श्रृंखला में पोस्ट:
8. हम फोन-आरओएस कंट्रोल, जीपीएस-नोड से नियंत्रित करते हैं7. रोबोट स्थानीयकरण: जीएमपी, एएमसीएल, कमरे के नक्शे पर संदर्भ बिंदु6. पहिया एनकोडर, कमरे के नक्शे, लिडार के साथ ओडोमेट्री5. हम rviz और gazebo में काम करते हैं: xacro, नए सेंसर।4. rviz और gazebo संपादकों का उपयोग करके एक रोबोट सिमुलेशन बनाएं।3. तेजी लाने, कैमरा बदलने, गेट को ठीक करें2. सॉफ्टवेयर1. लोहापिछली बार, निम्नलिखित लक्ष्य प्राप्त किए गए थे:
- रोबोट का urdf-description युक्त xacro-file बनाकर रोबोट की कल्पना करें;
- दो लॉन्च फाइलें बनाएं, जिनमें से एक आपको संपादक-सिम्युलेटर गज़ेबो में रोबोट को रखने की अनुमति देता है;
- कीबोर्ड से गज़ेबो सिम्युलेटर में रोबोट को नियंत्रित करें।
इस पोस्ट में, हम xacro मॉड्यूल के रूप में प्रोजेक्ट को व्यवस्थित करेंगे ताकि यह अधिक पठनीय हो जाए (पहले, स्पष्टता के लिए, हमने पूरे विवरण को एक xacro फ़ाइल में धकेल दिया)। एक आभासी वीडियो कैमरा जोड़ें और imu। आइए देखें कि हमारे आसपास की दुनिया में विदेशी वस्तुओं में गज़ेबो को कैसे जोड़ा जाए।
पहले, जांचें कि क्या roscd कमांड का उपयोग कर टर्मिनल ROS सिस्टम के माध्यम से नेविगेट कर रहा है:
roscd rosbots_description/launch
यदि यह काम नहीं करता है, तो catkin_ws के साथ फ़ोल्डर में जाएं और कमांड निष्पादित करें:
source devel/setup.bash
अब रोबोट के विवरण के साथ फ़ोल्डर पर चलते हैं:
roscd rosbots_description/launch
पहले बनाई गई स्पॉन.लंच फ़ाइल में, निम्नलिखित संकेत दिया गया था:
<param name="robot_description" command="cat '$(find rosbots_description)/urdf/rosbots.xacro'" />
Cat कमांड का उपयोग rosbots.xacro की सामग्री को robot_description पैरामीटर में लोड करने के लिए किया गया था।
Xacro कमांड फॉर्मेट का पूरा फायदा उठाने के लिए कोड को थोड़ा ठीक करना होगा। उपरोक्त पंक्ति को निम्नलिखित के साथ बदलें:
<param name="robot_description" command="$(find xacro)/xacro.py '$(find rosbots_description)/urdf/rosbots.xacro'" />
अब सिस्टम roacbots.xacro को निष्पादित करने के लिए xacro.py का उपयोग करेगा।
दूसरे लॉन्च फ़ाइल के लिए समान परिवर्तन आवश्यक होंगे - rviz.launch।
बदल
<param name="robot_description" command="cat '$(find rosbots_description)/urdf/rosbots.xacro'" />
पर
<param name="robot_description" command="$(find xacro)/xacro.py '$(find rosbots_description)/urdf/rosbots.xacro'"/>
जांचें कि सब कुछ नए सिंटैक्स के साथ काम करता है।
सबसे पहले, rviz एडिटर में मॉडल देखें:
roslaunch rosbots_description rviz.launch
फिर, rviz को बंद करके, गज़ेबो में जांचें।
पहला टर्मिनल:
roslaunch gazebo_ros empty_world.launch
2:
roslaunch rosbots_description spawn.launch
* आप संदेशों को देख सकते हैं
पीला रंग xacro: Traditional processing is deprecated. Switch to --inorder processing! To check for compatibility of your document, use option --check-order. For more infos, see http://wiki.ros.org/xacro#Processing_Order xacro.py is deprecated; please use xacro instead
