यदि आपने कभी भी एक रोबोट बांह या किसी रोबोट-जैसा तंत्र को तीन डिग्री से अधिक स्वतंत्रता के साथ नियंत्रित करने के लिए सॉफ्टवेयर लिखा है, तो आप जानते हैं कि अधिकांश समय आंदोलनों को स्वयं प्रोग्राम करने में लगता है। अब कल्पना करें कि आपने अपनी पसंद के अनुसार लिंक और ड्राइव को जोड़कर एक रोबोट बांह का निर्माण किया और सॉफ्टवेयर ने लिंक की लंबाई, उनके स्थान, रोटेशन कोण, और इसी तरह निर्धारित किया।
ठीक वैसा ही जैसा कोलंबिया के अनुसंधान शोधकर्ताओं ने किया था जब
उन्होंने सॉफ्टवेयर लिखा था जो यह
बताता है कि
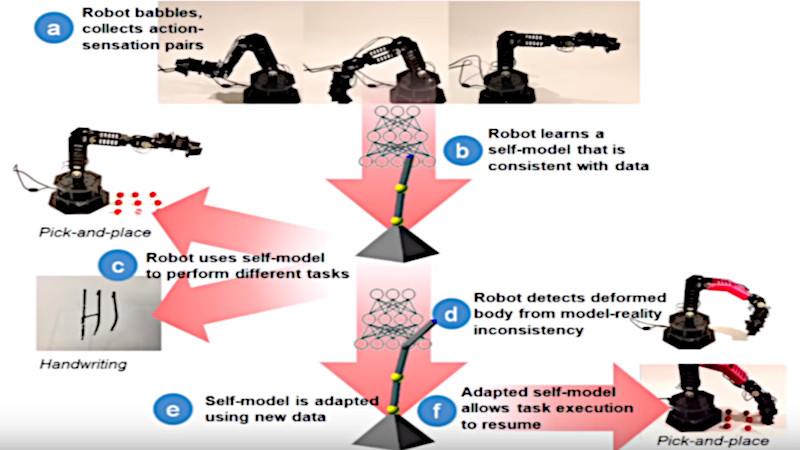
इसके द्वारा नियंत्रित रोबोटिक आर्म को कैसे स्थापित किया जाए , जिसमें भौतिकी, ज्यामिति या इंजनों की गतिशील विशेषताओं का कोई प्रारंभिक विचार नहीं है। पहले लॉन्च के तुरंत बाद, वह नहीं जानता कि रोबोट का क्या रूप है, इसके इंजन कैसे काम करते हैं, उनमें से प्रत्येक कैसे और क्या प्रभावित करता है। लगभग डेढ़ दिन के लिए, पहले सतर्क आंदोलनों में जो यादृच्छिक प्रतीत होते हैं, और जो हो रहा है, उसके बारे में प्रतिक्रिया प्राप्त कर रहा है, सॉफ्टवेयर इन-डेप्थ ट्रेनिंग का उपयोग करके इसमें निर्मित सिम्युलेटर को कॉन्फ़िगर करेगा ताकि वर्चुअल रोबोट यथासंभव भौतिक हो।
प्रोजेक्ट मैनेजर लिप्सन और उनके स्नातक छात्र रॉबर्ट क्विएकोव्स्की स्वतंत्रता के चार डिग्री के साथ एक व्यक्त रोबोट भुजा के साथ प्रयोग कर रहे हैं। सॉफ्टवेयर प्रशिक्षण की शुरुआत में, मॉडल गलत था, और लिंक करने के क्रम को परिभाषित नहीं किया गया था। 35 घंटे के प्रशिक्षण के बाद, मॉडल ने चार सेंटीमीटर से भी बदतर सटीकता के साथ वास्तविकता के अनुरूप किया। फिर, सॉफ़्टवेयर ने रॉबोरुक को वस्तुओं को लेने और स्थानांतरित करने के लिए मजबूर किया, जबकि प्रत्येक आंदोलन के बाद एक अतिरिक्त पुनर्गणना थी केवल स्वतंत्र प्रशिक्षण द्वारा गठित एक मॉडल के अनुसार।
यह निर्धारित करने के लिए कि क्या इस तरह के सॉफ्टवेयर रोबर आर्म को नुकसान का पता लगा सकते हैं, एक समान लेकिन विशेष रूप से विकृत एक हिस्से में से एक के स्थान पर मुद्रित किया गया था। सॉफ्टवेयर ने निर्धारित किया कि यह बदल गया था और मॉडल में उचित परिवर्तन किए थे। जल्द ही, इसने वस्तुओं को उठाने और स्थानांतरित करने के कार्यों को थोड़ा बदतर बना दिया।
चूंकि रोबोट के उपकरण के बारे में सॉफ़्टवेयर का आंतरिक विचार स्थिर नहीं है, इसलिए यह न केवल बेहतर और बेहतर कार्य करने की अनुमति देता है, बल्कि क्षति और संरचनात्मक परिवर्तनों के लिए भी अनुकूल है। इसके अलावा, सब कुछ भागों के क्रमिक पहनने और थोड़ा अलग आकार के साथ उनके प्रतिस्थापन के साथ काम करना जारी रखेगा।
बेशक, इस तरह के सॉफ्टवेयर द्वारा प्रबंधित एक रोबरुक बहुत जल्द ही
Dexter जितना सटीक नहीं हो जाएगा
, पारंपरिक सॉफ्टवेयर वाला एक रोबरुक जो 2018 हैकडे प्रतियोगिता में अपने डेवलपर्स को पुरस्कार के साथ प्रस्तुत करता है , लेकिन यह देखना दिलचस्प है कि यह कैसे काम करता है: