बड़े क्लाउड सिस्टम में, कंप्यूटिंग संसाधनों पर लोड को स्वचालित रूप से संतुलित या संतुलित करने का मुद्दा विशेष रूप से तीव्र है। टियोनिक्स ने इस मुद्दे का भी ख्याल रखा (क्लाउड सेवाओं के डेवलपर और ऑपरेटर, हम कंपनियों के रोस्टेलकॉम समूह का हिस्सा हैं)।
और, चूंकि हमारा मुख्य विकास मंच ओपनस्टैक है, और हम, सभी लोगों की तरह, आलसी हैं, इसलिए कुछ प्रकार के तैयार किए गए मॉड्यूल को चुनना तय किया गया था जो पहले से ही मंच का हिस्सा है। हमारी पसंद वॉकर पर गिर गई, जिसे हमने अपनी आवश्यकताओं के लिए उपयोग करने का निर्णय लिया।
पहले, आइए नियम और परिभाषाओं के साथ व्यवहार करें।
नियम और परिभाषाएँ
एक लक्ष्य एक मानव-पठनीय, अवलोकन योग्य और औसत दर्जे का अंतिम परिणाम है जिसे प्राप्त किया जाना चाहिए। प्रत्येक लक्ष्य को प्राप्त करने के लिए, एक या अधिक रणनीतियाँ होती हैं। एक रणनीति एक एल्गोरिथ्म का कार्यान्वयन है जो किसी दिए गए उद्देश्य के लिए एक समाधान खोजने में सक्षम है।
एक्शन एक प्राथमिक कार्य है जो एक ओपनस्टैक क्लस्टर के लक्षित प्रबंधित संसाधन की वर्तमान स्थिति को बदलता है, जैसे: एक वर्चुअल मशीन (माइग्रेशन) को स्थानांतरित करना, नोड की शक्ति (change_node_power_state) की स्थिति को बदलना, एक नोवा सेवा (change_nova_service_state) की स्थिति को बदलना, एक स्वाद (आकार बदलना)। , एक NOP संदेश (एनओपी), समय की एक निश्चित लंबाई के लिए कार्यों की अनुपस्थिति - ठहराव (नींद), डिस्क स्थानांतरण (आयतन_मिग्रेट)।
कार्य योजना (एक्शन प्लान) - एक विशिष्ट लक्ष्य के लिए एक विशिष्ट क्रम में किए गए कार्यों की एक विशिष्ट धारा। कार्य योजना में प्रदर्शन संकेतकों के एक सेट के साथ अनुमानित वैश्विक प्रदर्शन भी शामिल है। एक सफल ऑडिट के दौरान वॉकर द्वारा कार्य योजना तैयार की जाती है, जिसके परिणामस्वरूप उपयोग की गई रणनीति लक्ष्य को प्राप्त करने के लिए एक समाधान ढूंढती है। एक कार्य योजना में अनुक्रमिक क्रियाओं की एक सूची होती है।
ऑडिट क्लस्टर अनुकूलन के लिए एक अनुरोध है। किसी दिए गए क्लस्टर में एक लक्ष्य को प्राप्त करने के लिए अनुकूलन किया जाता है। प्रत्येक सफल ऑडिट के लिए, वॉचर एक कार्य योजना बनाता है।
ऑडिट स्कोप संसाधनों का एक समूह है जिसके भीतर एक ऑडिट किया जाता है (उपलब्धता क्षेत्र (एस), नोड एग्रीगेटर्स, व्यक्तिगत कंप्यूटिंग नोड्स या स्टोरेज नोड्स, आदि)। प्रत्येक टेम्पलेट में एक ऑडिट स्कोप परिभाषित किया गया है। यदि ऑडिट स्कोप निर्दिष्ट नहीं है, तो पूरे क्लस्टर का ऑडिट किया जाता है।
