
रोबोटिक्स की दुनिया में, एक सॉफ्टवेयर फ्रेमवर्क लंबे समय से विकसित हो रहा है और सफलतापूर्वक यह आपको रोबोट रोबोट सिस्टम - रोबोट ऑपरेटिंग सिस्टम (आरओएस) को जल्दी से प्रोटोटाइप करने की अनुमति देता है। हम Sberbank रोबोटिक्स प्रयोगशाला में सक्रिय रूप से अपनी परियोजनाओं के विकास में इसका उपयोग कर रहे हैं। कुछ अनुभव प्राप्त करने और यह देखते हुए कि रूस में आरओएस पर अभी तक एक भी व्यावहारिक बैठक नहीं हुई है, हमने इसे व्यवस्थित करने और अपने ज्ञान को साझा करने का फैसला किया, और साथ ही रोबोटिक्स समुदाय को जानने के लिए। ROS रूसी मीटअप 2019 को स्कोल्कोवो रोबोटिक्स 2019 फोरम के हिस्से के रूप में 16 अप्रैल को आयोजित किया जाएगा, यह आरओएस डेवलपर्स और सभी स्तरों के रोबोटिक्स के लिए एक दिन समुदाय के साथ अनुभव और संचार के लाइव आदान-प्रदान के लिए समर्पित करने का अवसर है। यदि आप आरओएस से परिचित हैं, तो आप सुरक्षित रूप से
पंजीकरण फॉर्म पर जा सकते हैं, कार्यक्रम और संगठनात्मक जानकारी भी वहां रखी गई है। बैठक में हम ROS के इतिहास और समुदाय के सिद्धांतों पर चर्चा करेंगे, हम SLAM और इनडोर लेजर लिडार नेविगेशन और एक रोबोट पथ योजनाकार पर व्यावहारिक रिपोर्टों के लिए बहुत समय समर्पित करेंगे। हम बताएंगे कि आरओएस के माध्यम से औद्योगिक मैनिपुलेटर्स को कैसे नियंत्रित किया जाए, सेंसर डेटा का उपयोग कैसे किया जाए, SMACH स्टेट मशीन के साथ कैसे काम किया जाए। और हम आपको बताएंगे कि बिना समस्याओं के ROS कैसे स्थापित करें और एक रोबोट विकसित करना शुरू करें।
वैसे, बैठक में भागीदारी नि: शुल्क है, लेकिन चूंकि सीटों की संख्या सीमित है, इसलिए हम आपसे पुष्टि के लिए प्रतीक्षा करने के लिए कहते हैं। और जो लोग आरओएस से परिचित नहीं हैं, उनके लिए हम एक छोटा सा अवलोकन प्रदान करते हैं।
 ROS की आंखों के माध्यम से दुनिया का दो-आयामी दृश्य
ROS की आंखों के माध्यम से दुनिया का दो-आयामी दृश्यरोबोट ऑपरेटिंग सिस्टम रोबोट के लिए एक सॉफ्टवेयर ढांचा है जो जटिल रोबोट के निर्माण के लिए बुनियादी एल्गोरिदम को लागू करता है। इसमें विभिन्न प्रकार के रोबोट प्लेटफार्मों पर जटिल और विश्वसनीय रोबोट व्यवहार बनाने के कार्य को सरल बनाने के लिए डिज़ाइन किए गए उपकरण, पुस्तकालय और मानकों का एक सेट शामिल है।
