
यह ISS पर FEDOR रोबोट के लॉन्च से दो महीने पहले से थोड़ा अधिक है, और साइबर-कॉस्मोनॉट में इसके परिवर्तन की प्रक्रिया लगभग पूरी हो चुकी है।
इस प्रकाशन की निरंतरता में ।
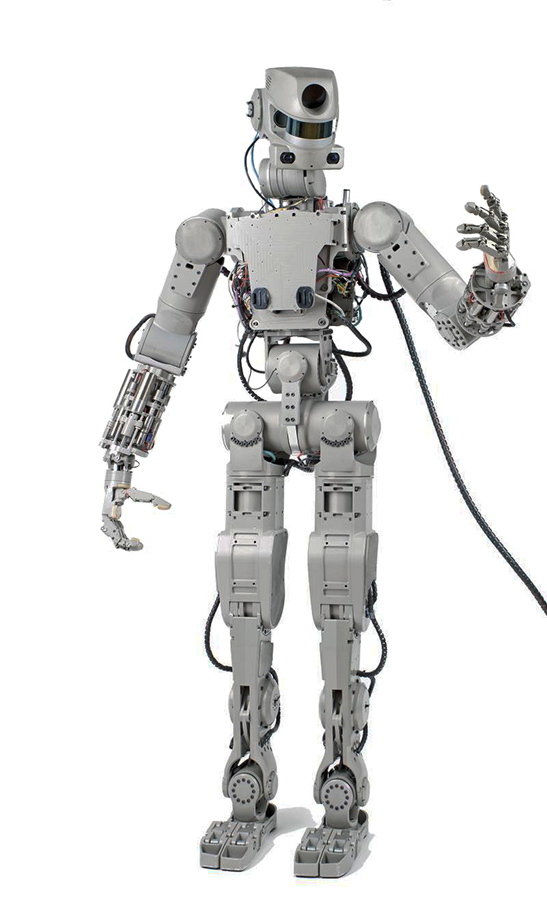
Fedor Robot या FEDOR (फाइनल एक्सपेरिमेंटल डिमॉन्स्ट्रेशन ऑब्जेक्ट रिसर्च) एक एन्थ्रोपोमोर्फिक रोबोट है जिसे Android Technique NGO और Advanced Research Foundation (FPI) द्वारा विकसित किया गया है, और इसे किसी व्यक्ति को उच्च-जोखिम वाले स्थानों पर प्रतिस्थापित करना चाहिए।
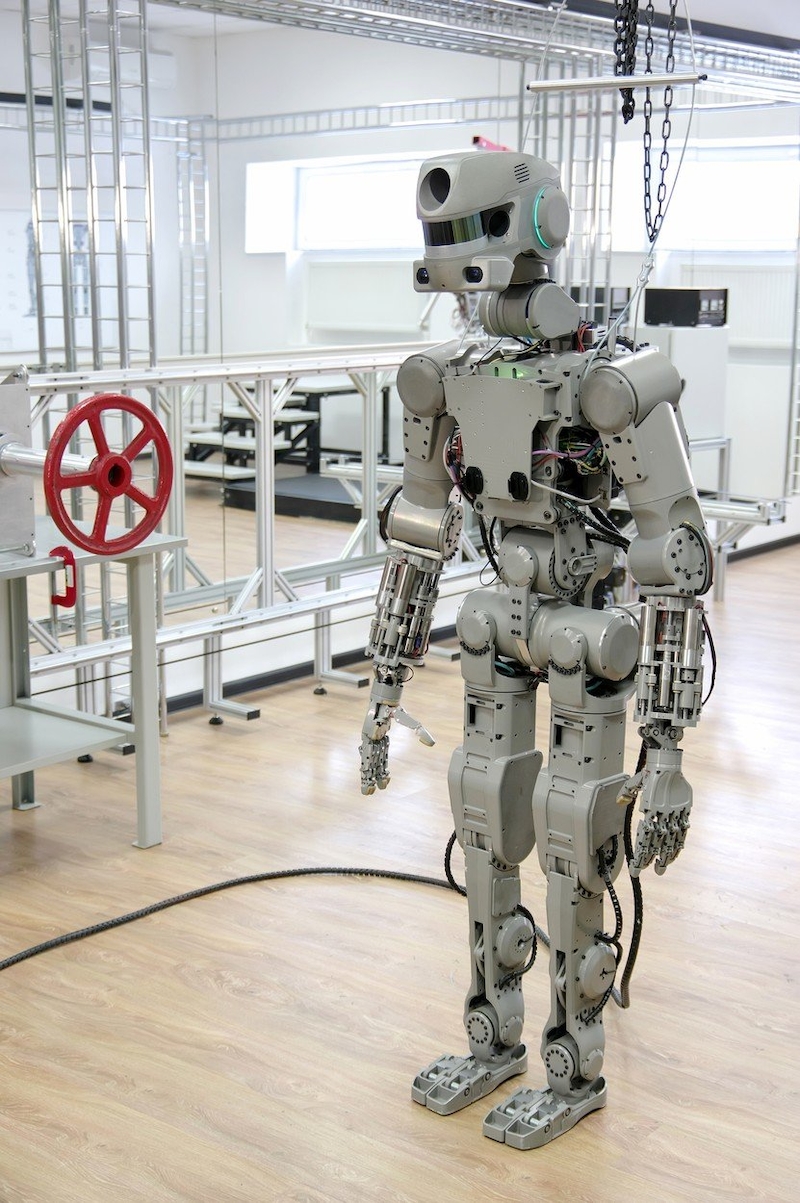 FEDOR रोबोट की विशेषताएं:
FEDOR रोबोट की विशेषताएं:- लगभग 190 सेमी लंबा;
- 160 किग्रा तक वजन (उपयोग किए गए मॉड्यूल के आधार पर);
- 13.5 kW (20 हॉर्स पॉवर) तक की शक्ति, बैटरी - बाहरी प्रकार के सैशेल या केबल पावर;
- 15 हजार भागों से युक्त;
- सॉफ्टवेयर: लिनक्स के आधार पर सेंट पीटर्सबर्ग में विकसित वास्तविक समय ऑपरेटिंग सिस्टम, सी ++, सी # और पायथन में नियंत्रण सॉफ्टवेयर;
- 1 घंटे तक ऑफ़लाइन काम;
- दो कैमरों, थर्मल इमेजर, माइक्रोफोन, जीपीएस, ग्लोनास, 15 रेंजफाइंडर प्रकार के लेजर और आपके शरीर की स्थिति निर्धारित करने के लिए एक विशेष प्रणाली से लैस;
- रोबोट के स्टीरियोस्कोपिक विजन सिस्टम के वीडियो चैनल संयुक्त रूप से और अलग-अलग दोनों काम कर सकते हैं (चैनलों का संयुक्त काम आपको वस्तुओं की दूरी निर्धारित करने की अनुमति देता है, और अलग-अलग - एक ही समय में कम से कम दो कार्यात्मक कार्यों को हल करने के लिए, उदाहरण के लिए, एक ही समय में दो नए उपकरण के साथ काम करने की क्रिया);
- ऑपरेटिंग मोड: स्टैंड-अलोन, कॉपी करना (ऑपरेटर के कार्यों को दोहराता है);
- रोबोट यांत्रिकी मानव शरीर के लगभग किसी भी आंदोलन को पुन: पेश कर सकता है, और सॉफ़्टवेयर, जिसमें भरपाई की गई लाइब्रेरी भी शामिल है, आपको रोबोट के पेशेवर कौशल का विस्तार करने की अनुमति देता है।
यह पता चला है कि रोस्कोसमोस में उन्होंने 22 अगस्त, 2019 को सोयूज एमएस मानवरहित वाहन पर एक साथ दो FEDOR रोबोट ISS को भेजने की योजना बनाई थी।
इस अंतरिक्ष परीक्षण परियोजना को साइबर क्रू कहा जाता था। हालाँकि, इस परियोजना का पूर्ण कार्यान्वयन अभी भी सवालों के घेरे में है।
समस्या यह है कि इस मामले में FEDOR रोबोट डिजाइन गणना के अनुसार गुजरता है न कि वैज्ञानिक उपकरणों के रूप में, जिन्हें कार्गो डिब्बे में रखा जा सकता है और आईएसएस पर चढ़ाया और इस्तेमाल किया जा सकता है, लेकिन एक पूर्ण मानव निर्मित निर्माण के रूप में जहाज के अंदर आम अंतरिक्ष यात्रियों की तरह रखने की जरूरत है। "यूनियन एमएस -14।"
चूंकि, सबसे पहले, आईएसएस पर अंतरिक्ष यात्रियों को इस तरह के एक जटिल उपकरण को इकट्ठा करने के लिए प्रशिक्षित नहीं किया जाता है, और पृथ्वी के निर्देशों के अनुसार, वे इसे इकट्ठा करने में सक्षम होंगे, लेकिन कीमती अंतरिक्ष समय इस पर खर्च किया जाएगा।
दूसरे, किसी भी मामले में "साइबर क्रू" की यह पहली परीक्षण उड़ान बहुत सारी समस्याओं और मुद्दों को प्रकट करना चाहिए जो वर्तमान परिचालन मोड में आईएसएस बोर्ड पर हल हो जाएंगे और इसे ध्यान में रखा जाएगा और आगे के मिशनों की वैज्ञानिक परियोजनाओं को समायोजित करने के लिए विश्लेषण किया जाएगा।
तो तुरंत अंतरिक्ष मानकों के लिए रोबोट संरचनात्मक तत्वों को अंतिम रूप देने की आवश्यकता थी।
FEDOR रोबोट के पहले संस्करण के बाद रोस्कोस्मोस और SP कोरोलेव रॉकेट और स्पेस कॉर्पोरेशन एनर्जिया (RSC Energia) को मानवयुक्त कार्यक्रमों में इसके उपयोग की संभावना का अध्ययन करने के लिए स्थानांतरित किया गया था, Roscosmos के अंतरिक्ष इंजीनियरों के पास नए कार्य थे - तैयार करने के लिए काफी कम समय में अंतरिक्ष मिशन के लिए FEDOR रोबोट।
एक मोबाइल रोबोट, कंट्रोल पैनल, इंटीग्रेशन टूल और ग्राउंड सेगमेंट: रोस्कॉस्मोस में स्थानांतरित कॉम्प्लेक्स में तत्व शामिल हैं।
अंतरिक्ष यात्रियों के लिए अंतरिक्ष की आवश्यकताएं:
 नागरिक के विपरीत, FEDOR रोबोट के अंतरिक्ष संस्करण में सुधार हुआ है:
नागरिक के विपरीत, FEDOR रोबोट के अंतरिक्ष संस्करण में सुधार हुआ है:- 105 किलो तक रोबोट का वजन कम;
