श्रृंखला में पोस्ट:
8. हम फोन-आरओएस कंट्रोल, जीपीएस-नोड से नियंत्रित करते हैं7. रोबोट स्थानीयकरण: जीएमपी, एएमसीएल, कमरे के नक्शे पर संदर्भ बिंदु6. पहिया एनकोडर, कमरे के नक्शे, लिडार के साथ ओडोमेट्री5. हम rviz और gazebo में काम करते हैं: xacro, नए सेंसर।4. rviz और gazebo संपादकों का उपयोग करके एक रोबोट सिमुलेशन बनाएं।3. तेजी लाने, कैमरा बदलने, गेट को ठीक करें2. सॉफ्टवेयर1. लोहाएक छोटा रोबोट बनाने के बारे में लेखों की एक श्रृंखला की निरंतरता। इस बार हम सिमुलेशन में रोबोट की एक प्रति बनाने पर ध्यान केंद्रित करेंगे, जो दृश्य आरओएस वातावरण rviz और गज़ेबो (इसके बाद "संपादकों" के रूप में संदर्भित) द्वारा पेश किया जाता है। संपादकों में काम एक आभासी मशीन पर किया जाएगा, जिसकी छवि पहले डाउनलोड करने के लिए प्रदान की गई थी। जब से हम सिमुलेशन के बारे में बात कर रहे हैं, एक मॉडल का निर्माण कर रहे हैं, रोबोट कार्ट को खुद की आवश्यकता नहीं है।
श्रृंखला में पिछली पोस्ट:
1.
भाग 32.
भाग 23.
भाग 1मूल urdf फ़ाइलें बनाना
सामान्य तौर पर, एक रोबोट को सरलीकृत तरीके से बनाने की प्रक्रिया में आमतौर पर निम्नलिखित चरण होते हैं:
1. एक रोबोट मॉडल बनाना।
2. सिमुलेशन में मॉडल का परीक्षण करना।
3. एक वास्तविक रोबोट मॉडल बनाना।
4. एक वास्तविक मॉडल का परीक्षण।
आरओएस संपादकों के साथ काम करते समय, जो भवन निर्माण मॉडल और आभासी दुनिया में अपने परीक्षणों के लिए महान अवसर प्रदान करते हैं, हमें यह स्वीकार करना चाहिए कि वास्तविक रोबोट मॉडल हमेशा अपने शामिल भाइयों की तरह व्यवहार नहीं करते हैं। और यहां आभासी दुनिया में मॉडल के साथ काम करने का समय वास्तविक मॉडल को अंतिम रूप देने के लिए आवश्यक समय में जोड़ा जाता है।
समय का ऐसा उपहार, जैसा कि एक प्रसिद्ध व्यक्ति ने कहा, न केवल सब कुछ बर्दाश्त कर सकता है।
इस संबंध में, पिछले पदों में रोबोटिक्स का क्रम बाधित हो गया था: पहला, रोबोट का एक वास्तविक मॉडल बनाया गया था। अब हम इसके वर्चुअलाइजेशन के बारे में बात करेंगे, इसलिए बोलने के लिए।
Urdf बनाएं
गज़ेबो में सिमुलेशन का पूरी तरह से आनंद लेने और रोबोट का परीक्षण करने के लिए, आपको पहले रोबोट के लिए एक यूआरडीएफ फ़ाइल बनाना होगा।
यूआरडीएफ फ़ाइल विज़ुअलाइज़ेशन के क्षेत्र में एक प्रकार का कंकाल कंकाल है।
सीधे शब्दों में कहें, एक यूआरडीएफ फ़ाइल एक रोबोट का वर्णन करने वाली फ़ाइल है।
जैसा कि पहले कहा गया था, वीएमवेयर वर्कस्टेशन छवि का उपयोग करके काम किया जाएगा, जिस पर आरओएस (उबंटू 16.04, आरओएस-काइनेटिक) और दृश्य संपादक पहले से ही स्थापित हैं। इसलिए, इस प्रणाली में सभी क्रियाएं प्रजनन योग्य हैं।
एक rosbots_description नामक ROS पैकेज बनाएँ।
ऐसा करने के लिए, आपको catkin_ws / src के साथ फ़ोल्डर में प्रवेश करना होगा और ROS में पैकेज बनाने के लिए कमांड निष्पादित करना होगा:
roscd; cd ..; cd src; catkin_create_pkg rosbots_description rospy
* यदि roscd कमांड निष्पादित करते हैं; cd ..; सीडी src; यदि आप catkin_ws में नहीं आते हैं, तो हो सकता है कि आपके पास इस प्रकार के कई वातावरण हों। आवश्यक को सक्रिय करने के लिए, catkin_ws फ़ोल्डर पर जाएं और कमांड चलाएँ: source devel / setup.bash। खो जाने के लिए नहीं, यदि आप एक छवि के साथ काम कर रहे हैं, तो आप इस फ़ोल्डर को रूट से प्राप्त कर सकते हैं: सीडी ~; सीडी catkin_ws
यदि सब कुछ ठीक रहा, तो rosbots_description फ़ोल्डर बनाया जाएगा।
यह इतना मुश्किल और आसान नहीं है कि आप केवल catkin_ws / src में मैन्युअल रूप से एक फ़ोल्डर बनाएँ? और यह कैसी रस्साकसी है?
आप मैन्युअल रूप से एक फ़ोल्डर बना सकते हैं, लेकिन आपको मैन्युअल रूप से दो और फाइलें भी लिखनी होंगी जो ROS काम करता है: CMakeLists.txt और package.xml।
वे निर्माण के बाद फ़ोल्डर में मौजूद हैं:

उनका आरओएस अपने आप बनता है। जबकि हम उनकी सामग्री पर ध्यान नहीं देंगे।
आदेश के अंत में रस्सियों का अर्थ है निर्भरता पैदा करना, अजगर का समर्थन करना।
चल रहा है।
नए बनाए गए rosbots_description पैकेज के अंदर, urdf फ़ोल्डर बनाएं, और इसमें rosbots.xacro फ़ाइल।
roscd rosbots_description mkdir urdf; cd urdf; touch rosbots.xacro chmod +x rosbots.xacro
आरओएस सिस्टम की खूबी यह है कि सिस्टम के किस फोल्डर में आप स्थित नहीं होंगे, आप तुरंत लाइन की शुरुआत में अपना नाम roscd कमांड के साथ टाइप करके लक्ष्य को प्राप्त कर सकते हैं।
अब नई बनाई गई फ़ाइल में निम्न कोड डालें:
rosbots.xacro <?xml version="1.0" encoding="utf-8"?> <robot name="rosbots" xmlns:xacro="http://www.ros.org/wiki/xacro"> <link name="base_footprint"/> <joint name="base_joint" type="fixed"> <origin xyz="0 0 0.05" rpy="0 0 0" /> <parent link="base_footprint"/> <child link="base_link" /> </joint> <link name="base_link"> <visual> <geometry> <mesh filename="package://rosbots_description/meshes/base.dae"/> </geometry> <origin xyz="-0.52 -0.4 0.43" rpy="0 0 0"/> </visual> <collision> <geometry> <mesh filename="package://rosbots_description/meshes/base.dae"/> </geometry> <origin xyz="-0.52 -0.4 0.43" rpy="0 0 0"/> </collision> <inertial> <origin xyz="0.0 0 0."/> <mass value="0.5"/> <inertia ixx="0.01" ixy="0.0" ixz="0.0" iyy="0.01" iyz="0.0" izz="0.03" /> </inertial> </link> <joint name="second_level_joint" type="fixed"> <origin xyz="0 0 0.68" rpy="0 0 0" /> <parent link="base_link"/> <child link="base_second_link" /> </joint> <link name="base_second_link"> <visual> <geometry> <mesh filename="package://rosbots_description/meshes/base.dae"/> </geometry> <origin xyz="-0.52 -0.4 0.0" rpy="0 0 0"/> </visual> <collision> <geometry> <mesh filename="package://rosbots_description/meshes/base.dae"/> </geometry> <origin xyz="-0.52 -0.4 0.0" rpy="0 0 0"/> </collision> <!--inertial> <origin xyz="0.01 0 0.7"/> <mass value="1.0"/> <inertia ixx="0.01" ixy="0.0" ixz="0.0" iyy="0.01" iyz="0.0" izz="0.03" /> </inertial--> </link> <joint name="mcu_joint" type="fixed"> <origin xyz="0.02 0.12 0.73" rpy="0 0 0" /> <parent link="base_link"/> <child link="mcu_link" /> </joint> <link name="mcu_link"> <visual> <geometry> <mesh filename="package://rosbots_description/meshes/rasp.dae" scale="0.14 0.14 0.14"/> </geometry> <origin xyz="0.9 -1.25 0" rpy="0 0 1.57"/> </visual> <collision> <geometry> <mesh filename="package://rosbots_description/meshes/rasp.dae" scale="0.14 0.14 0.14"/> </geometry> <origin xyz="0.9 -1.25 0" rpy="0 0 1.57"/> </collision> <!-- inertial> <origin xyz="0.01 0 0"/> <mass value="1.0"/> <inertia ixx="0.019995" ixy="0.0" ixz="0.0" iyy="0.019995" iyz="0.0" izz="0.03675" /> </inertial--> </link> <joint name="mcu_joint_1" type="fixed"> <origin xyz="0.02 0.12 0.83" rpy="0 0 0" /> <parent link="base_link"/> <child link="mcu_link_1" /> </joint> <link name="mcu_link_1"> <visual> <geometry> <mesh filename="package://rosbots_description/meshes/rasp.dae" scale="0.14 0.14 0.14"/> </geometry> <origin xyz="0.9 -1.25 0" rpy="0 0 1.57"/> </visual> <collision> <geometry> <mesh filename="package://rosbots_description/meshes/rasp.dae" scale="0.14 0.14 0.14"/> </geometry> <origin xyz="0.9 -1.25 0" rpy="0 0 1.57"/> </collision> <!