सड़क दुर्घटना के शिकार लोगों के लिए व्यापक रूप से फैले शून्य सहिष्णुता कार्यक्रमों के विपरीत, दुनिया में मृत्यु दर बढ़ रही है। और न केवल तीसरी दुनिया के देशों के कारण, बल्कि विज़न ज़ीरो को लागू करने वाले देशों के कारण भी, जहां हाल के वर्षों में मरने वालों की संख्या में गिरावट आई है और यहां तक कि बढ़ने लगी है। आंदोलन की दिशा में एक स्पष्ट संकट है। हम सड़क सुरक्षा (BDD) में सुधार के लिए मुख्य रूप से स्वीकृत अवधारणाओं का विश्लेषण करके इसके कारणों की जांच करेंगे और एक नई अवधारणा पर विचार करेंगे:
- वृद्धि हुई दंड
- परिवहन और बुनियादी ढांचे के सुधार के माध्यम से सुरक्षा में सुधार
- गलत परिवहन और अवसंरचना के माध्यम से बढ़ी हुई सुरक्षा (विजन जीरो)
- मानव चालक को कंप्यूटर से बदलने की संभावना
- नई अवधारणा: "एक सुरक्षित कार के बजाय, एक सुरक्षित परिवहन प्रणाली"
लेखक के बारे में
 लेखक: क्रिवोशेव रोमन वासिलिविच, आविष्कारक।
लेखक: क्रिवोशेव रोमन वासिलिविच, आविष्कारक।
STI प्रौद्योगिकी प्रतियोगिता "विंटर सिटी" के प्रतिभागी ITS SPRUT टीम के प्रमुख, upgreat.one प्रतियोगिता की साइट
लेखक परिवहन समस्याओं को हल करने के लिए एक मौलिक रूप से नए दृष्टिकोण का आविष्कारक है, और, तदनुसार, प्रदान की गई जानकारी का प्राथमिक स्रोत। प्रोजेक्ट साइट ekologurban.livejournal.com
चूंकि परियोजना में कई दर्जन नवाचार हैं जिनका दुनिया में कोई एनालॉग नहीं है, इसलिए लेखों की एक श्रृंखला की योजना बनाई गई है।
यह श्रृंखला में पहला (समीक्षा) लेख है। सभी तस्वीरें क्लिक करने योग्य हैं।
मौजूदा सड़क सुरक्षा अवधारणाओं का विश्लेषण
ऐतिहासिक रूप से, पहली अवधारणा कठोर दंड थी। इसकी अक्षमता लंबे समय से स्पष्ट है: यहां तक कि सभी जुर्माना एक साथ लिया गया है, साथ ही उन जिम्मेदारियों के निष्पादन, एक दुर्घटना में मरने वाले एक भी व्यक्ति को जीवित नहीं कर पाएंगे। हां, और कोई भी कसाव तीन साल तक काम करता है, जिसके बाद एक व्यक्ति को इसकी आदत हो जाती है और शुरुआत में सब कुछ वापस आ जाता है। यही है, पहली अवधारणा बिल्कुल काम नहीं करती है।
बीसवीं सदी के 60 के दशक तक, मरने वालों की संख्या में तेजी से वृद्धि करना संभव नहीं था, और कार निर्माताओं ने कार सुरक्षा (सीट बेल्ट, एयरबैग, एबीएस और इतने पर) को बेहतर बनाने के लिए शुरू किया। और कारों ने खुद को विरूपण क्षेत्रों को ध्यान में रखना शुरू कर दिया। सड़क के बुनियादी ढांचे में फेंडर और डिवाइडिंग बैरियर दिखाई दिए। नब्बे के दशक तक यह स्पष्ट हो गया कि कारों की निष्क्रिय सुरक्षा की भौतिक सीमा समाप्त हो चुकी थी। यही कारण है कि, 110 किमी / घंटा की क्रैश गति के साथ, क्रैश परीक्षण
केवल 60 किमी / घंटा की गति से आयोजित किया गया। इस प्रकार, दूसरी अवधारणा बहुत प्रभावी थी, लेकिन इसकी क्षमताएं लगभग पूरी तरह से समाप्त हो गई हैं।
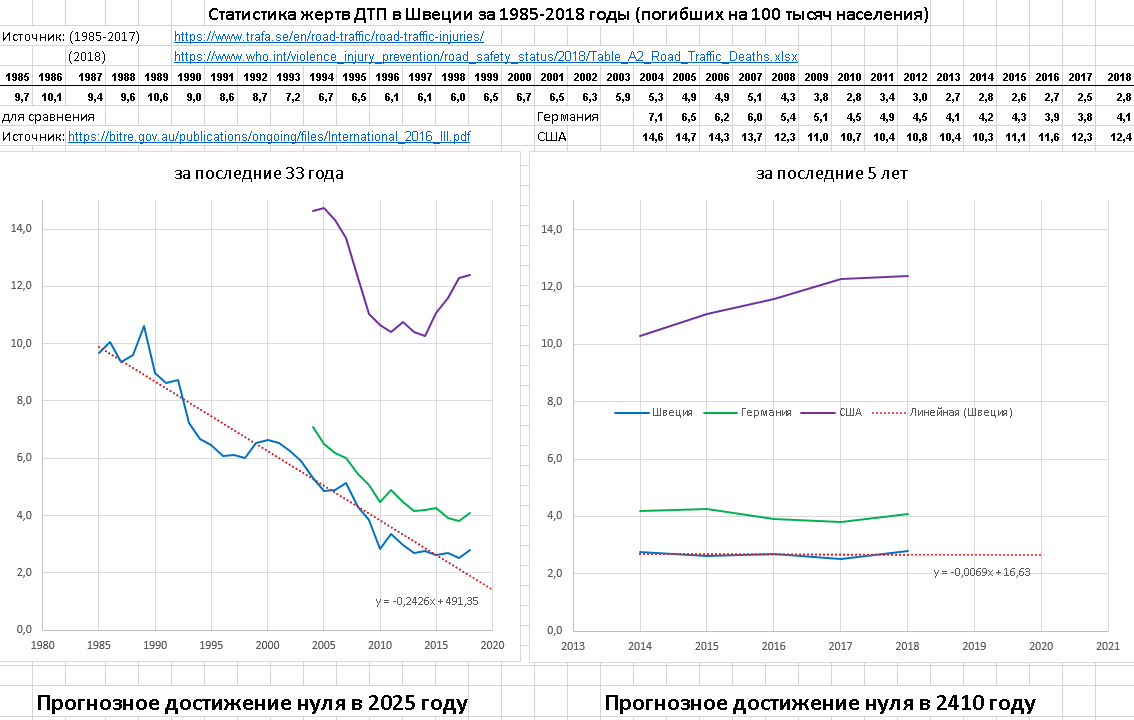
इसे महसूस करते हुए, सहस्राब्दी के मोड़ पर, परिवहन में सुधार के लिए एक नई अवधारणा की खोज करने के बजाय, परिवहन लोकलुभावन धोखाधड़ी में लगे हुए थे और परिवहन और बुनियादी ढांचे की विशेषताओं को आकर्षित करना शुरू कर दिया। यह कहा गया था कि कारें बहुत तेजी से चलती हैं और प्रशासनिक और बुनियादी ढाँचे दोनों उपायों से इस गति को हर तरह से कम किया जाना चाहिए। इस अवधारणा में सबसे आगे स्वीडन था, जिसने 1997 में विज़न जीरो के रूप में जाना जाने वाला एक कार्यक्रम अपनाया। 2020 तक शून्य स्तर प्राप्त करने के लक्ष्य के साथ, सड़क दुर्घटनाओं में होने वाली मौतों के लिए लक्ष्य को "शून्य सहिष्णुता" घोषित किया गया था। वर्ष 2020 तक, यह स्पष्ट है कि यह कार्यक्रम पूरी तरह से विफल हो गया है।
यदि हम दृष्टि शून्य के बारे में अधिकांश लेख लेते हैं, तो सुरक्षा की "संभावित वृद्धि" की अनुसूची 2010 या 2013 में समाप्त हो जाएगी। क्यों? लेकिन क्योंकि 2013 के बाद, दृष्टि शून्य कार्यक्रम ने काम करना बंद कर दिया था! 2013 के मूल्यों के आसपास गिरावट और उतार-चढ़ाव से मृत्यु टोल बंद हो गई। इसके अलावा, स्वीडन में सांख्यिकीय रूप से महत्वपूर्ण पिछले 5 वर्षों का पूर्वानुमान ग्राफ वर्ष 2410 तक केवल एक संभावित शून्य देता है!