- कंधे की कमर को कुछ सेंटीमीटर (हैच के व्यास के साथ निकासी को बढ़ाने के लिए, जो छह से सात सेंटीमीटर था, कम हो गया था और परीक्षणों में यह पता चला कि इसे हटाने के लिए असुविधाजनक था);
- अंतरिक्ष उड़ान सुरक्षा आवश्यकताओं को पूरा करने के लिए नियमित रूप से बैटरी बदली गई;
- नई ड्राइव स्थापित;
- रोबोट के डिजाइन का परीक्षण वाइब्रेटिंग स्टैंड पर किया जाता है।
फिलहाल, FEDOR-cosmonaut संस्करण के अनुकूलित रोबोट की सभी प्रणालियाँ परिचालन और उड़ान के लिए तैयार हैं।
लेकिन फेडोर रोबोट के लिए नियमित कुर्सी के पूरा होने के साथ, आरएससी एनर्जिया इंजीनियरों को टिंकर करना पड़ा।

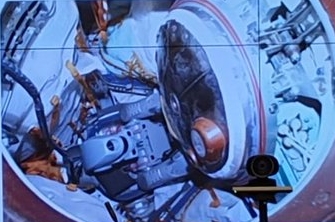
वर्तमान में, इस समस्या को हल कर दिया गया है, FEDOR अंतरिक्ष यात्री Soyuz MS-14 अंतरिक्ष यान में ISS के लिए उड़ान भरेगा जो अंतरिक्ष यात्री के नियमित लॉजमेंट में नहीं है (यह पता चला है कि यह रोबोट के लिए सबसे अनुकूल स्थिति में भी पर्याप्त नहीं है), लेकिन विशेष रूप से निर्मित "कुर्सी-फ्रेम" में एल्यूमीनियम मिश्र से, जो उड़ान के दौरान बाहरी प्रभावों से रोबोट के घटकों और तंत्र की रक्षा करेगा।
रोबोट के लिए "कुर्सी-फ्रेम" का पहला संस्करण इस तरह देखा गया:
ISS के साथ डॉकिंग के बाद, शून्य गुरुत्वाकर्षण में, अंतरिक्ष यात्रियों को रोबोट को अंतरिक्ष यान से ISS में बिना किसी अनुकूलन के स्थानांतरित करना होगा और इसके साथ काम करना जारी रखना होगा, इसलिए, रोस्कोस्मोस और आरएससी एनर्जिया में वे इस कार्य को यथासंभव सुविधाजनक बनाने और रोबोट के परिवहन समय को कम करने की कोशिश करते हैं, जैसे कि उतराई के चरण में। और भविष्य में जब अंतरिक्ष की स्थिति में परीक्षण किया गया।
सामान्य तौर पर, एन्थ्रोपोमोर्फिक रोबोट फेडोर अभी तक आईएसएस पर नहीं चढ़ा है, लेकिन पृथ्वी पर दोनों इंजीनियरों के लिए पहले से ही कई कार्य निर्धारित कर चुका है और कक्षीय परिसर में सवार अंतरिक्ष यात्री।
सोयुज एमएस -14 मानव रहित वाहन के साथ सोयूज -2.1 ए लॉन्च वाहन का प्रक्षेपण 22 अगस्त, 2019 के लिए निर्धारित है। अंतरिक्ष यान आईएसएस में लगभग डेढ़ सप्ताह तक रहेगा, और फिर स्वचालित रूप से पृथ्वी पर वापस आ जाएगा।