-- inertial> <origin xyz="0.01 0 0"/> <mass value="1.0"/> <inertia ixx="0.019995" ixy="0.0" ixz="0.0" iyy="0.019995" iyz="0.0" izz="0.03675" /> </inertial--> </link> <joint name="stand_mcu1_joint" type="fixed"> <origin xyz="0.02 0.25 0.78" rpy="0 0 1.57" /> <parent link="base_link"/> <child link="stand_mcu1_link" /> </joint> <link name="stand_mcu1_link"> <visual> <geometry> <cylinder length="0.1" radius="0.01"/> </geometry> <origin rpy="0.0 0 0" xyz="0 0 0.0"/> </visual> <collision> <geometry> <cylinder length="0.1" radius="0.01"/> </geometry> <origin rpy="0.0 0 0" xyz="0 0 0.0"/> </collision> </link> <joint name="stand_mcu2_joint" type="fixed"> <origin xyz="0.02 -0.1125 0.78" rpy="0 0 1.57" /> <parent link="base_link"/> <child link="stand_mcu2_link" /> </joint> <link name="stand_mcu2_link"> <visual> <geometry> <cylinder length="0.1" radius="0.01"/> </geometry> <origin rpy="0.0 0 0" xyz="0 0 0.0"/> </visual> <collision> <geometry> <cylinder length="0.1" radius="0.01"/> </geometry> <origin rpy="0.0 0 0" xyz="0 0 0.0"/> </collision> </link> <joint name="stand_mcu3_joint" type="fixed"> <origin xyz="0.25 0.25 0.78" rpy="0 0 1.57" /> <parent link="base_link"/> <child link="stand_mcu3_link" /> </joint> <link name="stand_mcu3_link"> <visual> <geometry> <cylinder length="0.1" radius="0.01"/> </geometry> <origin rpy="0.0 0 0" xyz="0 0 0.0"/> </visual> <collision> <geometry> <cylinder length="0.1" radius="0.01"/> </geometry> <origin rpy="0.0 0 0" xyz="0 0 0.0"/> </collision> </link> <joint name="stand_mcu4_joint" type="fixed"> <origin xyz="0.25 -0.1125 0.78" rpy="0 0 1.57" /> <parent link="base_link"/> <child link="stand_mcu4_link" /> </joint> <link name="stand_mcu4_link"> <visual> <geometry> <cylinder length="0.1" radius="0.01"/> </geometry> <origin rpy="0.0 0 0" xyz="0 0 0.0"/> </visual> <collision> <geometry> <cylinder length="0.1" radius="0.01"/> </geometry> <origin rpy="0.0 0 0" xyz="0 0 0.0"/> </collision> </link> <joint name="batery_joint" type="fixed"> <origin xyz="1.2 0.2 0.43" rpy="0 0 1.57" /> <parent link="base_link"/> <child link="batery_link" /> </joint> <link name="batery_link"> <visual> <geometry> <mesh filename="package://rosbots_description/meshes/battery.dae" scale="13.0 6.0 6.0"/> </geometry> <origin xyz="0 4.5 0.05" rpy="1.57 0 1.57"/> </visual> <collision> <geometry> <mesh filename="package://rosbots_description/meshes/battery.dae" scale="13.0 6.0 6.0"/> </geometry> <origin xyz="0 4.5 0.05" rpy="1.57 0 1.57"/> </collision> <!