लेकिन यह मुख्य समस्या नहीं है, क्योंकि मौतों की संख्या में एक गंभीर कमी अभी भी हासिल की गई थी। मुख्य समस्या यह है कि विज़न जीरो की सफलता बहुत अतिरंजित है, और सामान्य तरीके धोखाधड़ी हैं। चूंकि सड़क दुर्घटनाओं के शिकार लोगों की संख्या में कमी SAFETY में वृद्धि के कारण नहीं, बल्कि परिवहन और परिवहन बुनियादी ढांचे की विशेषताओं में DECREASE की वजह से हासिल की जाती है। लेकिन यह वही है जो अपने दांतों को कुंद करके आरी की सुरक्षा बढ़ाता है। हां, यह अधिक सुरक्षित होगा, लेकिन इस तथ्य के कारण कि यह कटौती करना बदतर हो जाएगा। और यह सभी विजन जीरो ऑफ़र का सार है! खुद के लिए देखें, दृष्टि शून्य के सभी चार क्षेत्र इस तरह के धोखाधड़ी हैं:
- विज़न जीरो को परिवहन की गति को सुरक्षित 50 या 30 किमी / घंटा तक कम करने की आवश्यकता है। लेकिन यह बेतुका है! आइए फिर तुरंत कारों की गति को शून्य तक कम करें, या कारों को भी प्रतिबंधित करें। कोई कार नहीं, कोई कार नहीं मारी गई। अर्थात्, सबसे अच्छी दवा गिलोटिन है। लेकिन इससे पहले (दूसरी अवधारणा में), गति को कम किए बिना सुरक्षा बढ़ाने के लिए समाधान विकसित किए गए थे।
- विज़न जीरो शारीरिक रूप से पैदल चलने वालों और वाहनों को नष्ट करने की पेशकश करता है, जिससे सभी पैदल यात्री क्रॉसिंग नॉन-स्ट्रीट हो जाते हैं। हां, पैदल यात्री सुरक्षा बढ़ेगी, लेकिन पैदल यात्री आराम को कम करने की कीमत पर। इसके अलावा, बुजुर्गों के लिए यह आमतौर पर घातक है, क्योंकि हर कोई शारीरिक रूप से तीसरी मंजिल तक नहीं जा सकता है और फिर नीचे चला जाता है। और ऑफ-स्ट्रीट क्रॉसिंग की भारी कीमत ने मुझे इस विचार को छोटे और समृद्ध स्वीडन में भी छोड़ दिया। हालांकि, कई देशों में, विजन जीरो के लिए, वे एक ही रेक पर कदम रखते हैं।
- विजन जीरो सभी उपनगरीय सड़कों को बीच में एक विभाजन अवरोधक के साथ किया जाता है। विचार अच्छा है, केवल ओवरटेकिंग के अवसरों के लिए, सभी सड़कों को फोर-लेन (प्रत्येक दिशा में दो लेन) में बनाना होगा। लेकिन यह एक छोटे और अमीर स्वीडन के लिए भी महंगा था। इसलिए, उन्होंने बचाने का फैसला किया और चार नहीं, बल्कि तीन लेन वाली सड़कों को "भटकते हुए मध्य लेन" के साथ। क्या इससे सुरक्षा बढ़ी है? हां, यह बढ़ गया है, लेकिन यह केवल इसलिए चुप है कि इस वजह से THREE द्वारा कम हो गया है! तीन बैंड के लिए भुगतान किया, और थ्रूपुट दो बैंड है।
- मोटर चालकों के खिलाफ भेदभाव। यहाँ कोई टिप्पणी नहीं, कोई भी भेदभाव अस्वीकार्य है। लेकिन धोखाधड़ी का सिद्धांत समान है, हम एक को दूसरे की कीमत पर सुधारते हैं।
हां, निश्चित रूप से, सुरक्षा सभी से ऊपर और महंगी है, लेकिन आपको यह समझने की आवश्यकता है कि विज़न जीरो समाधान बहुत अप्रभावी हैं और समस्या का इलाज नहीं हैं, लेकिन केवल महंगी बैसाखी हैं। समस्या यह है कि इन फैसलों को लगभग सही और दूसरे देशों पर थोपी गई बातों के रूप में प्रचारित किया जाता है, क्योंकि उनके पास कोई विकल्प नहीं है। विशेष रूप से, यह वास्तव में ये विचार हैं जो रूसी एनटीआई रोडमैप में लिखे गए हैं, और इस आधार पर सड़क सुरक्षा में सुधार के लिए अन्य अवधारणाओं को आसानी से नहीं माना जाता है।
विज़न ज़ीरो की कपटपूर्ण प्रकृति कोई रहस्य नहीं है। और कई देशों में, उदाहरण के लिए, संयुक्त राज्य अमेरिका में, इस कार्यक्रम को लागू करने का सक्रिय रूप से उन लोगों द्वारा विरोध किया जाता है जो इस कार्यक्रम से सहमत नहीं हैं "आप नीचे जाएं, जहां आप जाते हैं, वहां से जारी रहेगा।"
यदि आप दुनिया के अमीर देशों के सुरक्षा चार्ट को देखते हैं, तो हम देखेंगे कि हाल ही में मौतों की संख्या हर जगह स्थिर हो गई है और घटने बंद हो गई है (संयुक्त राज्य अमेरिका में मामूली वृद्धि सस्ते गैसोलीन के कारण कार माइलेज में उल्लेखनीय वृद्धि से जुड़ी है, और प्रति यूनिट माइलेज की संख्या व्यावहारिक रूप से नहीं बदलती है। और संयुक्त राज्य अमेरिका में)। हां, यह स्थिरीकरण विभिन्न देशों के लिए विभिन्न स्तरों पर हुआ है। और यह स्तर सीधे विभिन्न देशों में कारों के उपयोग की तीव्रता पर निर्भर करता है। 21 वीं सदी में हर कोई पैदल यात्री की गति से 19 वीं सदी के गांव की लय में नहीं रहना चाहता। और यह दृष्टि शून्य का बिंदु है - एक पैदल यात्री और एक साइकिल की गति के साथ परिवहन की गति को कम करने के लिए।
सौभाग्य से, हाल ही में (2020 बस कोने के आसपास है), विजन जीरो कार्यक्रम की विफलता अप्रत्यक्ष रूप से स्वीडन में भी पहचानी जाने लगी है। सबसे पहले, समय सीमा को स्थगित कर दिया गया, और फिर शून्य को प्राप्त करने के संघर्ष को शून्य की दिशा में एक आंदोलन में बदल दिया गया। हालांकि, पिछले 5 वर्षों के आंकड़े स्पष्ट रूप से दिखाते हैं कि यहां तक कि शून्य के लिए कोई आंदोलन नहीं है। इसलिए, दृष्टि शून्य अवधारणा एक घोटाला है। इसके अलावा, सबसे महत्वपूर्ण बात यह है कि इस धोखाधड़ी ने पहले ही काम करना बंद कर दिया है।
इसलिए, अब वे तेजी से सड़क सुरक्षा में सुधार के लिए ऑटोपायलट की भूमिका के बारे में बात कर रहे हैं। और पहले से ही यहाँ और अब। लेकिन इस मामले में, हम धोखाधड़ी के बारे में भी बात कर रहे हैं। यह कथन कि एक ऑटोपायलट किसी व्यक्ति की तुलना में बेहतर है तथ्यों पर आधारित नहीं है (क्योंकि अभी तक कोई ऑटोपायलट नहीं है, कोई भी तथ्य नहीं हो सकता है कि वह किसी व्यक्ति से बेहतर है)। और सभी पीआर इलोन मास्क के "विशलिस्ट" और आंकड़ों के साथ उसकी धोखाधड़ी पर बनाया गया है। लेकिन टेस्ला ऑटोपायलट का उपयोग करते समय जो आंकड़े कम होते हैं, वे धोखाधड़ी होते हैं, क्योंकि छद्म ऑटोपायलट केवल साधारण मौसम और सड़क की स्थिति में काम करता है, जब दुर्घटनाओं की संभावना बेहद कम होती है। ज्यादातर दुर्घटनाएं खराब परिस्थितियों में ठीक होती हैं जब छद्म ऑटोपायलट काम नहीं करता है, और निश्चित रूप से, ये दुर्घटनाएं छद्म ऑटोपायलट के आंकड़ों को खराब नहीं करती हैं।
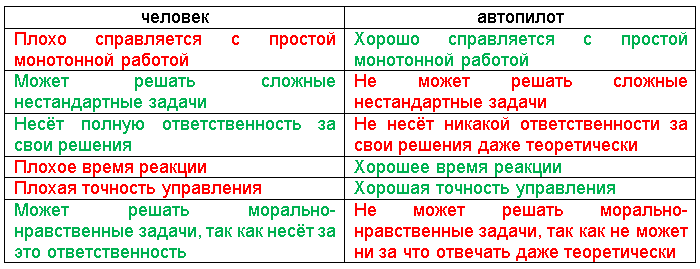
तो चलिए यह पता लगाते हैं कि यह अवधारणा खुद कितनी "ऑटोपायलट आदमी से बेहतर है" सच है। वास्तव में, इसके लिए एकमात्र तर्क यह है कि कंप्यूटर "मानव कारक" त्रुटियों को नहीं बनाता है। यह सच है, साथ ही तथ्य यह है कि एक व्यक्ति "कंप्यूटर कारक" की गलतियों को नहीं करता है। इस प्रकार, "कंप्यूटर कारक" द्वारा "मानव कारक" के प्रतिस्थापन पर विचार किया जाता है। लेकिन यह इस तथ्य से बहुत दूर है कि कुल राशि सकारात्मक होगी, विशेष रूप से विचार, उदाहरण के लिए, हैकर्स।
एक वाजिब सवाल यह उठता है कि फिर साबुन को साबुन में क्यों बदलें? आइए एक तालिका बनाएँ:
इसके अलावा, सिद्धांत में ऑटोपिलॉट के नुकसान को हल नहीं किया जा सकता है, क्योंकि उन्हें न केवल एक मजबूत एआई की आवश्यकता होती है, बल्कि एक मजबूत कृत्रिम अवधारणा। और वह अभी तक इस परियोजना में भी नहीं है, लेकिन यहां तक कि अगर यह प्रतीत होता है, तो उसके पास एक व्यक्तिगतता के सभी अधिकार होंगे, और यह इस तथ्य से बहुत दूर है कि वह किसी व्यक्ति के लिए काम करना चाहता है।
इस प्रकार, यहां तक कि एक व्यक्ति और एक ऑटोपायलट के पेशेवरों और विपक्षों की एक औपचारिक समानता के साथ, पीआर विशेषज्ञ हमें यह समझाने की कोशिश करते हैं कि ऑटोपायलट एक व्यक्ति की तुलना में अधिक सुरक्षित है!
यहां तक कि पीआर विशेषज्ञ भी इसे समझने लगे थे, और सीईएस -2019 में उन्होंने स्वीकार किया कि पांचवें स्तर की स्वायत्तता, दूर के भविष्य की चीज है, और हमें तीसरे स्तर की स्वायत्तता पर ध्यान केंद्रित करना चाहिए ( रोबोमोबाइल उद्योग, आखिरकार, अधिक यथार्थवादी हो जाता है )। इस प्रकार, 2019 तक, यह स्पष्ट हो गया कि ऑटोपायलट के कारण बढ़ती सुरक्षा की आशाजनक अवधारणा, कम से कम, अनिश्चित काल के लिए स्थगित हो जाती है।
संक्षेप में: सड़क सुरक्षा में सुधार के लिए सभी मौजूदा और आशाजनक अवधारणाएं स्वयं समाप्त हो गई हैं और निकट भविष्य में सुरक्षा में उल्लेखनीय वृद्धि नहीं कर पाएंगे। और यहां तक कि एक मजबूत एआई एक आशाजनक स्वचालित कार की मुख्य समस्या को हल करने में सक्षम नहीं होगा, अर्थात्, सूचना की कमी के साथ वास्तविक अराजक यातायात के "संकल्प" पर निर्णय लेने के लिए जिम्मेदारी की समस्या।
सुरक्षित कार के बजाय, सुरक्षित परिवहन प्रणाली
लेकिन सब कुछ इतना निराशाजनक नहीं है! तालिका का विश्लेषण एक बहुत ही दिलचस्प विशेषता दिखाता है: जहां एक व्यक्ति खराब है, कंप्यूटर अच्छा है और इसके विपरीत। फिर एक हाइब्रिड बनाने के लिए एक तार्किक विचार है जो दोनों दृष्टिकोणों के लाभों को जोड़ती है और उनकी कमियों से मुक्त होती है। इस प्रकार, सबसे बड़ी सुरक्षा, एआई विकास के वर्तमान और भविष्य के स्तर को देखते हुए, गैर जिम्मेदाराना ऑटोपायलट नहीं होगा, लेकिन इस तरह के एक संकर विकल्प:
“मनुष्य हर चीज के लिए जिम्मेदार है। इलेक्ट्रॉनिक्स संकेत देता है (रीडिंग सिस्टम, रोड सिग्नल, ब्लाइंड स्पॉट मॉनिटरिंग और इतने पर मार्किंग) और ड्राइवर की एक आखिरी कमांड (एक लेन में रहना, लेन बदलना, दूरी बनाए रखना, पार्क करना) को निष्पादित कर सकता है। इलेक्ट्रॉनिक्स चालक के आपातकालीन कार्यों (आपातकालीन ब्रेकिंग सिस्टम) को बिना किसी बाधा के रोक सकते हैं। "
जाहिर है, यह संभावित विकल्प मृतकों की अनुपस्थिति की गारंटी नहीं देता है, हालांकि व्यक्ति मौजूदा अराजक यातायात "razrulivanie" के परिणामों के लिए जिम्मेदार है, लेकिन "razrulivanie" के परिणाम स्वयं आदर्श से बहुत दूर हैं। इसके अलावा, सैद्धांतिक रूप से भी (ट्रॉली कार्य) CHAOS को व्यवस्थित करना असंभव है। तो हम अंत में बुनियादी सड़क सुरक्षा समस्या पाया! आपको बस सड़क पर इस अराजकता से छुटकारा पाने की आवश्यकता है! अर्थात्, मौजूदा CHAOTIC सड़क यातायात, जब हर कोई चाहता है, और यातायात नियम केवल प्रकृति में सलाहकार हैं, "स्वचालित रूप से केंद्रीय प्रेषण द्वारा नियंत्रित PLAN यातायात" द्वारा प्रतिस्थापित किया जाना चाहिए। और योजना को स्वयं तैयार किया जाना चाहिए ताकि, सिद्धांत रूप में, कोई अस्पष्ट परिस्थितियां न हों, जिसके लिए उत्तर देना आवश्यक होगा। इस प्रकार, ड्राइवर केवल एक निष्पादक है और केवल स्वचालित प्रेषण निर्णयों के सही निष्पादन के लिए जिम्मेदार है। और चूंकि निर्णय लिया जा सकता है, यहां तक कि एक साधारण कंप्यूटर भी एक व्यक्ति की तुलना में बहुत बेहतर हो सकता है, एक पूर्ण-स्वचालित स्वचालित कार एक मुफ्त बाय-प्रोडक्ट के रूप में अपने आप से बाहर हो जाती है, और आमतौर पर किसी भी खुफिया की आवश्यकता नहीं होती है।
इस तरह की एक मौलिक नई अवधारणा परिवहन सुरक्षा की समस्याओं को पूरी तरह से यहाँ और अभी हल करने में सक्षम है, और इसकी एक बार की लागत एक दुर्घटना से होने वाली वार्षिक आधिकारिक क्षति से कई गुना कम है। इस अवधारणा को लेखक द्वारा विकसित किया गया था और इसे पूर्ण विनियमन और परिवहन प्रबंधन (ITS SPRUT) के इंटेलिजेंट ट्रांसपोर्ट सिस्टम में लागू किया गया था। इसका सार: पहले से ही यातायात नियमों के उल्लंघन के लिए निरर्थक जुर्माना जारी करने के बजाय, हमें कला "मूर्खता से सुरक्षा" प्रणाली में एक अच्छी तरह से ज्ञात की आवश्यकता है जो आपको जानबूझकर यातायात नियमों का उल्लंघन करने की अनुमति नहीं देगा। और यद्यपि एक पूरी तरह से सुरक्षित कार असंभव है (यदि आप दुर्घटना नहीं करते हैं, तो वे आप में दुर्घटनाग्रस्त हो जाएंगे), एक बिल्कुल सुरक्षित केंद्रीकृत परिवहन प्रणाली बनाना आसान है जो तकनीकी खराबी के लिए 100% सुरक्षा की गारंटी दे सकता है।
शास्त्रीय केंद्रीय प्रेषण के गुणों पर एक छोटा शैक्षिक कार्यक्रम: इस तरह की कोई भी प्रणाली केवल सभी प्रतिभागियों के लिए पूर्ण और अनिवार्य हो सकती है। हालांकि, यह पता चला है कि "विशेषज्ञों" के विशाल बहुमत को यह समझ में नहीं आता है। हालांकि ये गुण काफी स्पष्ट हैं: कल्पना करें कि यदि डिस्पैचर रनवे के केवल आधे हिस्से को नियंत्रित करता है, या अगर कम से कम एक पायलट डिस्पैचर की आज्ञाओं का पालन नहीं करता है, तो केंद्रीय प्रेषण प्रणाली एरोड्रम पर कैसे काम करेगी।
"ITS SPRUT" के कार्य के सिद्धांत पर विचार करें
सबसे पहले, हमें ट्रैफ़िक के बारे में पूरी जानकारी चाहिए, जो कि कार से भी सैद्धांतिक रूप से प्राप्त करना असंभव है (कार में कोई तकनीक स्थापित नहीं है जो एक बच्चे को एक यात्री कार के पीछे भी देख सकती है)। और कोई भी होनहार "कार टू एक्स" सिस्टम समस्या को हल नहीं कर सकता है, क्योंकि सैद्धांतिक रूप से भी वे पूर्ण नहीं हो सकते हैं, और एक निश्चित स्तर पर वे भी कम सुरक्षा करेंगे।

(केंद्र में कार से दृश्य है, जब रोकना अभी भी संभव है)
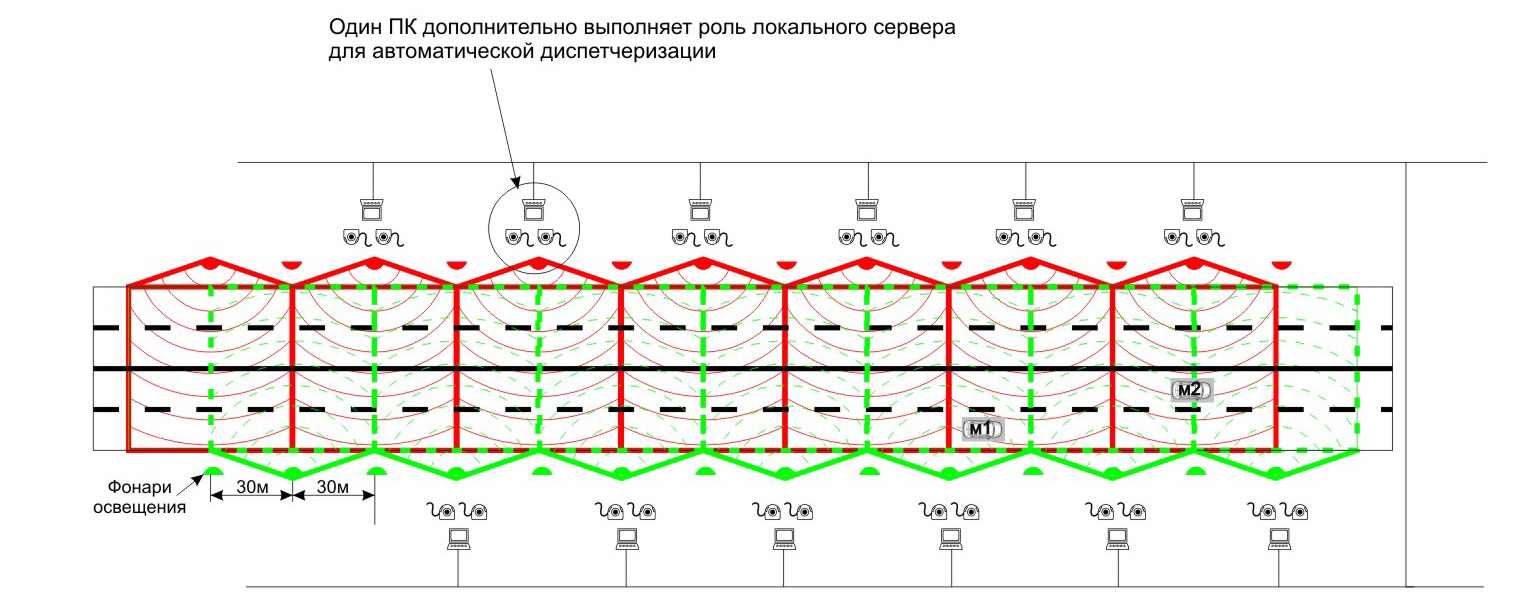
इसलिए, सेलुलर सिद्धांत द्वारा आयोजित सभी सड़कों के लिए एक बाहरी स्थायी निगरानी प्रणाली की आवश्यकता है। "ITS SPRUT" में एक बड़े देखने के कोण के साथ साधारण कैमरे होते हैं, जो मौजूदा प्रकाश डंडे से ऊपर से नीचे तक निर्देशित होते हैं। नतीजतन, वास्तविक समय में ITS SPRUT में सभी सड़कों के शीर्ष दृश्य की एक योजना है, जिस पर सिद्धांत रूप में कोई मृत क्षेत्र नहीं हो सकता है, क्योंकि प्रत्येक बिंदु को चार कैमरों से देखा जाता है (लड़ाकू विमानों के स्तर पर दोहराव की विश्वसनीयता)। इस प्रकार, जानकारी की कमी की समस्या पूरी तरह से हल हो गई है।