वैसे, इस परीक्षण उड़ान के ढांचे के भीतर, डिजिटल मिसाइल नियंत्रण प्रणाली की बातचीत और आपातकालीन बचाव प्रणाली के एनालॉग "स्टफिंग" का परीक्षण करने की योजना है। यदि कुछ गलत हो जाता है, तो रोबोट को अभी भी कार्यात्मक रहना चाहिए।
और आईएसएस अब क्रू को घुमा रहा है।
रूसी कॉस्मोनॉट ओलेग कोनोन्को, कनाडाई डेविड सेंट-जैक्स और अमेरिकी ऐनी मैकक्लेन आईएसएस से पृथ्वी पर लौट आएंगे। वे दिसंबर 2018 में स्टेशन पहुंचे।
आईएसएस और सोयूज के बीच संक्रमण हैट 24 जून को 23.10 मॉस्को समय पर बंद हो जाएगा। स्टेशन से 25 जून, 2019 को 2.25 पर अनडॉकिंग निर्धारित की गई है, जहाज के इंजन को कक्षा से नीचे लाने के लिए 4.54 पर शामिल किया गया है।
20 जुलाई, 2019 को सोसुज एमएस -13 अंतरिक्ष यान चालक दल पर आईएसएस भेजने की योजना है, जिसमें अलेक्जेंडर स्कोवर्त्सोव, एंड्रयू मॉर्गन और लुका पर्मिटानो शामिल हैं।
इस प्रकार, अलेक्सई ओविचिन (रूस), टायलर निकोलस हैग और क्रिस्टीना कोच (दोनों यूएसए से) और जुलाई के लॉन्च से नए तीन अंतरिक्ष यात्री आईएसएस में फेडोर रोबोट से मिलेंगे।
FEDOR अंतरिक्ष यात्री को तीन तरीकों से नियंत्रित किया जाता है: रेडियो, ऑप्टिकल फाइबर या साधारण इलेक्ट्रिक केबल के माध्यम से।
न केवल आईएसएस पर सवार अंतरिक्ष यात्री रोबोट को नियंत्रित करने में सक्षम होंगे, बल्कि पृथ्वी पर तकनीकी विशेषज्ञ, बाहरी संचार चैनल के माध्यम से रोबोट से जुड़ेंगे और रोबोट की आंखों के माध्यम से स्थिति को देखने के लिए 3 डी चश्मे के साथ एक विशेष "नियंत्रण" सूट का उपयोग करेंगे।
यह बहुत दिलचस्प है कि वैज्ञानिक कार्यों और प्रयोगों की योजना बनाई गई है और FEDOR रोबोट के साथ आईएसएस पर किया जाएगा।
हालांकि 2016 में वापस, यह कहा गया था कि FEDOR रोबोट बाहरी अंतरिक्ष में जाने, रखरखाव और अन्य निर्धारित कार्य करने में सक्षम होगा।
और आईएसएस पर रोबोट की विद्युत चुम्बकीय संगतता पर अतिरिक्त परीक्षण पूरा करने के बाद, संचार चैनल का परीक्षण किया जाएगा और FEDOR cosmonaut पृथ्वी से आने वाले आदेशों के एक सेट को निष्पादित करेगा।