-- inertial> <origin xyz="0.01 0 0"/> <mass value="1.0"/> <inertia ixx="0.01" ixy="0.0" ixz="0.0" iyy="0.01" iyz="0.0" izz="0.03" /> </inertial--> </link> <joint name="stand_1_joint" type="fixed"> <origin xyz="0.5 0.4125 0.58" rpy="0 0 1.57" /> <parent link="base_link"/> <child link="stand_1_link" /> </joint> <link name="stand_1_link"> <visual> <geometry> <cylinder length="0.20" radius="0.03"/> </geometry> <origin rpy="0.0 0 0" xyz="0 0 0.0"/> </visual> <collision> <geometry> <cylinder length="0.20" radius="0.03"/> </geometry> <origin rpy="0.0 0 0" xyz="0 0 0.0"/> </collision> <!--inertial> <origin xyz="0.0 0 0"/> <mass value="1.0"/> <inertia ixx="0.019995" ixy="0.0" ixz="0.0" iyy="0.019995" iyz="0.0" izz="0.03675" /> </inertial--> </link> <joint name="stand_2_joint" type="fixed"> <origin xyz="0.5 -0.2625 0.58" rpy="0 0 1.57" /> <parent link="base_link"/> <child link="stand_2_link" /> </joint> <link name="stand_2_link"> <visual> <geometry> <cylinder length="0.20" radius="0.03"/> </geometry> <origin rpy="0.0 0 0" xyz="0 0 0.0"/> </visual> <collision> <geometry> <cylinder length="0.20" radius="0.03"/> </geometry> <origin rpy="0.0 0 0" xyz="0 0 0.0"/> </collision> <!--inertial> <origin xyz="0.0 0 0"/> <mass value="1.0"/> <inertia ixx="0.019995" ixy="0.0" ixz="0.0" iyy="0.019995" iyz="0.0" izz="0.03675" /> </inertial--> </link> <joint name="wheel_left_joint" type="continuous"> <parent link="base_link"/> <child link="wheel_left_link"/> <origin xyz="0.15 0.4125 0.30" rpy="-1.57 0 0"/> <axis xyz="0 0 1"/> </joint> <link name="wheel_left_link"> <collision> <geometry> <cylinder length="0.20" radius="0.23"/> </geometry> <origin rpy="0.0 0.0 0" xyz="0 0 0.1"/> </collision> <visual name="visual"> <geometry> <!-- cylinder length="0.0206" radius="0.0550"/--> <!--cylinder length="0.20" radius="0.26"/--> <mesh filename="package://rosbots_description/meshes/wheel.dae" scale="8.0 8.0 8.0"/> </geometry> <origin rpy="0.0 0 0" xyz="0 0 0"/> </visual> <inertial> <mass value="0.4" /> <origin xyz="0 0 0" /> <inertia ixx="0.001" ixy="0.0" ixz="0.0" iyy="0.001" iyz="0.0" izz="0.001" /> </inertial> </link> <joint name="wheel_right_joint" type="continuous"> <parent link="base_link"/> <child link="wheel_right_link"/> <origin xyz="0.15 -0.5625 0.30" rpy="-1.57 0 0"/> <axis xyz="0 0 1"/> </joint> <link name="wheel_right_link"> <collision> <geometry> <cylinder length="0.20" radius="0.23"/> </geometry> <origin rpy="0.0 0 0" xyz="0 0 0.195"/> </collision> <visual name="visual"> <geometry> <!--cylinder length="0.20" radius="0.26"/--> <mesh filename="package://rosbots_description/meshes/wheel.dae" scale="8.0 8.0 8.0"/> </geometry> <origin rpy="0.0 0 0" xyz="0 0 0"/> </visual> <inertial> <mass value="0.4" /> <origin xyz="0 0.0 0.3" /> <inertia ixx="0.001" ixy="0.0" ixz="0.0" iyy="0.001" iyz="0.0" izz="0.001" /> </inertial> </link> <joint name="caster_back_joint" type="fixed"> <parent link="base_link"/> <child link="caster_back_link"/> <origin xyz="-0.4 0.1 0.26" rpy="0 0 0"/> </joint> <link name="caster_back_link"> <collision> <geometry> <!-- cylinder length="0.05" radius="0.19"/--> <sphere radius="0.19"/> </geometry> <origin rpy="0 0 0" xyz="0 0 0"/> </collision> <visual> <geometry> <!