ऐसी प्रणाली की कीमत 10 हजार डॉलर प्रति किलोमीटर है। अर्थात्, पूरे रूस के लिए एक बार की लागत लगभग वार्षिक CTP + CASCO भुगतान के बराबर है, और सड़क दुर्घटनाओं से होने वाली वार्षिक आधिकारिक क्षति से तीन गुना कम है।
दूसरा, सभी संघर्ष स्थितियों के सुरक्षित समाधान के लिए, एक केंद्रीय प्रेषण प्रणाली की आवश्यकता होती है, जैसे कि विमानन में, केवल स्वचालित मोड में। यही है, ड्रग पर सभी परस्पर विरोधी स्थान यातायात-विनियमित हो जाते हैं। ऐसा करने के लिए, यह प्रत्येक कार में "व्यक्तिगत ट्रैफ़िक लाइट" (आईएस) स्थापित करने के लिए पर्याप्त है, जिसमें लगातार दो-तरफा संचार के साथ ITS SPUTUT है। प्रत्येक कार के सामने, एक एलईडी पट्टी स्थापित की गई है जो पैदल यात्रियों के लिए एक आईपी के रूप में कार्य करती है। इस प्रकार, सभी सड़क उपयोगकर्ताओं के बीच बातचीत की समस्या पूरी तरह से हल हो गई है।

तीन हजार रूबल से आईपी की लागत, जो एक बच्चे की कार की सीट की औसत लागत से कम है।
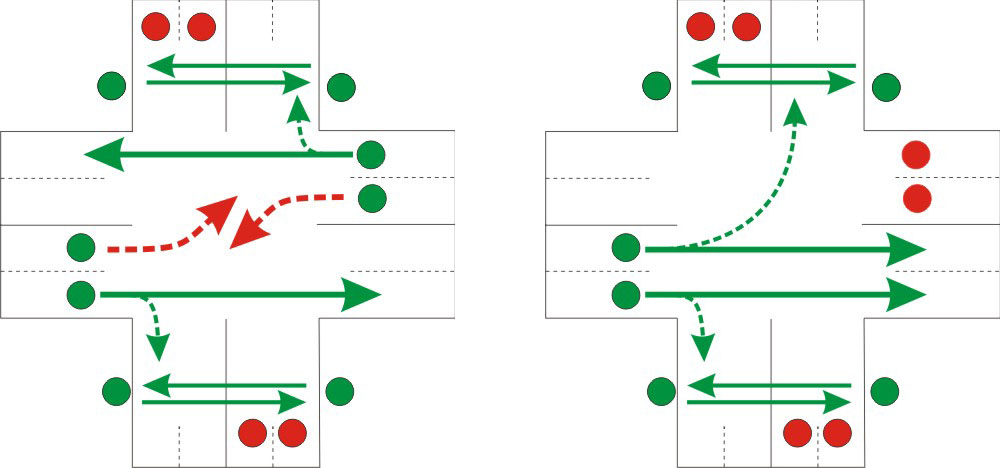
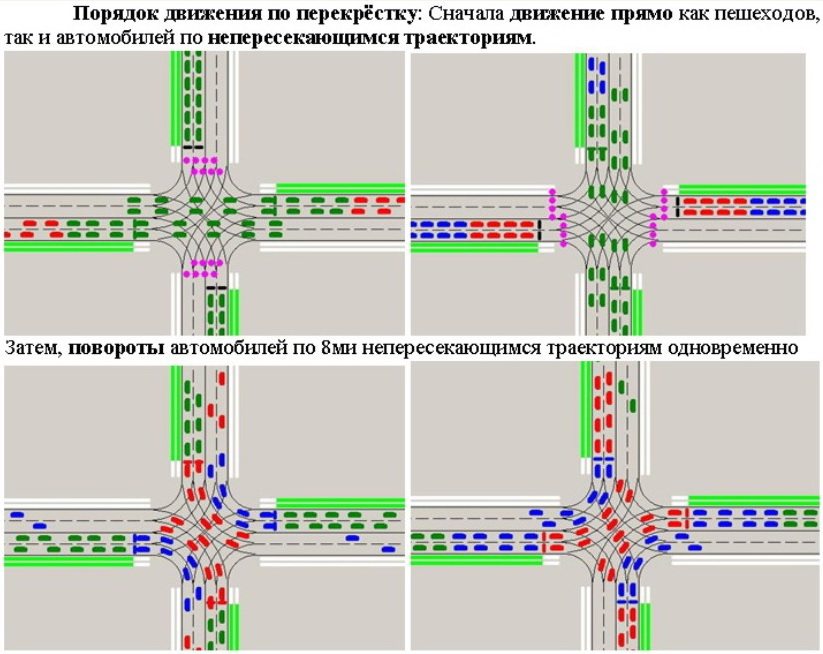
इसलिए, आईपी की स्थापना को अनिवार्य बनाया जा सकता है। यह इस तरह काम करता है। सूचना को वास्तविक समय में आईपी स्क्रीन पर प्रदर्शित किया जाता है: ऊपर से एक योजना दृश्य, नेविगेशन के बारे में सटीक और वर्तमान जानकारी, वर्तमान सड़क संकेतों का प्रभाव, अधिकतम गति, हरी लहर की गति, और इसी तरह। सुविधा के लिए, नियंत्रण के लिए आवश्यक सभी जानकारी ट्रैफ़िक लाइट सिद्धांत के अनुसार आवाज़ और एलईडी टेप द्वारा दोहराई जाती हैं। उदाहरण के लिए, एक बिल्कुल सुरक्षित टर्न इस प्रकार किया जाता है: लेफ्ट टर्न सिग्नल सहित, ड्राइवर, ITS SPKUT सिस्टम के लिए एक टर्न रिक्वेस्ट भेजता है। सुरक्षा की जांच करने के बाद, मोड़ को शुरू करने की अनुमति देने के क्षण में, बाईं ओर एलईडी सिग्नल पर हरी पट्टी रोशनी को बढ़ाती है। क्षैतिज टेप हरी लहर की गति के सापेक्ष गति मोड को निर्धारित करता है, और निमिष आवृत्ति विचलन को निर्धारित करता है। गति पर विचार करें: चालक को गैस को दबाने दें। गति और त्वरण की गणना करने के बाद, "ITS SPRUT" पहली चेतावनी पर मुड़ता है - एक बड़े अंतराल के साथ लाल निमिष, जिसका अर्थ है कि यदि त्वरण उसी गति से जारी रहता है, तो कुछ सेकंड के बाद अनुमेय गति पार हो जाएगी। यदि ड्राइवर ने इसे अनदेखा कर दिया है, तो फ्लैशिंग आवृत्ति बढ़ जाती है और स्पीकरफ़ोन के माध्यम से दूसरी चेतावनी प्रसारित होती है। यदि उनके ड्राइवर ने इसे नजरअंदाज कर दिया, तो हमने उद्देश्यपूर्ण सबूतों का दस्तावेजीकरण किया है कि चालक कार को पर्याप्त रूप से चलाने में सक्षम नहीं है। « » .
, . « » ( ). , , , . , , , . , , . , , , « » .
« » ( ). , « » , , . .

, . . 3 . « » , . , , .
, « » . , , , .
, , , , . ( ).

, , , , . « » . , , . , , . « ».