ऑडिट टेम्पलेट - ऑडिट शुरू करने के लिए सेटिंग्स का एक सहेजा गया सेट। कई बार एक ही सेटिंग्स के साथ ऑडिट चलाने के लिए टेम्प्लेट की आवश्यकता होती है। टेम्पलेट में ऑडिट का उद्देश्य होना चाहिए, यदि रणनीतियों को इंगित नहीं किया गया है, तो मौजूदा रणनीतियों में से सबसे उपयुक्त का चयन किया जाता है।
एक क्लस्टर भौतिक मशीनों का एक सेट है जो कंप्यूटिंग, भंडारण और नेटवर्क संसाधन प्रदान करता है और एक ही ओपनस्टैक नियंत्रण नोड द्वारा प्रबंधित किया जाता है।
क्लस्टर डेटा मॉडल (CDM) क्लस्टर-प्रबंधित संसाधनों की वर्तमान स्थिति और टोपोलॉजी का एक तार्किक प्रतिनिधित्व है।
दक्षता संकेतक (प्रभावकारिता संकेतक) - एक संकेतक जो इंगित करता है कि इस रणनीति का उपयोग करके बनाया गया समाधान कैसे लागू किया जाता है। प्रदर्शन संकेतक एक विशेष लक्ष्य के लिए विशिष्ट हैं और आमतौर पर एक अंतिम कार्य योजना की वैश्विक प्रभावशीलता की गणना करने के लिए उपयोग किया जाता है।
प्रभावोत्पादकता विशिष्टता प्रत्येक लक्ष्य से जुड़ी विशिष्ट विशेषताओं का एक समूह है, जो विभिन्न प्रदर्शन संकेतकों को परिभाषित करता है जो कि इसी लक्ष्य की उपलब्धि सुनिश्चित करने वाली रणनीति को अपने निर्णय में प्रदान करना चाहिए। दरअसल, रणनीति द्वारा प्रस्तावित प्रत्येक समाधान को इसकी वैश्विक प्रभावशीलता की गणना करने से पहले विनिर्देश के अनुपालन के लिए जाँच की जाएगी।
"स्कोरिंग इंजन" एक निष्पादन योग्य फ़ाइल है जिसमें स्पष्ट रूप से इनपुट डेटा, स्पष्ट रूप से परिभाषित आउटपुट डेटा परिभाषित किया गया है और एक विशुद्ध रूप से गणितीय कार्य करता है। इस प्रकार, गणना उस वातावरण पर निर्भर नहीं करती है जिसमें यह किया जाता है - यह कहीं भी एक ही परिणाम देगा।
वॉचर प्लानर , वॉचर निर्णय इंजन का हिस्सा है। यह मॉड्यूल रणनीति द्वारा उत्पन्न क्रियाओं के सेट को स्वीकार करता है और एक वर्कफ़्लो प्लान बनाता है जो परिभाषित करता है कि इन विभिन्न क्रियाओं को समय में कैसे नियोजित किया जाए और प्रत्येक क्रिया के लिए, पूर्वापेक्षाएँ क्या हैं।
चौकीदार लक्ष्य और रणनीतियाँ
डमी लक्ष्य - एक आरक्षित लक्ष्य जिसका उपयोग परीक्षण उद्देश्यों के लिए किया जाता है।
संबंधित रणनीतियाँ: डमी रणनीति, डमी रणनीति नमूना स्कोरिंग इंजन और डमी रणनीति का उपयोग आकार बदलने के साथ। डमी रणनीति एक डमी रणनीति है जिसका उपयोग टेम्पेस्ट के माध्यम से एकीकरण परीक्षण के लिए किया जाता है। यह रणनीति कोई उपयोगी अनुकूलन प्रदान नहीं करती है, इसका एकमात्र उद्देश्य टेम्पेस्ट परीक्षणों का उपयोग करना है।
नमूना स्कोरिंग इंजन का उपयोग करने वाली डमी रणनीति - रणनीति पिछले एक के समान है, यह केवल "मूल्यांकन इंजन" नमूने के उपयोग में भिन्न होती है, जो मशीन सीखने के तरीकों का उपयोग करके गणना आयोजित करती है।
आकार बदलने के साथ डमी रणनीति - रणनीति पिछले एक के समान है, यह केवल स्वाद बदलने के उपयोग में भिन्न होती है (प्रवास और निवास)।
उत्पादन में उपयोग नहीं किया गया।
ऊर्जा की बचत - ऊर्जा की खपत को कम करना। इस लक्ष्य के लिए रणनीति वीएम वर्कलोड समेकन रणनीति (सर्वर समेकन) के साथ संयोजन के रूप में ऊर्जा की बचत गतिशील पावर प्रबंधन (डीपीएम) फ़ंक्शन करने में सक्षम है, जो कम संसाधन लोड की अवधि के दौरान भी वर्कलोड को गतिशील रूप से समेकित करके ऊर्जा की बचत करती है, वर्चुअल मशीन को कम नोड्स में स्थानांतरित किया जाता है। , और अनावश्यक नोड्स काट दिया जाता है। समेकन के बाद, रणनीति दिए गए मापदंडों के अनुसार नोड्स को चालू / बंद करने का निर्णय प्रदान करती है: "min_free_hosts_num" - लोड की प्रतीक्षा कर रहे नि: शुल्क शामिल नोड्स, और "free_used_ncentcent" - मशीनों द्वारा कब्जाए गए नोड्स की संख्या के लिए निशुल्क शामिल नोड्स का प्रतिशत।
काम करने की रणनीति के
लिए, विडंबना को
चालू करना चाहिए
और नोड्स पर / बंद शक्ति के साथ काम करने के लिए कॉन्फ़िगर किया जाना चाहिए
।रणनीति विकल्प
क्लाउड में कम से कम दो नोड्स होने चाहिए। उपयोग की गई विधि नोड की शक्ति स्थिति बदल रही है (change_node_power_state)।
रणनीति में मैट्रिक्स के संग्रह की आवश्यकता नहीं होती है।सर्वर समेकन - गणना नोड्स (समेकन) की संख्या को कम करें। इसकी दो रणनीतियाँ हैं: मूल ऑफ़लाइन सर्वर समेकन और VM कार्यभार समेकन रणनीति।
मूल ऑफ़लाइन सर्वर समेकन रणनीति उपयोग किए गए सर्वरों की कुल संख्या को कम करती है और पलायन की संख्या को भी कम करती है।
मूल रणनीति के लिए निम्नलिखित मीट्रिक की आवश्यकता होती है:
रणनीति पैरामीटर: mig_attempts - मेट्रिक डेटा स्रोत (डिफ़ॉल्ट रूप से 700) से स्थैतिक एकत्रीकरण प्राप्त करने के लिए संभावित शटडाउन उम्मीदवारों (डिफ़ॉल्ट, 0, कोई प्रतिबंध), अवधि - समय अंतराल की खोज के लिए संयोजनों की संख्या।
उपयोग की जाने वाली विधियाँ: माइग्रेशन, नोवा सर्विस स्टेट चेंज (change_nova_service_state)।
वीएम वर्कलोड कंसोलिडेशन स्ट्रेटेजी पहले-फिट हेयोरिस्टिक एल्गोरिदम पर आधारित है, जो मापा सीपीयू लोड पर केंद्रित है और नोड्स को कम करने की कोशिश करता है जिसमें बहुत अधिक या बहुत कम लोड होता है, जो खाते की संसाधन क्षमता सीमाओं को ध्यान में रखते हैं। यह रणनीति एक समाधान प्रदान करती है जो निम्नलिखित चार चरणों का उपयोग करके क्लस्टर संसाधनों का अधिक कुशल उपयोग करती है:
- अनलोडिंग चरण - अति उपयोग किए गए संसाधनों का प्रसंस्करण;
- समेकन चरण - अविकसित संसाधनों का प्रसंस्करण;
- समाधान अनुकूलन - पलायन की संख्या को कम करना;
- अप्रयुक्त कम्प्यूट नोड्स को अक्षम करना।
रणनीति के लिए निम्नलिखित मीट्रिक की आवश्यकता होती है:
निम्नलिखित मैट्रिक्स वैकल्पिक हैं, लेकिन उपलब्ध होने पर रणनीति सटीकता में सुधार करें:
रणनीति पैरामीटर: अवधि - मीट्रिक डेटा स्रोत (डिफ़ॉल्ट रूप से 3600) से स्थैतिक एकत्रीकरण प्राप्त करने के लिए सेकंड में समय अंतराल।
पिछली रणनीति के समान विधियों का उपयोग करता है। अधिक जानकारी
यहाँ ।
वर्कलोड बैलेंसिंग - गणना नोड्स के बीच वर्कलोड। लक्ष्य की तीन रणनीतियाँ हैं: वर्कलोड बैलेंस माइग्रेशन स्ट्रेटेजी, वर्कलोड स्टैबलाइजेशन, स्टोरेज कैपेसिटी बैलेंस स्ट्रेटेजी।
वर्कलोड बैलेंस माइग्रेशन रणनीति मेजबान वर्चुअल मशीनों के वर्कलोड के आधार पर वर्चुअल मशीन माइग्रेशन लॉन्च करती है। स्थानांतरण का निर्णय तब किया जाता है जब नोड का सीपीयू या रैम का उपयोग निर्दिष्ट सीमा से अधिक हो। इस स्थिति में, स्थानांतरित वर्चुअल मशीन को नोड को सभी नोड्स के औसत कार्यभार के करीब लाना चाहिए।
आवश्यकताओं
- भौतिक प्रोसेसर का उपयोग;
- कम से कम दो भौतिक कंप्यूटिंग नोड्स;
- स्थापित और कॉन्फ़िगर किया गया Ceilometer घटक प्रत्येक कंप्यूटिंग नोड और Ceilometer API पर काम करने वाला Ceilometer-agent-compute है, साथ ही साथ निम्नलिखित मैट्रिक्स भी एकत्रित करता है:
रणनीति विकल्प:
उपयोग की गई विधि प्रवास है।
वर्कलोड स्थिरीकरण - एक रणनीति जिसका उद्देश्य लाइव माइग्रेशन का उपयोग करके कार्यभार को स्थिर करना है। रणनीति मानक विचलन एल्गोरिथ्म पर आधारित है और यह निर्धारित करती है कि क्या क्लस्टर में भीड़ है और क्लस्टर को स्थिर करने के लिए मशीन माइग्रेशन को ट्रिगर करके इसका जवाब देता है।
आवश्यकताओं
- भौतिक प्रोसेसर का उपयोग;
- कम से कम दो भौतिक कंप्यूटिंग नोड्स;
- स्थापित और कॉन्फ़िगर किया गया Ceilometer घटक प्रत्येक कंप्यूटिंग नोड और Ceilometer API पर काम करने वाला Ceilometer-agent-compute है, साथ ही साथ निम्नलिखित मैट्रिक्स भी एकत्रित करता है:
स्टोरेज कैपेसिटी बैलेंस स्ट्रेटेजी (क्वींस के बाद से लागू की गई रणनीति) - सिंडर पूल के भार के आधार पर रणनीति ट्रांसफर होती है। जब भी पूल उपयोग निर्दिष्ट सीमा से अधिक हो, तो स्थानांतरण निर्णय किया जाता है। रोमिंग डिस्क को पूल को सभी सिंडर पूल के औसत लोड के करीब लाना चाहिए।
आवश्यकताएँ और सीमाएँ
- कम से कम दो सिंडर पूल;
- डिस्क को विस्थापित करने की क्षमता।
- क्लस्टर डेटा मॉडल कलेक्टर।
रणनीति विकल्प:
उपयोग की गई विधि डिस्क माइग्रेशन (वॉल्यूम_मिग्रेट) है।
शोर पड़ोसी - "शोर पड़ोसी" की पहचान करें और माइग्रेट करें - एक कम प्राथमिकता वाली वर्चुअल मशीन जो कि IPC बिंदु से उच्च प्राथमिकता वाली वर्चुअल मशीन के प्रदर्शन को अंतिम स्तर के कैश से अधिक प्रभावित करती है। स्वयं की रणनीति: शोर पड़ोसी (प्रयुक्त रणनीति पैरामीटर cache_threshold है (डिफ़ॉल्ट मान 35 है), माइग्रेशन तब शुरू होता है जब प्रदर्शन निर्दिष्ट मान पर गिर जाता है। कार्य करने की रणनीति के लिए, शामिल
LLC (अंतिम स्तर कैश) मैट्रिक्स, CMT समर्थन के साथ नवीनतम सर्वर , और भी शामिल है। निम्नलिखित मैट्रिक्स का संग्रह:
क्लस्टर डेटा मॉडल (डिफ़ॉल्ट): नोवा क्लस्टर डेटा मॉडल कलेक्टर। लागू विधि प्रवास है।
डैशबोर्ड के माध्यम से इस उद्देश्य के लिए काम क्वींस में पूरी तरह से लागू नहीं किया गया है।
थर्मल अनुकूलन - तापमान की स्थिति का अनुकूलन। आउटलेट का तापमान (निकास हवा) सर्वर के थर्मल / कार्यभार की स्थिति को मापने के लिए महत्वपूर्ण थर्मल टेलीमेटरी सिस्टम में से एक है। उद्देश्य के लिए, एक रणनीति है - आउटलेट तापमान आधारित रणनीति, जो अनुकूल तापमान परिस्थितियों (बाहर निकलने पर सबसे कम तापमान) के साथ नोड्स पर कार्यभार स्थानांतरित करने पर निर्णय लेती है जब मूल मेजबानों के उत्पादन में तापमान एक कस्टम सीमा तक पहुंच जाता है।
कार्य करने की रणनीति के लिए, आपको Intel Power Node Manager
3.0 या बाद के संस्करण के साथ एक सर्वर की आवश्यकता होती है, साथ ही साथ निम्नलिखित मैट्रिक्स को एकत्रित करना होता है:
रणनीति विकल्प:
उपयोग की गई विधि प्रवास है।
