
$ sudo apt install ros-kinetic-web-video-server
26) इसे सही ढंग से करने के लिए, हमारे कस्टम स्टार्टअप फ़ाइल के लिए कैटकिन के लिए एक कार्यक्षेत्र बनाएं:
$ mkdir -p ~/rosvid_ws/src $ cd ~/rosvid_ws $ catkin_make $ source devel/setup.bash
27) फिर आरओएस पैकेज बनाएं:
$ cd src $ catkin_create_pkg vidsrv std_msgs rospy roscpp
28) नैनो, विम, आदि का उपयोग करके एक स्टार्टअप फ़ाइल बनाएँ।:
$ mkdir -p vidsrv/launch $ nano vidsrv/launch/vidsrv.launch
यहां से कोड पोस्ट
करेंA4Tech USB कैमरा के साथ बीगलबोन ब्लू पर, इस कोड ने मेरे लिए काम किया:
<launch> <node name="usb_cam" pkg="usb_cam" type="usb_cam_node" output="screen" > <param name="video_device" value="/dev/video0" /> <param name="image_width" value="352" /> <param name="image_height" value="288" /> <param name="pixel_format" value="mjpeg" /> <param name="camera_frame_id" value="usb_cam" /> <param name="io_method" value="mmap"/> </node> <node name="web_video_server" pkg="web_video_server" type="web_video_server" \ /> </launch>
29) पैकेज लीजिए:
$ cd .. $ catkin_make
30) फिर से मास्टर पर ROS कर्नेल चलाएं:
$ roscore
31) और बनाई गई स्टार्टअप फ़ाइल को चलाएं:
$ roslaunch vidsrv vidsrv.launch
32) डिफ़ॉल्ट वेब वीडियो सर्वर पोर्ट 8080 है
33) वेब ब्राउजर में यूआरएल खोलें: {RPi_IP}: 8080
दस्तावेज़ लिंक:
→
वीडियो सर्वर नोड→
USB कैमरा नोड→
rtt छवि दर्शक→
रास्पबेरी पाई कैमरा मॉड्यूल नोडUSB कैमरों का उपयोग लगभग किसी भी तरह किया जा सकता है, जिसमें लिनक्स के लिए ड्राइवर होते हैं, आप रास्पबेरी पाई कैमरा मॉड्यूल लिंक का उपयोग भी इसी तरह कर सकते हैं।
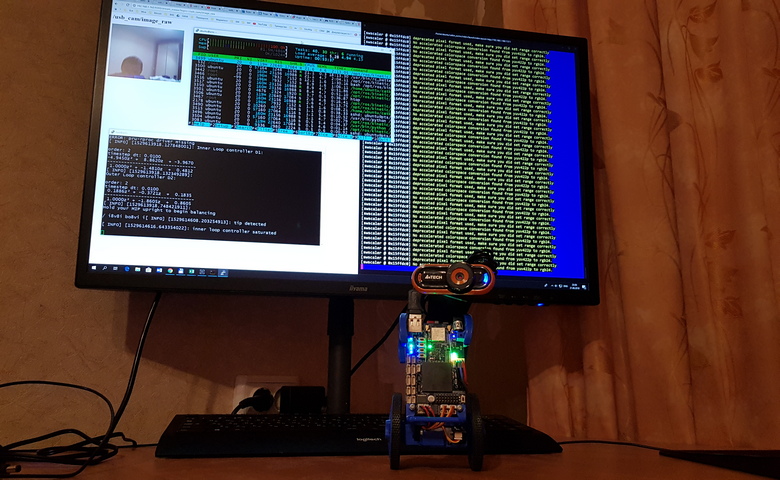
यह ए 4 टेक कैमरा के साथ बीगलबोन ब्लू पर कैसे काम करता है, इसका एक उदाहरण:
बीलेबोन ब्लू यूएसबी कैमरा (मास्टर ROS के साथ एक लैपटॉप पर मान्यता एल्गोरिथ्म काम करता है) से वीडियो पर एक ट्रिपल कार्ड के लिए खोजें।