« » . . .
« », 120 . . ( 12 ). « » .
. , « , ».
, , . . : 30 , . , , . , , , . , , , , . . , , . . , , , . ( ). , , , , . . , .
, ( ) , ( ).

« »
, « » , , , , . « » , ( ) :
- « », -. , .
- , (, , + , ). , .
, . . , . .
, « » , ( ), .
, 20% , , .
. , ( ) , . ( , , , ). « », -, , . , , , , 30 . : , , . « », , , . . , . , , , « » , .
« » , . .
, . , , , . , , , , . . , , .
. - , . « » , , , , . , « » . , , . , . ( , ) .
: « » 100% . , : « ». , , « » , . « » -, , , .

, . ekologurban.livejournal.com.
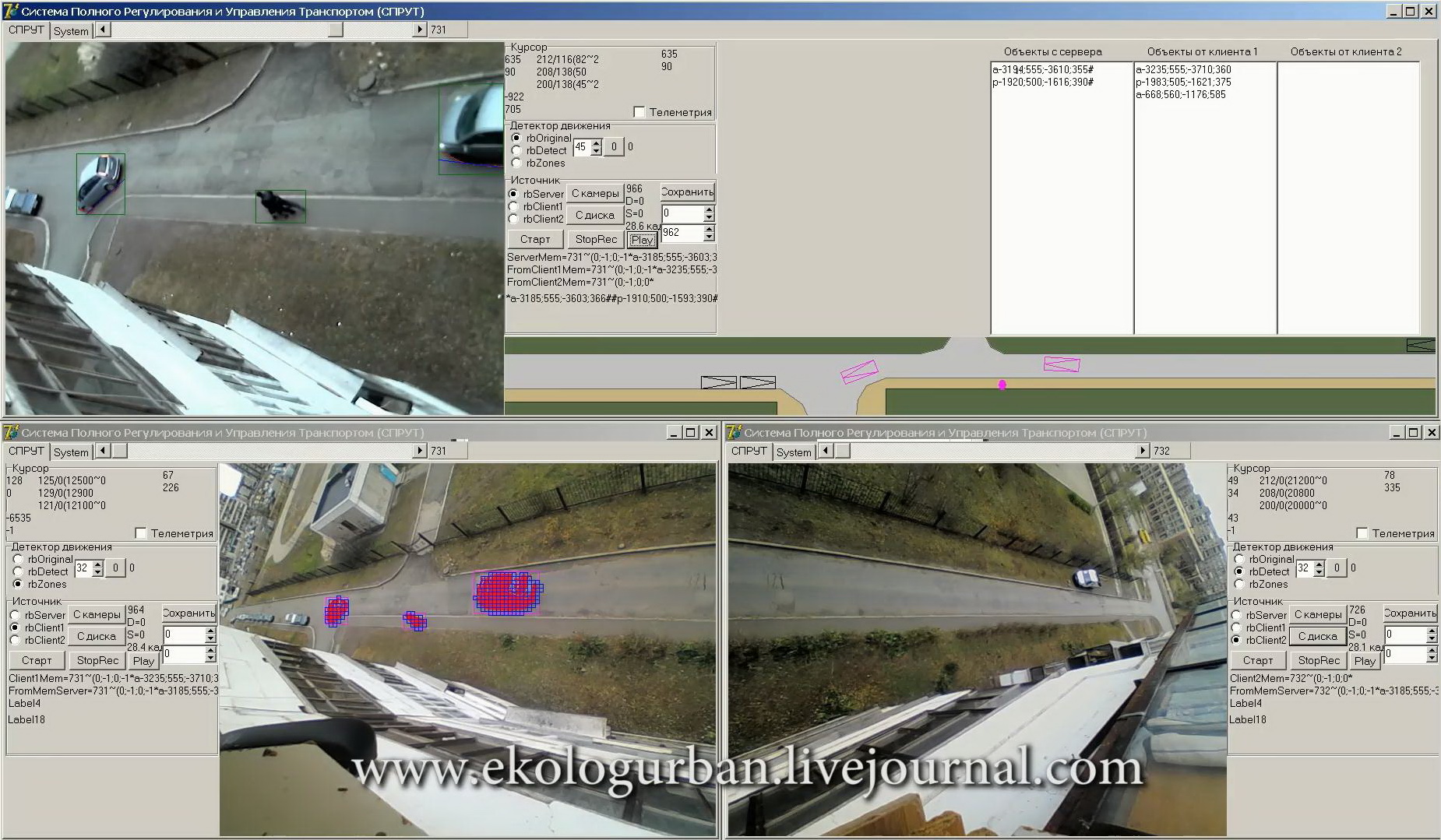
यहाँ हम कुछ उदाहरणों के साथ सामान्य सिद्धांतों पर विचार करते हैं।
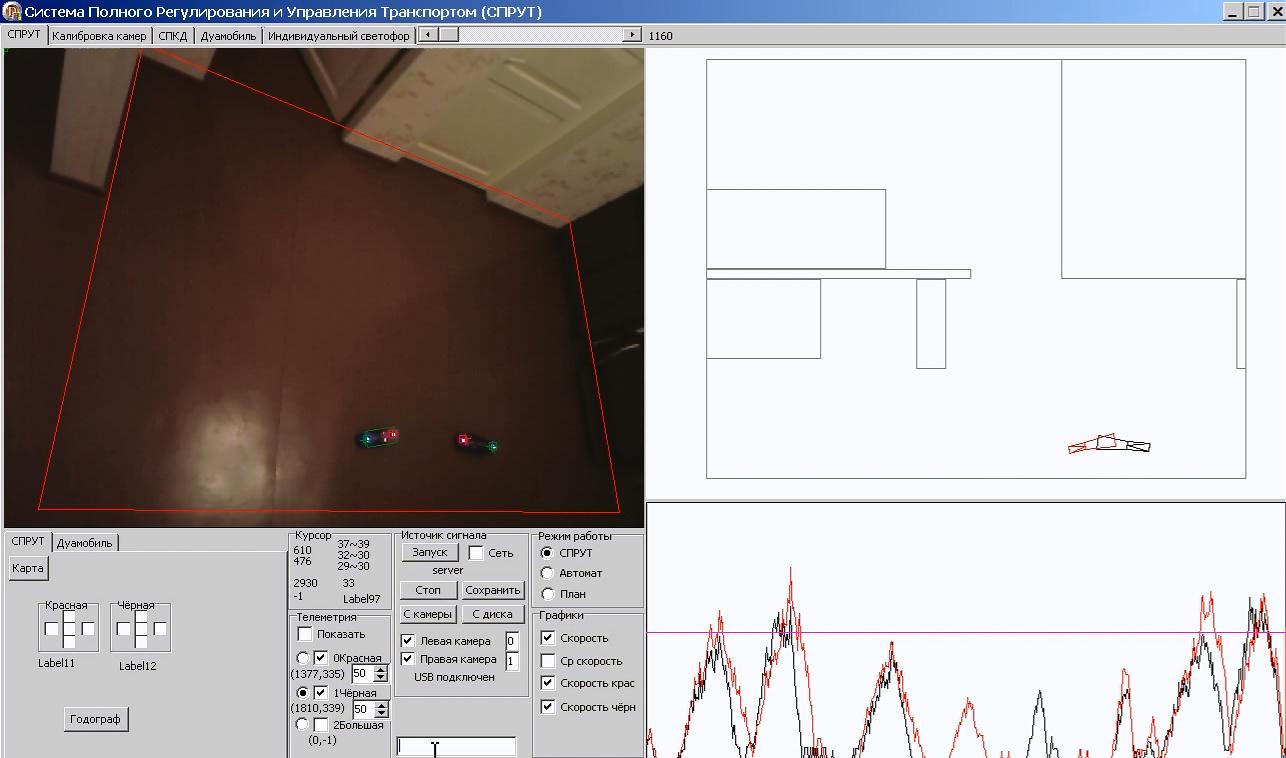
वास्तविक समय में ऑन-स्क्रीन प्रोग्राम प्रदर्शित होते हैं: ऊपर बाईं ओर - आईटीएस SPRUT सिस्टम कैमरा से वीडियो, दाईं ओर - सड़क के एक हिस्से के शीर्ष दृश्य का एक आरेख, नीचे दाएं - वाहन की गति के ग्राफ, बाएं - नियंत्रण। चूंकि सुरक्षा प्रणाली के लिए मुख्य बात विश्वसनीयता है, हम समस्या को सरलतम, सबसे विश्वसनीय और समझने योग्य चित्रमय तरीके से हल करेंगे। योजना के दृष्टिकोण पर, हम सड़क की सभी वस्तुओं और सभी सड़क उपयोगकर्ताओं को अपने सुरक्षा क्षेत्रों (सड़क के उन हिस्सों को आकर्षित करते हैं जहां वे आपातकालीन ब्रेकिंग के लिए आवश्यक समय के लिए वर्तमान नियंत्रण की कार्रवाई के तहत हो सकते हैं)। इस प्रकार, यदि वाहन का सुरक्षा क्षेत्र किसी भी बाधा से टकराता है, तो आईएस के माध्यम से आपातकालीन ब्रेक लगाना, हमें बाधा से टकराने के बिना ब्रेक लगाने के लिए समय की गारंटी है। विस्तारित संस्करण में, संभावित खतरे को इंगित करते हुए एक चेतावनी क्षेत्र भी जोड़ा जाता है। इसका आकार चालक के निर्धारित प्रतिक्रिया समय पर निर्भर करता है। उसी समय, ऑब्जेक्ट वास्तविक और आभासी दोनों हो सकते हैं, उदाहरण के लिए, एक लाल ट्रैफ़िक सिग्नल, वर्चुअल रोड मार्किंग, वर्चुअल पैदल यात्री क्रॉसिंग, सड़क का काम, और इसी तरह। किसी भी मामले में, उनमें भागना असंभव है। इस प्रकार, जब तक यूक्लिडियन ज्यामिति सच है, तब तक तकनीकी रूप से तकनीकी खराबी तक यातायात दुर्घटनाएं असंभव हैं।
आइए हम तेजी की असंभवता को साबित करें: इसके लिए यह तेजी से आगे बढ़ने पर गति को अवरुद्ध करने के लिए पर्याप्त है, और अगर यह कम हो जाता है तो अनुमति देने के लिए। इसलिए, यहां तक कि एक निरंतर "गैस से फर्श तक" कार झटकेदार हो जाएगी, लेकिन निर्धारित गति से अधिक नहीं। इसके अलावा, गति सीमा प्रासंगिक है और विशिष्ट स्थान और समय पर निर्भर करती है (उदाहरण के लिए, केवल दोपहर में स्कूलों के सामने); चालक की योग्यता के आधार पर व्यक्तिगत, साथ ही टायर और इतने पर। इस प्रकार, विज़न जीरो रोड इंफ्रास्ट्रक्चर (स्पीड बम्प्स, ट्रैफ़िक को "शांत करने" और इसी तरह) के सभी कृत्रिम बिगड़ने सुरक्षा के दृष्टिकोण से अर्थहीन हो जाते हैं!