एयरफ्लो ऑप्टिमाइज़ेशन - वेंटिलेशन मोड का अनुकूलन। खुद की रणनीति - लाइव माइग्रेशन का उपयोग करते हुए यूनिफॉर्म एयरफ्लो। जब भी सर्वर पंखे से एयरफ्लो निर्दिष्ट सीमा से अधिक हो जाता है, तो वर्चुअल मशीन के माइग्रेशन की रणनीति शुरू हो जाती है।
काम करने के लिए, रणनीति की आवश्यकता है:
- हार्डवेयर: कंप्यूटिंग नोड्स <NodeManager 3.0 समर्थन के साथ;
- कम से कम दो कम्प्यूट नोड्स;
- प्रत्येक कंप्यूटिंग नोड पर स्थापित और कॉन्फ़िगर किए गए छत-एजेंट-कम्प्यूट और Ceilometer एपीआई घटक सफलतापूर्वक वायु प्रवाह, सिस्टम पावर और इनलेट तापमान जैसे मैट्रिक्स की रिपोर्ट कर सकते हैं:
काम करने की रणनीति के लिए, आपको इंटेल पावर नोड प्रबंधक 3.0 के साथ एक सर्वर की आवश्यकता है या बाद में स्थापित और कॉन्फ़िगर किया गया है।
सीमाएँ: अवधारणा उत्पादन के लिए अभिप्रेत नहीं है।
निरंतर एल्गोरिदम के साथ इस एल्गोरिथ्म का उपयोग करने का प्रस्ताव है, क्योंकि केवल एक आभासी मशीन को प्रति चलना माइग्रेट करने की योजना है।
लाइव पलायन संभव है।
रणनीति विकल्प:
उपयोग की गई विधि प्रवास है।
हार्डवेयर रखरखाव - हार्डवेयर रखरखाव। इस लक्ष्य से संबंधित एक रणनीति है ज़ोन माइग्रेशन। रणनीति आभासी मशीनों के कुशल स्वचालित और न्यूनतम प्रवासन और हार्डवेयर रखरखाव के मामले में डिस्क के लिए एक उपकरण है। रणनीति वजन के अनुसार एक कार्य योजना बनाती है: ऐसे कार्यों का एक सेट जिसमें अधिक वजन होता है, दूसरों की तुलना में आगे की योजना बनाई जाएगी। दो कॉन्फ़िगरेशन विकल्प हैं: एक्शन वेट (एक्शन_वीइट्स) और समानांतरकरण।
सीमाएं: कार्यों के भार और समांतरिकरण को समायोजित करना आवश्यक है।
रणनीति विकल्प:
गणना नोड्स की एक सरणी के तत्व:
भंडारण नोड्स की एक सरणी के तत्व:
प्राथमिकता वाली वस्तुओं के तत्व:
प्रयुक्त विधियाँ - आभासी मशीनों का प्रवास, डिस्क का प्रवास।
अवर्गीकृत एक सहायक लक्ष्य है जिसका उपयोग किसी रणनीति के विकास को सुविधाजनक बनाने के लिए किया जाता है। इसमें विनिर्देश शामिल नहीं हैं और इसका उपयोग तब भी किया जा सकता है जब रणनीति अभी तक किसी मौजूदा लक्ष्य से जुड़ी नहीं है। इस लक्ष्य का उपयोग संक्रमणकालीन अवस्था के रूप में भी किया जा सकता है। एक संबंधित रणनीति एक्ट्यूएटर है।
एक नया लक्ष्य बनाएं
वॉकर डिसीजन इंजन में एक "बाहरी लक्ष्य" प्लगइन इंटरफ़ेस है जो आपको एक बाहरी लक्ष्य को एकीकृत करने की अनुमति देता है जिसे रणनीति का उपयोग करके प्राप्त किया जा सकता है।
एक नया लक्ष्य बनाने से पहले, आपको यह सुनिश्चित करना चाहिए कि मौजूदा लक्ष्यों में से कोई भी आपकी आवश्यकताओं को पूरा नहीं करता है।
एक नया प्लगइन बनाएँ
एक नया लक्ष्य बनाने के लिए, आपको चाहिए: लक्ष्य वर्ग का विस्तार करें, नए लक्ष्य के लिए एक विशिष्ट पहचानकर्ता को वापस
लाने के लिए
get_name () वर्ग विधि लागू करें जिसे आप बनाना चाहते हैं। इस विशिष्ट पहचानकर्ता को उस प्रविष्टि बिंदु के नाम से मेल खाना चाहिए जिसे आप बाद में घोषित करते हैं।
इसके बाद, आपको जिस विधि को बनाना चाहते हैं उसका अनुवादित प्रदर्शन नाम वापस करने के लिए आपको
get_display_name () वर्ग विधि को लागू करने की आवश्यकता है
( अनुवादित स्ट्रिंग को वापस करने के लिए चर का उपयोग न करें ताकि यह स्वचालित रूप से अनुवाद उपकरण द्वारा एकत्र किया जा सके।)।
अपने नए लक्ष्य की अनुवाद कुंजी (वास्तव में अंग्रेजी प्रदर्शन नाम) को वापस करने के लिए वर्ग विधि
get_translatable_display_name () लागू करें। वापसी मान get_display_name () में अनुवादित स्ट्रिंग से मेल खाना चाहिए।
अपने उद्देश्य के लिए प्रदर्शन विनिर्देश को वापस करने के लिए इसके
get_efficacy_specification () विधि को लागू करें। Get_efficacy_specification () विधि वॉकर द्वारा प्रदान की गई अवर्गीकृत () उदाहरण देता है। यह प्रदर्शन विनिर्देश आपके लक्ष्य को विकसित करने की प्रक्रिया में उपयोगी है क्योंकि यह खाली विनिर्देश को पूरा करता है।
→
यहाँ अधिक जानकारीवास्तुकला चौकीदार (अधिक जानकारी
यहाँ )।
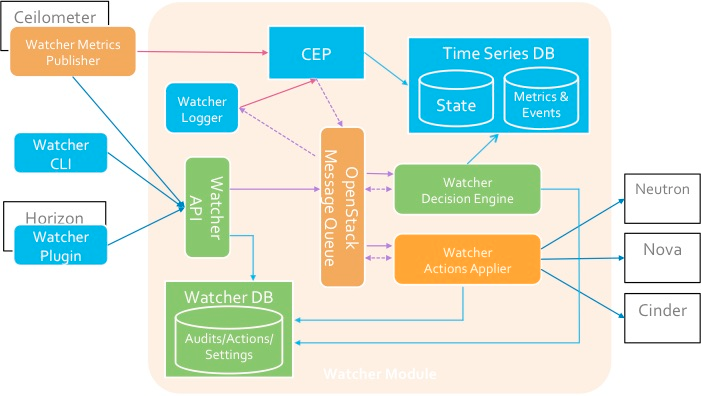
घटकों
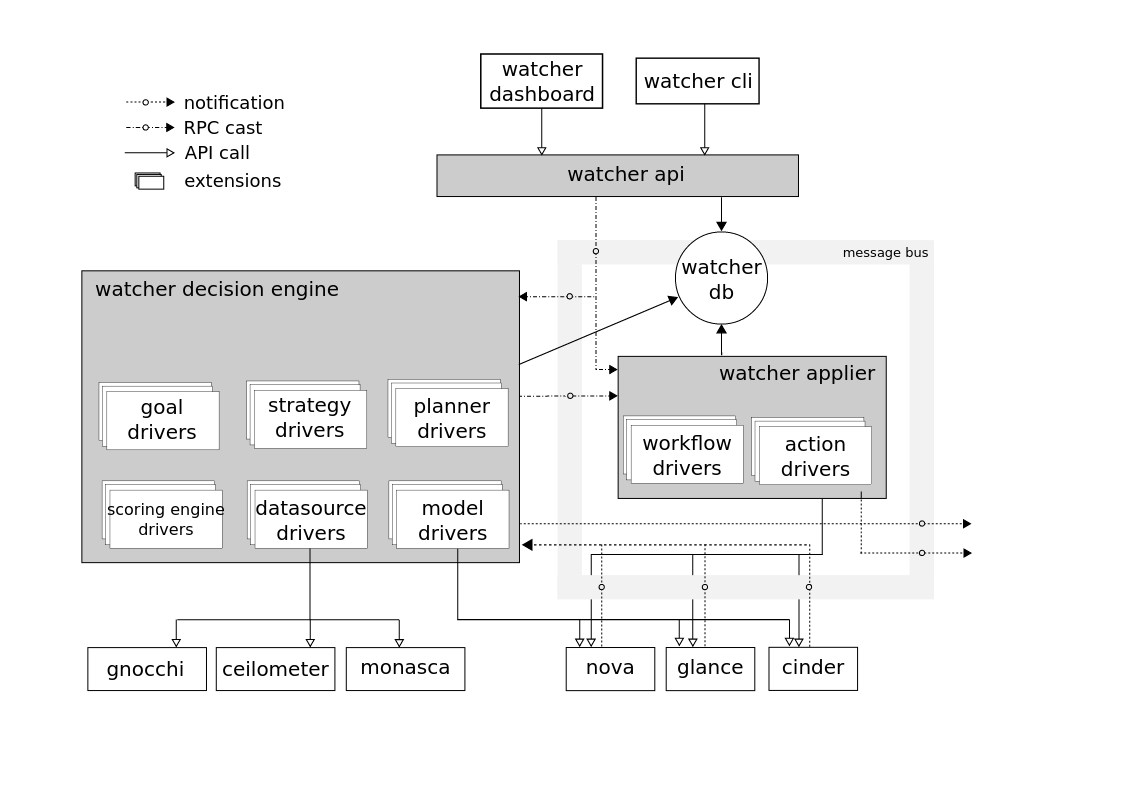 वॉचर एपीआई
वॉचर एपीआई - एक घटक जो वॉचर द्वारा प्रदान की गई रीस्ट एपीआई को लागू करता है। इंटरेक्शन तंत्र: सीएलआई, क्षितिज प्लगइन, पायथन एसडीके।
वॉचर डीबी - वॉचर डेटाबेस।
वॉचर एप्लायर - एक घटक जो घटक वॉकर निर्णय इंजन द्वारा बनाई गई कार्य योजना के कार्यान्वयन को लागू करता है।वॉकर डिसीजन इंजन एक घटक है जो ऑडिट लक्ष्य को पूरा करने के लिए संभावित अनुकूलन क्रियाओं के एक सेट की गणना के लिए जिम्मेदार है। यदि कोई रणनीति निर्दिष्ट नहीं है, तो घटक स्वतंत्र रूप से सबसे उपयुक्त का चयन करता है।वॉचर मेट्रिक्स प्रकाशक एक घटक है जो कुछ मैट्रिक्स या घटनाओं को एकत्र करता है और उनकी गणना करता है और उन्हें CEP समापन बिंदु पर प्रकाशित करता है। फ़ीचर कार्यक्षमता भी Ceilometer प्रकाशक द्वारा प्रदान की जा सकती है।