--cylinder length="0.05" radius="0.19"/--> <sphere radius="0.19"/> </geometry> <origin rpy="0 0 0" xyz="0 0 0"/> </visual> <inertial> <mass value="0.1" /> <origin xyz="0 0 0" /> <inertia ixx="0.001023539" ixy="0.0" ixz="0.0" iyy="0.001023539" iyz="0.0" izz="0.001023539" /> </inertial> </link> <joint name="stand_3_joint" type="fixed"> <origin xyz="-0.4 0.4125 0.58" rpy="0 0 1.57" /> <parent link="base_link"/> <child link="stand_3_link" /> </joint> <link name="stand_3_link"> <visual> <geometry> <cylinder length="0.20" radius="0.03"/> </geometry> <origin rpy="0.0 0 0" xyz="0 0 0.0"/> </visual> <collision> <geometry> <cylinder length="0.20" radius="0.03"/> </geometry> <origin rpy="0.0 0 0" xyz="0 0 0.0"/> </collision> </link> <joint name="stand_4_joint" type="fixed"> <origin xyz="-0.4 -0.2625 0.58" rpy="0 0 1.57" /> <parent link="base_link"/> <child link="stand_4_link" /> </joint> <link name="stand_4_link"> <visual> <geometry> <cylinder length="0.20" radius="0.03"/> </geometry> <origin rpy="0.0 0 0" xyz="0 0 0.0"/> </visual> <collision> <geometry> <cylinder length="0.20" radius="0.03"/> </geometry> <origin rpy="0.0 0 0" xyz="0 0 0.0"/> </collision> </link> </robot>
यदि कोड दिखाई नहीं देता है, तो सभी फाइलें पोस्ट के अंत में डाउनलोड की जा सकती हैं।
ऊपर दिए गए कोड के लिए, हमें कोशिकाओं (मेहराबों) की भी आवश्यकता होती है, जिसे पैकेज के लॉन्च के दौरान लोड किया जाएगा।
यहां मेहराबें ली जा सकती
हैंऔर rosbots_description में अनपैक किए गए mech फ़ोल्डर डालें।
यदि आप कोड को विस्तार से देखते हैं, तो आप पता लगा सकते हैं कि यह एक मानक xml फ़ाइल है जिसमें ब्लॉक हैं:
- दृश्य
- टक्कर
- जड़ता
प्रत्येक ब्लॉक अपने हिस्से का वर्णन करता है: दृश्य रोबोट की उपस्थिति है, कोई और नहीं, टकराव और जड़ता रोबोट की भौतिकी है, कैसे सब कुछ बाहरी दुनिया के साथ बातचीत करेगा - टकराव, जड़ता।
जोड़ - तत्व जो रोबोट के कुछ हिस्सों (लिंक) के बीच की गति को निर्धारित करने में मदद करते हैं। उदाहरण के लिए, पहिया (पहिया) की गति फ्रेम को एक पूरे (चेसिस) के रूप में प्रभावित करती है।
मूल xyz x, y, z axes के साथ वस्तु का प्रारंभिक स्थान है।
पैरेंट लिंक और चाइल्ड लिंक क्रमशः पैरेंट और चाइल्ड लिंक होते हैं, जो कि किस से बढ़ता है।
प्रकारों की उपस्थिति भी उल्लेखनीय है: प्रकार = "निरंतर", प्रकार = "निश्चित"। यह एक परिभाषा है कि क्या घूम सकता है और क्या नहीं। तो पहिए निरंतर हैं। और, उदाहरण के लिए, batery_joint तय है।
कोड में इंडेंटेशन पाइथन में उतना ही अर्थपूर्ण है, जहां आप टैब और स्पेस के साथ हस्तक्षेप नहीं कर सकते हैं, न ले जाएं। लेकिन एक पूर्णतावादी के स्वर्ग और दृश्यता के लिए यह उनके लिए बेहतर है।
उपरोक्त कोड अनिवार्य रूप से एक रोबोट मॉडल है।
Rviz पर काम करें
आइए देखें क्या हुआ।
ऐसा करने के लिए, एक स्टार्टअप फ़ाइल बनाएं जो ROS पैकेज चलाएगी।
इसके लिए, तथाकथित लॉन्च फ़ाइलों का उपयोग आरओएस में किया जाता है। लॉन्च फ़ाइल का सार सभी तर्कों और अन्य को निर्दिष्ट करने की आवश्यकता के बिना एक शॉर्ट कमांड के साथ एक नोड, कमांड, या कई नोड के लॉन्च की अनुमति देना है।
Rviz.launch फ़ाइल के साथ rosbots_description में एक लॉन्च फ़ोल्डर बनाएँ:
roscd rosbots_description mkdir launch; cd launch; touch rviz.launch
* यह और बाद का समय, आरओएस पैकेज बनाने की कोई आवश्यकता नहीं है जैसा कि पहले किया गया था। अब सिस्टम खुद ही पैकेज के अंदर की फाइलों को "देखेगा"। इसलिए, हम सिर्फ एक निर्देशिका बनाते हैं।