"आने वाली लेन में जाने" की असंभवता को मॉडलिंग करने का एक उदाहरण
वास्तव में, आने वाली लेन में जाना सीधे दुर्घटना का कारण नहीं है। इसका कारण इस युद्धाभ्यास की गलत गणना और इसके प्रतिभागियों की असहयोगात्मक कार्रवाइयां हैं। प्रत्येक दिशा में एक लेन में दो-तरफ़ा सड़क पर विचार करें।

सामान्य अवस्था में, दोनों बैंड को एक असाध्य आभासी अवरोध (ठोस रेखा) द्वारा अलग किया जाता है। चलो, एक काले रंग की कार गलियों में से एक पर खड़ी है, और एक लाल पीछे से आ रहा है। सबसे पहले, ITS SPRUT लगातार दूरी के पालन की निगरानी करता है, अर्थात्, जब सामने वाली कार के लिए एक खतरनाक दृष्टिकोण दूर से ब्रेक को सक्रिय करता है। इसके अलावा, एक ठोस लाइन के माध्यम से एक काली कार के चारों ओर जाना असंभव है, इसलिए, एक लाल के अनुरोध पर, ITS SPRUT अस्थायी रूप से वन-वे ट्रैफ़िक (ऊपर की आकृति में) के साथ दो-लेन सड़क का एक आभासी अनुभाग बनाता है। और ओवरटेकिंग पूरी होने के बाद, यह खंड फिर से वस्तुतः तरल हो जाता है, और आने वाली लेन में फिर से जाना असंभव है। इस प्रकार, आने वाली लेन में बाहर निकलने के साथ एक संभावित खतरनाक ओवरटेकिंग को हमेशा आने वाली लेन में जाने के बिना अग्रिम से बदल दिया जाता है।
ट्रैफ़िक दुर्घटनाओं के अन्य सभी कारणों का उसी तरह अनुकरण किया जाता है।
इस प्रकार, हमने प्रयोगात्मक रूप से सड़क दुर्घटनाओं में होने वाली मौतों की संख्या में लगभग शून्य तक की कमी साबित कर दी, जो कि वाहन की तकनीकी खराबी के कारण थी। लेकिन ITS SPRUT प्रणाली की उपस्थिति में, अधिकांश तकनीकी खराबी भी दुर्घटनाओं का कारण नहीं बनेंगी। चूंकि, एक प्रारंभिक चरण में एक दोषपूर्ण कार की पहचान करने के बाद, ITS SPRUT इसके लिए एक नि: शुल्क गलियारा बनाता है, जिससे आसपास की कारों को उचित आदेश भेजे जाते हैं। इसलिए, ज्यादातर मामलों में, एक दोषपूर्ण कार दूसरों के साथ नहीं टकराएगी और गंभीर क्षति के बिना सुरक्षित रूप से बंद हो जाएगी। इसके अलावा, तकनीकी खराबी के परिणामों को एक दुर्घटना के रूप में मानना बुनियादी रूप से गलत है, उन्हें तकनीकी आपदाओं के रूप में मानना अधिक सही है।
निष्कर्ष
यह सर्वविदित है कि किसी भी समस्या को सबसे प्रभावी रूप से रोका जाता है, और इसके परिणामों से नहीं। मौजूदा अराजक यातायात को देखते हुए, सिद्धांत में कुछ भी गारंटी नहीं दी जा सकती है (अब स्टीयरिंग व्हील दाईं ओर है और आप बस स्टॉप पर जा रहे हैं, और ऐसा कुछ भी नहीं है जो इसे रोक सके)। इसके अलावा, दुनिया में हर साल 1 लाख 350 हजार लोग आकस्मिक दुर्घटनाओं में भी नहीं मरते हैं, लेकिन दुर्घटनाओं में, जिनमें से सभी प्रतिभागियों ने बहुत ही अंतिम क्षण तक, इन दुर्घटनाओं से बचने के लिए हर तरह से प्रयास किया, लेकिन नहीं कर पाए। लेकिन जैसा कि प्रायोगिक रूप से ऊपर साबित हुआ था, ITS SPRUT प्रणाली के "मूर्ख के खिलाफ सुरक्षा" की अवधारणा सुरक्षा की गारंटी दे सकती है, यहां तक कि जानबूझकर दुर्घटनाओं से भी बच सकती है। इसके अलावा, ITS SPRUT सिस्टम के लिए अतिरिक्त धन आवश्यक नहीं है! यह सिर्फ इतना है कि CTP + CASCO द्वारा एकत्रित धन को लोगों और कारों के अंतिम संस्कार पर खर्च नहीं किया जाना चाहिए, जैसा कि अब है, लेकिन इस तथ्य पर कि कोई दुर्घटनाएं नहीं हैं।
पुनश्च: चूंकि ITS SPRUT की सभी क्षमताओं को प्रयोगात्मक रूप से सिद्ध किया गया है, "यह असंभव है, क्योंकि यह असंभव है," की भावना में बयान नहीं है। तदनुसार, यदि "फ्लैट अर्थ" के आपके कुछ सुंदर और लाभदायक सिद्धांत वास्तविकता के अनुरूप नहीं हैं, तो कुछ भी नहीं करना है, आपको इन पुराने सिद्धांतों को बदलना होगा। कृपया ध्यान दें कि "हर कोई जानता है कि 100% नहीं होता है, और लोहे पानी में डूब जाता है," लोहे से बने जहाज खूबसूरती से तैरते हैं, इसे नवाचार कहा जाता है। 100% के बारे में बोलते हुए, मैं जानबूझकर विशेषज्ञों के लिए कार्य को सरल बनाने की कोशिश करता हूं, क्योंकि यह साबित करने के लिए कि 100% नहीं है कि यह सिर्फ एक काउंटरएक्सप्ले देने के लिए पर्याप्त है। लेकिन नौ साल तक, और बीस से अधिक "परीक्षाओं" में, ऐसा एक भी उदाहरण प्रस्तुत नहीं किया गया है।
जारी रखने के लिए ...