जटिल घटना प्रसंस्करण (सीईपी) इंजन- जटिल इवेंट प्रोसेसिंग के लिए इंजन। प्रदर्शन कारणों के लिए, सीईपी इंजन के एक ही समय में चलने के कई उदाहरण हो सकते हैं, जिनमें से प्रत्येक एक विशिष्ट प्रकार के मीट्रिक या ईवेंट को संभालता है। वॉचर प्रणाली में, सीईपी दो प्रकार के कार्यों का शुभारंभ करता है: - समय श्रृंखला डेटाबेस के लिए इसी घटनाओं / मीट्रिक लिखें; - जब यह घटना वर्तमान अनुकूलन रणनीति के परिणाम को प्रभावित कर सकती है, तब वॉचर डिसीजन इंजन घटक के लिए प्रासंगिक ईवेंट भेजें, क्योंकि ओपनस्टैक क्लस्टर एक स्थिर प्रणाली नहीं है।घटकों की परस्पर क्रिया AMQP प्रोटोकॉल के अनुसार की जाती है।→ वॉचिंग कॉन्फ़िगर करनाचौकीदार के साथ बातचीत की योजना

चौकीदार परीक्षा परिणाम
- Optimization — Action plans 500 ( Queens, ), , , .
- Action details , ( Queens, ).
- Dummy () , .
- Unclassified , .
- Workload Balancing ( Storage Capacity balance) , . .
- Workload Balancing ( Workload Balance Migration Strategy) , .
- Workload Balancing ( Workload Stabilization Strategy) .
- Noisy Neighbor , .
- Hardware maintenance , ( , ).
- nova.conf ( default compute_monitors = cpu.virt_driver) .
- Server Consolidation ( Basic) .
- Server Consolidation ( VM workload consolidation) . . , , .
- Watcher ( — Optimization, - ):
[watcher_strategies.basic]
datasource = ceilometer, gnocchi - Saving Energy . , - Ironic, baremetal service.
- Thermal Optimization . , Server Consolidation ( VM workload consolidation) ( )
- एयरफ्लो ऑप्टिमाइज़ेशन के ऑडिट विफल हो जाते हैं।
निम्नलिखित ऑडिट पूरा करने की त्रुटियों का भी सामना करना पड़ता है। निर्णय-इंजन। लॉग में ट्रैसबैक (क्लस्टर स्थिति परिभाषित नहीं है)।→ यहाँ त्रुटि की चर्चानिष्कर्ष
हमारे दो महीने के अनुसंधान का नतीजा यह असंदिग्ध निष्कर्ष था कि पूर्ण-भारित, कार्य भार संतुलन प्रणाली प्राप्त करने के लिए, हमें ओपनस्टैक प्लेटफॉर्म के लिए उपकरणों को अंतिम रूप देने पर बारीकी से काम करना होगा।पहरेदार ने खुद को गंभीर और तेजी से विकसित करने वाला उत्पाद साबित कर दिया है, जिसमें भारी क्षमता है, जिसके पूर्ण उपयोग के लिए बहुत से गंभीर काम करने होंगे।लेकिन चक्र के अगले लेखों में इसके बारे में और अधिक।