फ़ाइल को सामग्री से भरें -
rviz.launch <?xml version="1.0"?> <launch> <param name="robot_description" command="cat '$(find rosbots_description)/urdf/rosbots.xacro'"/> <node name="joint_state_publisher" pkg="joint_state_publisher" type="joint_state_publisher"> <param name="use_gui" value="False"/> </node> <node name="robot_state_publisher" pkg="robot_state_publisher" type="state_publisher"/> <node name="rviz" pkg="rviz" type="rviz" /> </launch>
यहां आप देख सकते हैं कि स्टार्टअप में सिस्टम rosbots.xacro में एक मॉडल विवरण की तलाश करेगा।
इसके बाद, यह 3 नोड्स लॉन्च करेगा: joint_state_publisher से joint_state_publisher पैकेज, robot_state_publisher रोबॉट_state_publisher से, rviz से rviz। प्रकार नोड का प्रकार है, आमतौर पर एक ही नाम के पायथन या सी फ़ाइल से मेल खाती है, लेकिन बिना एक्सटेंशन के निर्दिष्ट है।
चलाएँ:
1 टर्मिनल में, ROS मास्टर चलाएँ:
roscore
2 में:
roslaunch rosbots_description rviz.launch
* यदि कोई त्रुटि हुई
ROS_MASTER_URI [http: //192.168.1 ....: 11311] होस्ट इस मशीन पर सेट नहीं है
, तो आपको bashrc की जाँच करने की आवश्यकता है - जिस पर IP ROS चल रहा है:
nano ~/.bashrc
bashrc फ़ाइल में वर्चुअल मशीन का आईपी निर्दिष्ट करें (उदाहरण के लिए, यह):
export ROS_MASTER_URI=http://192.168.1.114:11311
बशर्ते आगे पढ़ें:
source ~/.bashrc या रिबूट
**
यदि roslaunch अभी भी शुरू नहीं होता है, तो आप catkin_ws फ़ोल्डर में जाने और चलाने की कोशिश कर सकते हैं: स्रोत devel / setup .bash
Rviz में डाइविंग
कमांड निष्पादित होने के बाद, आरवीज़ संपादक शुरू होता है और ग्राफिकल खोल खुलता है।
दृश्य प्रस्तुति भिन्न हो सकती है, लेकिन सामान्य रूप से दृश्य लगभग निम्नानुसार होगा:
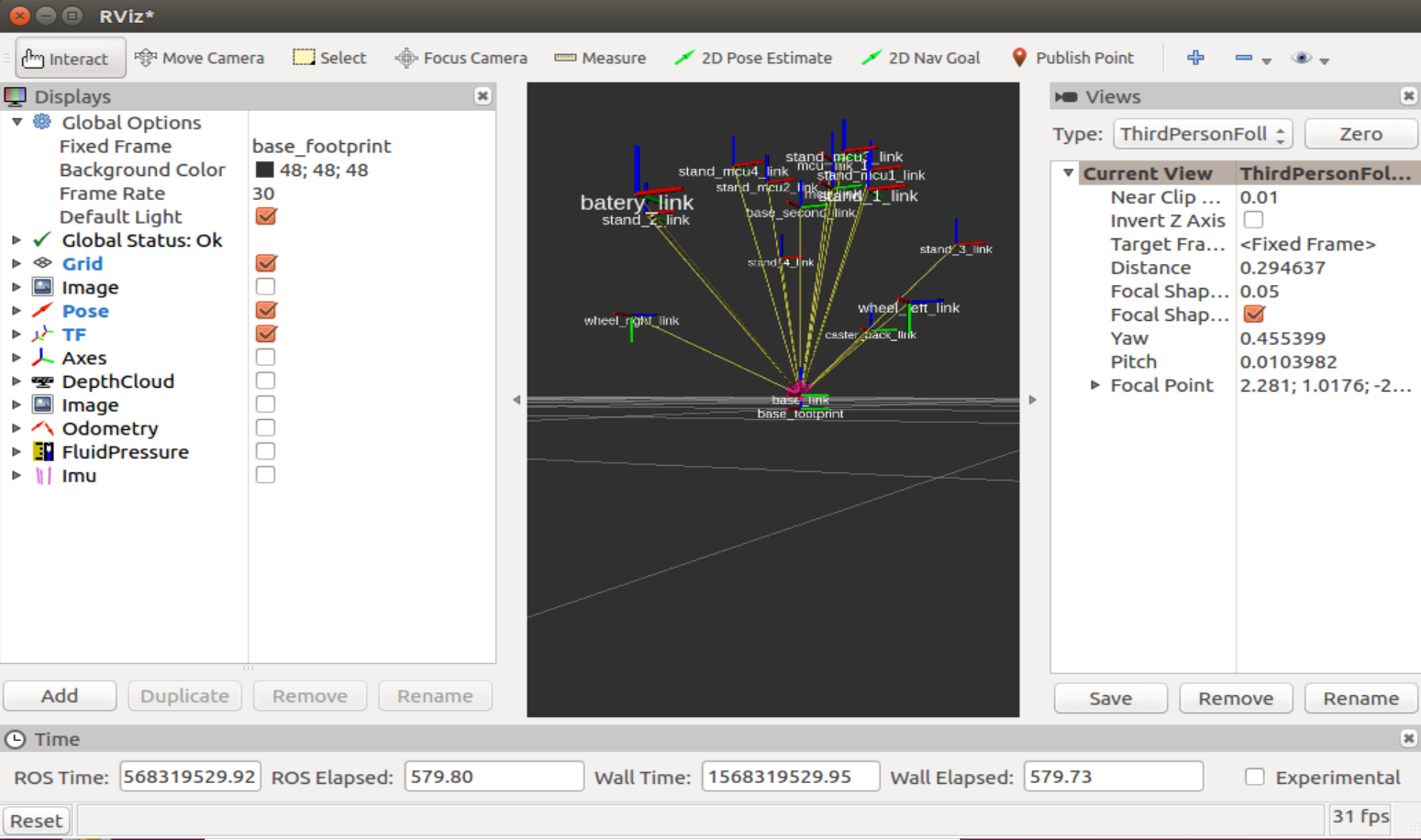
डिस्प्ले कॉलम में बाईं ओर, आप ROS नोड्स के साथ बातचीत करने वाले विभिन्न तत्वों के प्रदर्शन विकल्पों का अवलोकन कर सकते हैं, केंद्र में - रोबोट की छवि, दाईं ओर - एक रोबोट-जैसा कैमरा वाला कॉलम। मुझे तुरंत यह कहना चाहिए कि राइज़ के साथ 3-व्हील माउस के साथ काम करना बेहतर है, क्योंकि सभी माउस बटन यहां शामिल हैं। बाईं ओर पकड़कर, आप प्रदर्शित की गई रोबोट के साथ खिड़की में अंतरिक्ष को घुमा सकते हैं, दाएं - ज़ूम इन / आउट, दोनों चाबियों को पकड़कर - अंतरिक्ष को रोबोट के सापेक्ष स्थानांतरित कर सकते हैं।
संपादक में अधिकांश काम पहले दो कॉलम में किए जाते हैं: रोबोट के दृश्य और दृश्य प्रतिनिधित्व।
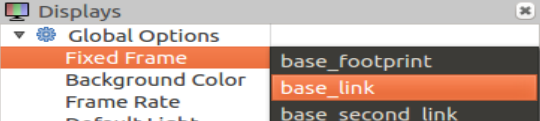
चलो एक रोबोट की नज़र से काम करते हैं
चलो "फिक्स्ड फ़्रेम" चुनें - लाइन में "आधार लिंक":
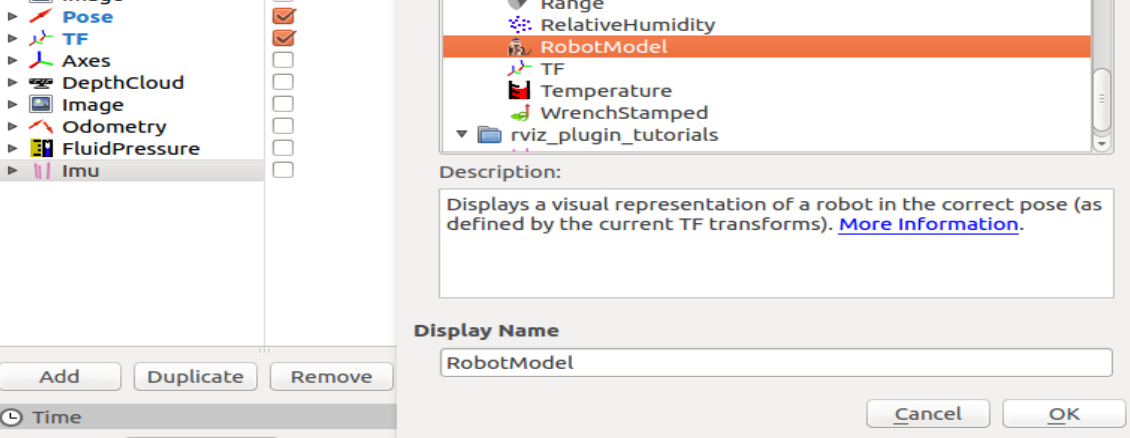
और प्रदर्शित करने के लिए रोबोट विवरण जोड़ें:
"जोड़ें" पर क्लिक करें और सूची में "RobotModel" चुनें:
"
अब सिमुलेशन विंडो में आप उस रोबोट को देख सकते हैं जिसे rviz.xacro मॉडल से पुन: पेश किया गया था:
"
बहुत बढ़िया। एक दृश्य प्रतिनिधित्व के साथ, सब कुछ स्पष्ट है। अब आपको यह समझने की आवश्यकता है कि सिमुलेशन को कैसे चलाना है, क्योंकि rviz केवल सिमुलेशन
का एक
दृश्य है , लेकिन सिमुलेशन ही नहीं।
यानी भौतिकी यहां काम नहीं करती।
अनुकृति खुद गज़ेबो नामक संपादक में रहती हैं।
gazebo
बनाए गए मॉडल को गज़ेबो में रखने के लिए, प्रोजेक्ट के लॉन्च फ़ोल्डर में एक और लॉन्च फ़ाइल - स्पॉन.लांच बनाएं। अब हमारे पास 2 लॉन्च फाइलें हैं!