वे मौसम नहीं देते हैं, इसलिए आप ध्यान नहीं दे सकते।
तो, सब कुछ पहले की तरह काम करता है, अब केवल xacro प्रारूप का उपयोग किया जाता है।
वह क्या देता है? यह प्रारूप आपको कोड को पुनर्गठित करने की अनुमति देता है। जैसे ही परियोजना बढ़ती है, इससे भविष्य में बेहतर नेविगेट करना संभव होगा।
Xacro के साथ काम करना
अब यह rosbots.xacro को अपने घटक भागों में विभाजित करने और xacro का लाभ लेने का समय है।
एक नई फ़ाइल के लिए rosbots.xacro से गज़ेबो संपादक (गज़ेबो टैग) के बारे में सब कुछ स्थानांतरित करें।
URL फ़ोल्डर में rosbots.gazebo.xacro फ़ाइल बनाएँ:
nano rosbots.gazebo.xacro
और वहां कोड डालें:
rosbots.gazebo.xacro <?xml version="1.0"?> <robot xmlns:xacro="http://www.ros.org/wiki/xacro" name="rosbots" > <gazebo> <plugin name="differential_drive_controller" filename="libgazebo_ros_diff_drive.so"> <legacyMode>false</legacyMode> <alwaysOn>true</alwaysOn> <publishWheelTF>true</publishWheelTF> <publishTf>1</publishTf> <publishWheelJointState>true</publishWheelJointState> <updateRate>100.0</updateRate> <leftJoint>wheel_left_joint</leftJoint> <rightJoint>wheel_right_joint</rightJoint> <wheelSeparation>1.1</wheelSeparation> <wheelDiameter>0.52</wheelDiameter> <wheelAcceleration>1.0</wheelAcceleration> <torque>20</torque> <commandTopic>/part2_cmr/cmd_vel</commandTopic> <odometryTopic>odom</odometryTopic> <odometryFrame>odom</odometryFrame> <robotBaseFrame>base_link</robotBaseFrame> </plugin> </gazebo> </robot>
टैग के भीतर समान कोड
<gazebo> </gazebo>
rosbots.xacro फ़ाइल से हटाएं।
अब हम नवसृजित फ़ाइल को rosbots.xacro से जोड़ देंगे। कहीं से, rosbots.xacro के गज़ेबो घटक के बारे में समान जानकारी प्राप्त की जानी चाहिए!
तदनुसार, rosbots.xacro में जोड़ें:
<xacro:include filename="$(find rosbots_description)/urdf/rosbots.gazebo.xacro" />
टैग के साथ लाइन के बाद इस लाइन को डालें
<robot>
। अब फाइल की शुरुआत इस तरह होती है:
<robot name="rosbots" xmlns:xacro="http://www.ros.org/wiki/xacro"> <xacro:include filename="$(find rosbots_description)/urdf/rosbots.gazebo.xacro" />
फिर से जांचें कि नया प्रारूप में सब कुछ काम करता है:
पहला टर्मिनल:
roslaunch gazebo_ros empty_world.launch
2:
roslaunch rosbots_description spawn.launch
इस प्रकार, उपयोगकर्ता के लिए, सिमुलेशन में मॉडल को लॉन्च करने के मामले में सब कुछ अपनी जगह पर रहता है, कमांड समान हैं।
नए सेंसर जोड़ें
अब जब परियोजना ने कम या ज्यादा संरचित रूप ले लिया है, तो हम अतिरिक्त सेंसर संलग्न करेंगे।
"बॉडी किट" के साथ रोबोट को जोर से अव्यवस्थित नहीं करने के लिए, हम केवल दो सेंसर जोड़ते हैं: एक कैमरा और इमू (जड़त्वीय मापक मॉड्यूल या जाइरोस्कोप)।
इन उद्देश्यों के लिए, आपको rosbots.xacro और rosbots.gazebo.xacro फ़ाइलों को ठीक करना होगा।
चलो कैमरा और rosbots.xacro फ़ाइल से शुरू करते हैं। सब कुछ के लिए बाहर काम करने के लिए, आपको जो संवेदक जोड़ना होगा:
- संचार (लिंक)। यह एक डीईई फ़ाइल द्वारा दर्शाया जाएगा।
- संयुक्त, जो कैमरे को रोबोट के शरीर से जोड़ देगा।
एक अन्य फ़ाइल में - rosbots.gazebo.xacro - हम जोड़ देंगे:
- एक प्लगइन जो सेंसर के रूप में ऊपर दिए गए लिंक का पता लगाएगा।
हम इसे टैग के भीतर rosbots.xacro में रखते हैं (सुविधा के लिए, आप इसे अंत में जोड़ सकते हैं):
rosbots.xacro <joint name="camera_joint" type="fixed"> <origin xyz="0.49 -0.03 0.75" rpy="0 0.21 0" /> <parent link="base_link"/> <child link="camera_link" /> </joint> <link name="camera_link"> <visual> <geometry> <mesh filename="package://rosbots_description/meshes/camera.dae" scale="4.0 4.0 4.0"/> </geometry> <origin xyz="0.0 0 0" rpy="0 0 0"/> </visual> <collision> <geometry> <mesh filename="package://rosbots_description/meshes/camera.dae" scale="4.0 4.0 4.0"/> </geometry> <origin xyz="0.0 0 0" rpy="0 0 0"/> </collision> </link>
ऊपर दिया गया कोड हमारे कैमरे से लिंक और संयुक्त जोड़ता है, जिससे इसे विज़ुअलाइज़ किया जा सकता है।
इसे देखें।
पहला टर्मिनल:
roslaunch gazebo_ros empty_world.launch
2:
roslaunch rosbots_description spawn.launch
यदि सब कुछ सही है, तो आप रोबोट (सफेद) पर जोड़ा गया कैमरा देख सकते हैं:

ऐसा लगता है कि सब कुछ सरल है। हालांकि, यह समझना चाहिए कि केवल कैमरा विज़ुअलाइज़ेशन जोड़ा गया है। यह कैमरा भौतिक चीजों की दुनिया में कैसे व्यवहार करेगा यह अभी तक स्पष्ट नहीं है। उसका व्यवहार अपरिभाषित है। कैमरा अभी तक फ़ोटो लेने या वीडियो शूट करने में सक्षम नहीं है।
यह गेज्बो वाली फ़ाइल पर काम करने की बारी है।
में जोड़ें
rosbots.gazebo.xacroटैग के अंदर
<robot> </robot>
जोड़ें:
<gazebo reference="camera_link"> <sensor type="camera" name="camera1"> <update_rate>30.0</update_rate> <camera name="head"> <horizontal_fov>1.04</horizontal_fov> <image> <width>320</width> <height>240</height> <format>R8G8B8</format> </image> <clip> <near>0.1</near> <far>50</far> </clip> </camera> <plugin name="camera_controller" filename="libgazebo_ros_camera.so"> <alwaysOn>true</alwaysOn> <updateRate>0</updateRate> <cameraName>camera1</cameraName> <imageTopicName>image_raw</imageTopicName> <cameraInfoTopicName>camera_info</cameraInfoTopicName> <frameName>camera</frameName> <hackBaseline>0.07</hackBaseline> <distortionK1>0.0</distortionK1> <distortionK2>0.0</distortionK2> <distortionK3>0.0</distortionK3> <distortionT1>0.0</distortionT1> <distortionT2>0.0</distortionT2> </plugin> </sensor> </gazebo>
जैसा कि कोड में अनुमान लगाना आसान है, हमने कैमरा पैरामीटर निर्धारित किए:
- update_rate: डेटा कितनी बार आएगा
- चौड़ाई / ऊंचाई: चित्रों का संकल्प। इस मामले में, 320x240।
- प्रारूप: वीडियो प्रारूप (R8G8B8)।
- imageTopicName: उस विषय का नाम जहां डेटा भेजा जाएगा
- फ्रेमनाम: लिंक-लिंक जिससे कैमरा जुड़ा होगा।
अब सब कुछ कैमरे और इसके सिमुलेशन की कल्पना करने के लिए तैयार है।