परियोजना की मुख्य विचारधारा खुले स्रोत, पैकेजों के प्रलेखन, कोड पुन: उपयोग और रोबोटिक्स के वैश्विक समुदाय के सिद्धांत हैं।
इसे क्यों बनाया गया
वास्तव में विश्वसनीय, सार्वभौमिक रोबोट सॉफ्टवेयर बनाना मुश्किल है। रोबोट की दृष्टि से, व्यक्ति को तुच्छ प्रतीत होने वाली समस्याओं के परिणामस्वरूप रोबोट सिस्टम की डेवलपर प्रोग्रामिंग की उच्च जटिलता होती है। इन कार्यों के साथ काम करना इतना मुश्किल है कि कभी-कभी उन्हें अकेले या किसी छोटी टीम में हल करना संभव नहीं है।
नतीजतन, आरओएस को रोबोटिक्स के लिए सहयोगी सॉफ्टवेयर विकास को प्रोत्साहित करने के लिए जमीन से बनाया गया था। उदाहरण के लिए, एक प्रयोगशाला में इनडोर SLAM विशेषज्ञ हो सकते हैं और एक विश्व स्तरीय SLAM प्रणाली की पेशकश कर सकते हैं। एक अन्य समूह में नेविगेशन के लिए SLAM का उपयोग करने में विशेषज्ञ हो सकते हैं, और एक अन्य समूह एक कंप्यूटर विज़न दृष्टिकोण विकसित कर सकता है जो एक गड़बड़ वातावरण में छोटी वस्तुओं को पहचानने के लिए अच्छी तरह से काम करता है। आरओएस को विशेष रूप से ऐसे समूहों के लिए डिज़ाइन किया गया था जो एक दूसरे के काम में सहयोग और निर्माण करते हैं।
लघु पृष्ठभूमि
ROS एक इतिहास और बड़ी संख्या में प्रतिभागियों के साथ एक बड़ी परियोजना है। रोबोटिक्स अनुसंधान समुदाय में कई लोगों द्वारा एक खुली सहयोग प्रणाली की आवश्यकता थी, और इस उद्देश्य के लिए कई परियोजनाएं बनाई गई थीं।
2000 के दशक के मध्य में, स्टैनफोर्ड विश्वविद्यालय ने रोबोटिक्स में AI के उपयोग से संबंधित विभिन्न प्रयास किए, उदाहरण के लिए, स्टैनफोर्ड AI रोबोट (STAIR) कार्यक्रम और रोबोटिक्स में उपयोग के लिए डिज़ाइन किए गए गतिशील सॉफ़्टवेयर के कस्टम प्रोटोटाइप बनाने के लिए व्यक्तिगत रोबोट (PR) कार्यक्रम। । 2007 में, विलो गैराज ने इन अवधारणाओं को आगे बढ़ाने और प्रोटोटाइप बनाने के लिए महत्वपूर्ण संसाधन प्रदान किए। प्रयासों को अनगिनत शोधकर्ताओं ने समर्थन दिया, जिन्होंने अपना समय और अनुभव दोनों को आरओएस के मूल विचारों और मुख्य सॉफ्टवेयर पैकेजों में योगदान करने के लिए साझा किया। सभी सॉफ्टवेयर बीएसडी ओपन सोर्स लाइसेंस का उपयोग करके विकसित किया गया था और धीरे-धीरे रोबोटिक्स शोधकर्ताओं के समुदाय में व्यापक रूप से इस्तेमाल किया जाने वाला मंच बन गया।