spawn.launch <?xml version="1.0" encoding="UTF-8"?> <launch> <param name="robot_description" command="cat '$(find rosbots_description)/urdf/rosbots.xacro'" /> <arg name="x" default="0"/> <arg name="y" default="0"/> <arg name="z" default="0.5"/> <node name="mybot_spawn" pkg="gazebo_ros" type="spawn_model" output="screen" args="-urdf -param robot_description -model rosbots -x $(arg x) -y $(arg y) -z $(arg z)" /> </launch>
यहां हम मॉडल भी पढ़ते हैं, फिर तर्कों के साथ हम इसके स्थान को x, y, z axes के साथ अंतरिक्ष में पास करते हैं। इसके बाद, केवल एक नोड चलाएँ - mybot_spawn gazebo_ros पैकेज से।
* ऊपर उल्लेखित संकुल को पुनः स्थापित करने की आवश्यकता नहीं है। यदि वांछित है, तो आप इन पैकेजों को एक ही कमांड के साथ देख सकते हैं: roscd। उदाहरण के लिए roscd gazebo_ros।
अब टर्मिनल 1 में रोस-मास्टर को रोकें:
CTRL+C
और गज़ेबो संपादक चलाएं:
roslaunch gazebo_ros empty_world.launch
टर्मिनल 2 में, नई बनाई गई फ़ाइल चलाएँ:
roslaunch rosbots_description spawn.launch
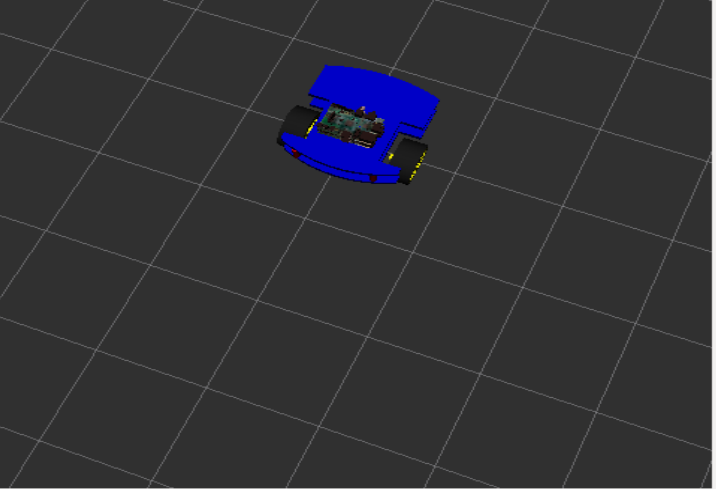
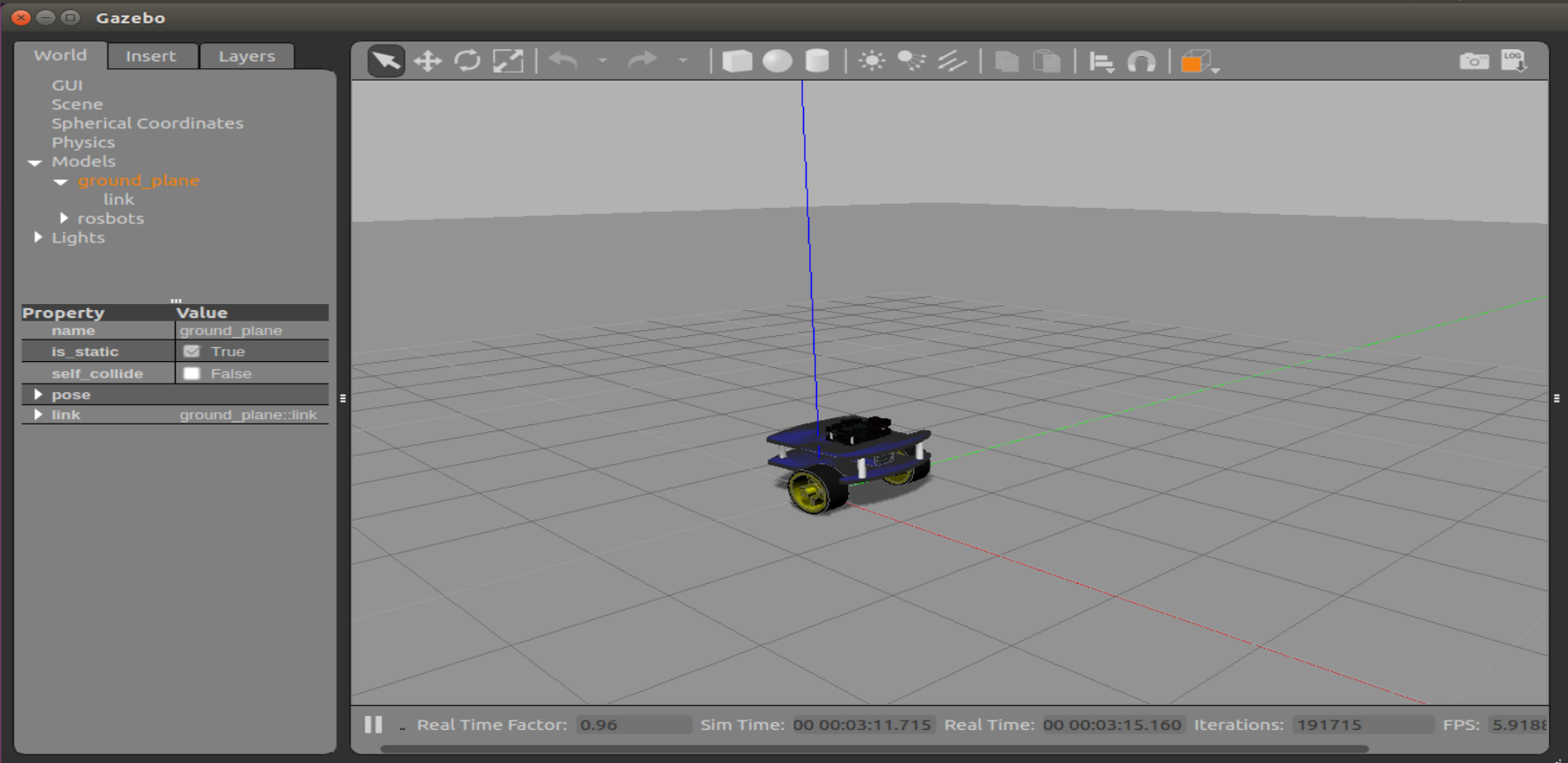
अब हम अपने रोबोट को गज़ेबो संपादक के अनुकरण में देखते हैं:
* अगर आपसे कोई गलती हुई है:
Waiting for service /gazebo/spawn_urdf_modelइसका मतलब है कि आपने लॉन्च के आदेश का उल्लंघन करते हुए पहली बार गज़ेबो को शुरू किए बिना मॉडल लॉन्च किया।
चलो गज़ेबो सिमुलेशन पर जाएं।
अब समापन कोड से पहले rosbots.xacro में निम्न कोड जोड़ें:
कोड <gazebo> <plugin name="differential_drive_controller" filename="libgazebo_ros_diff_drive.so"> <legacyMode>false</legacyMode> <alwaysOn>true</alwaysOn> <publishWheelTF>true</publishWheelTF> <publishTf>1</publishTf> <publishWheelJointState>true</publishWheelJointState> <updateRate>100.0</updateRate> <leftJoint>wheel_left_joint</leftJoint> <rightJoint>wheel_right_joint</rightJoint> <wheelSeparation>1.1</wheelSeparation> <wheelDiameter>0.52</wheelDiameter> <wheelAcceleration>1.0</wheelAcceleration> <torque>20</torque> <commandTopic>/part2_cmr/cmd_vel</commandTopic> <odometryTopic>odom</odometryTopic> <odometryFrame>odom</odometryFrame> <robotBaseFrame>base_link</robotBaseFrame> </plugin> </gazebo>
सिम्युलेटर गज़ेबो को संपादित करते समय बंद नहीं किया जा सकता है।
अब गज़ेबो संपादक से मॉडल हटाएं:
rosservice call /gazebo/delete_model "model_name: 'rosbots'"
या बस संपादक को पुनरारंभ करें।
* गज़ेबो एक वर्चुअल मशीन में क्रैंक है, इसलिए इसे बंद करने के बाद भी टर्मिनल में CTRL + C को कभी-कभी माफ़ कर देते हैं।
संपादन के बाद मॉडल को गज़ेबो में फिर से रखें:
roslaunch rosbots_description spawn.launch
यदि आप अब ROS विषयों की सूची देखते हैं, तो आप देख सकते हैं कि उनमें से हैं
/part2_cmr/cmd_vel
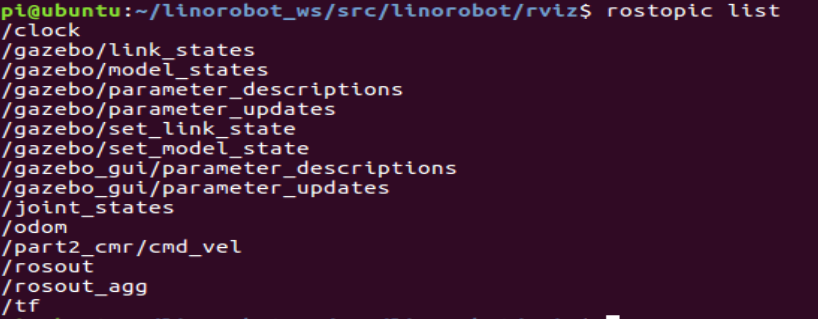
अब एक अलग टर्मिनल में नियंत्रण चलाकर सिमुलेशन में रोबोट को नियंत्रित करने का प्रयास करें:
rosrun teleop_twist_keyboard teleop_twist_keyboard.py /cmd_vel:=/part2_cmr/cmd_vel
टर्मिनल विंडो में "आइ", "एल", "जे", "के", "," कंट्रोल को चलाने और दबाने के साथ विंडो में होने के कारण, आप गज़ेबो एडिटर के सिमुलेशन में रोबोट के आंदोलन का निरीक्षण कर सकते हैं:
कोड -
डाउनलोड ।
जारी रखा जाए।