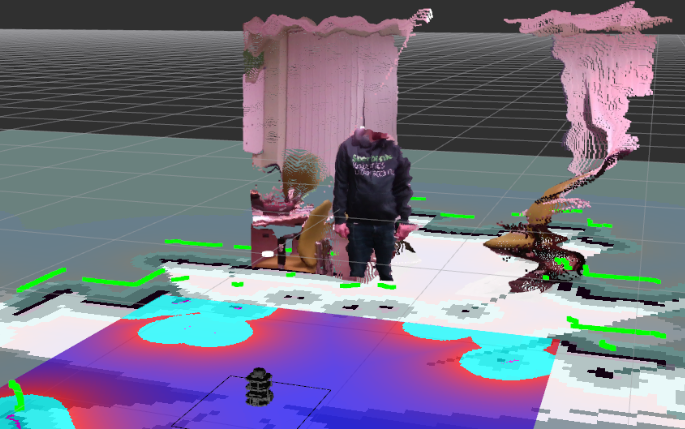 आरओएस की आंखों के माध्यम से तीन आयामी दुनिया का दृश्य
आरओएस की आंखों के माध्यम से तीन आयामी दुनिया का दृश्य
ग्लोबल आरओएस समुदाय
शुरुआत से ही, ROS को कई संस्थानों में और कई रोबोटों के लिए विकसित किया गया था, जिसमें कई संस्थान शामिल थे, जिन्होंने विलो गैराज से PR2 रोबोट प्राप्त किए थे। यद्यपि सभी प्रतिभागियों के लिए एक ही सर्वर पर अपने कोड को होस्ट करना बहुत आसान होगा, समय के साथ "फेडरेटेड" मॉडल ROS इकोसिस्टम की ताकत में से एक बन गया है। कोई भी समूह अपने स्वयं के सर्वर पर अपना ROS कोड रिपॉजिटरी चला सकता है, और वे इसे पूरी तरह से नियंत्रित करते हैं। उन्हें किसी की अनुमति की आवश्यकता नहीं है यदि वे अपनी रिपॉजिटरी को सार्वजनिक रूप से उपलब्ध कराने का निर्णय लेते हैं, तो वे उस समुदाय की मान्यता प्राप्त कर सकते हैं जो वे अपनी उपलब्धियों के लिए पात्र हैं और सभी ओपन सोर्स प्रोजेक्ट्स की तरह सुधार के लिए परीक्षकों और सुझावों से लाभान्वित होते हैं।
पिछले कुछ वर्षों में, ROS का विकास हुआ है और अब इसमें दुनिया भर के उपयोगकर्ताओं का एक बड़ा समुदाय शामिल है। ऐतिहासिक रूप से, अधिकांश उपयोगकर्ता अनुसंधान प्रयोगशालाओं में रहे हैं, लेकिन वे वाणिज्यिक क्षेत्र में, विशेष रूप से औद्योगिक और सेवा रोबोटिक्स में तेजी से दिखाई दे रहे हैं।
आरओएस समुदाय बहुत सक्रिय है और उसके पास प्रवचन के लिए 3,000 से अधिक सदस्य हैं। आरओएस सवालों के जवाब के लिए संयुक्त प्रलेखन विकी पर 8,000 से अधिक उपयोगकर्ता और साइट पर लगभग 22,500 उपयोगकर्ता हैं। विकिपीडिया में 22,000 से अधिक पृष्ठ हैं, और संपादन की गति लगभग 30 प्रति दिन है।
फिलहाल, रोस मेट्रिक्स रिपोर्ट 2018 के अनुसार रूसी बोलने वाले आरओएस उपयोगकर्ताओं की संख्या अन्य देशों के बीच 15 वें स्थान पर है। आइए मिलते हैं, चर्चा करते हैं और इसे ठीक करते हैं। आप अपनी परियोजनाओं के लिए ROS क्षमताओं के बारे में भी सीख सकते हैं, रोबोट विकसित करने की वास्तविक प्रथा के बारे में।
एक श्रोता के रूप में भाग लेने के लिए
फॉर्म भरें।
और यदि आपके पास समुदाय के लिए एक दिलचस्प संदेश है,
तो आप अभी भी
एक वक्ता बन सकते हैं ।
कार्यक्रम: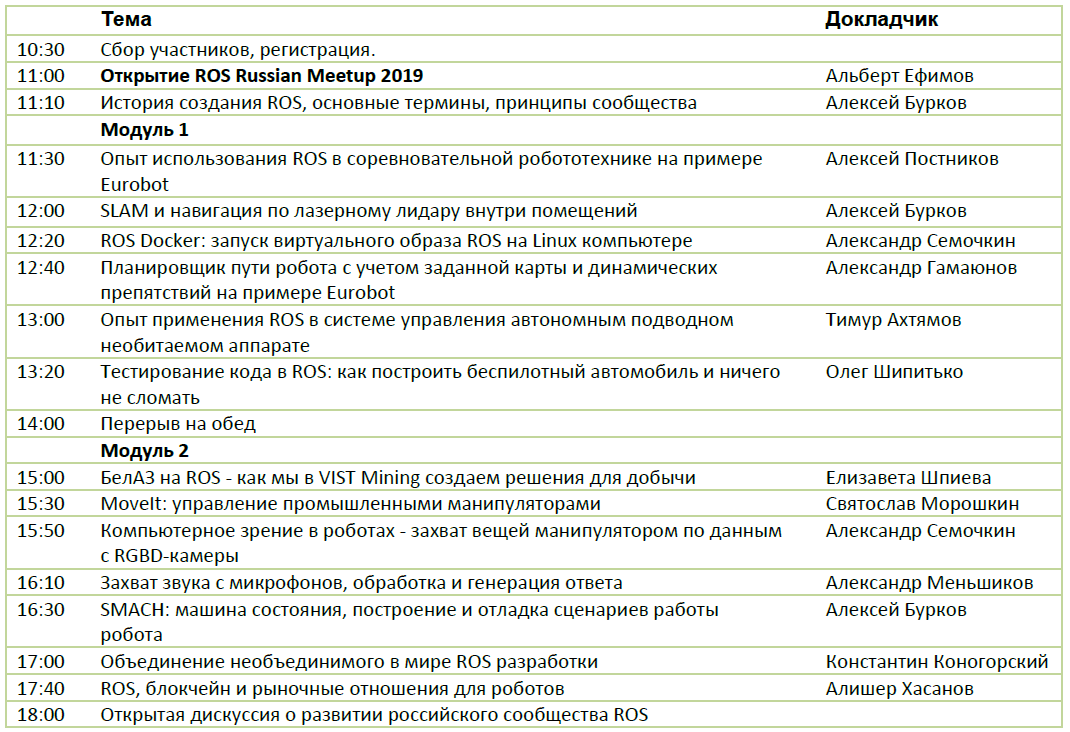
इस कार्यक्रम का आयोजन Sberbank Robotics Laboratory द्वारा किया गया है।