यदि आप अब सिमुलेशन को पुनः आरंभ करते हैं और विषयों की सूची देखते हैं, तो आप देख सकते हैं कि उनमें से कैमरे द्वारा उत्पन्न विषय जोड़े गए हैं:
rostopic list
/rosbots/camera1/camera_info /rosbots/camera1/image_raw /rosbots/camera1/image_raw/compressed /rosbots/camera1/image_raw/compressed/parameter_descriptions /rosbots/camera1/image_raw/compressed/parameter_updates /rosbots/camera1/image_raw/compressedDepth /rosbots/camera1/image_raw/compressedDepth/parameter_descriptions /rosbots/camera1/image_raw/compressedDepth/parameter_updates /rosbots/camera1/image_raw/theora /rosbots/camera1/image_raw/theora/parameter_descriptions /rosbots/camera1/image_raw/theora/parameter_updates /rosbots/camera1/parameter_descriptions /rosbots/camera1/parameter_updates
विषयों का एक पूरा शस्त्रागार है! लेकिन, एक नियम के रूप में, उनमें से सभी को पहले तीन को छोड़कर इतनी बार उपयोग नहीं किया जाता है।
गज़ेबो सिम्युलेटर से rviz में छवि
* यहां यह ध्यान दिया जाना चाहिए कि जब आप वर्चुअल वीडियो कैमरे से rviz पर प्रसारण शुरू करने का प्रयास करते हैं तो VMWare वर्कस्टेशन गज़ेबो के लिए इमेज के वर्तमान कॉन्फ़िगरेशन में क्रैश हो जाता है। त्रुटि अनुभाग में पोस्ट के अंत में एक संभावित समाधान का संकेत दिया गया है।स्पष्टता के लिए, जब सिमुलेशन में कैमरे के साथ काम करते हैं, तो rviz चलाएं और रोबोट के सामने कुछ ऑब्जेक्ट रखें।
ऐसा करने के लिए, आपको सबसे पहले ऑब्जेक्ट की आवश्यकता है, जिसे गज़ेबो में जोड़ा जाएगा।
Object.urdf फ़ाइल डाउनलोड करें और इसे ~ / catkin_ws / src / में डालें
चलो इसे चलाते हैं।
पहला टर्मिनल:
roslaunch gazebo_ros empty_world.launch
2 (मॉडल रखें):
rosrun gazebo_ros spawn_model -file /home/pi/catkin_ws/src/object.urdf -urdf -x 1 -y 0 -z 1 -model my_object
roslaunch rosbots_description spawn.launch
सिमुलेशन में हमें निम्नलिखित चित्र मिलते हैं:

एक रोबोट मॉडल और एक पोस्ट जिसे एक मॉडल के रूप में भी जोड़ा गया था।
आइटम सम्मिलित करें संपादक के अंदर टैब से सरल तरीके से गज़ेबो संपादक में जोड़े जा सकते हैं:

अब देखते हैं कि रोबोट क्या देखता है।
दो पिछले टर्मिनलों को बंद किए बिना, रोबोट के विवरण के साथ rviz चलाएं:
roslaunch rosbots_description rviz.launch
और इसमें एक नया प्रदर्शन जोड़ें, जिसे "छवि" कहा जाता है:
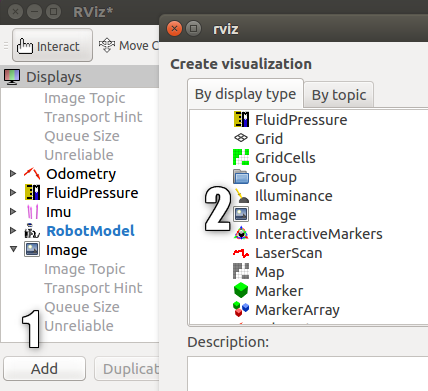
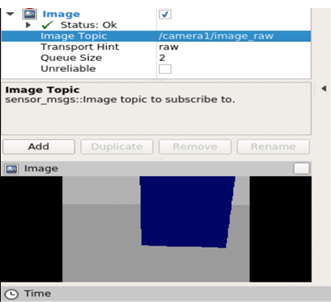
कैमरा इमेज वाला एक नया डिस्प्ले दिखाई देगा और ... गज़ेबो एडिटर उड़ जाएगा।
दुर्भाग्य से, जब VMWare छवि के साथ एक वर्चुअल मशीन पर काम करते हैं, तो वर्चुअल कैमरा से प्रसारण को जोड़ने से त्रुटि होती है।
यदि काम एक आभासी मशीन पर नहीं, बल्कि एक वास्तविक पर किया जाता है, तो हम एक कॉलम के चित्र की छवि के साथ गज़ेबो में एक आभासी कैमरे से एक छवि प्राप्त करेंगे:
अब आइए मॉडल में IMU जोड़ें।
IMU (जाइरोस्कोप)
इमू जोड़ने की प्रक्रिया एक कैमरा जोड़ने के समान है।
सबसे पहले, rosbots.gazebo.xacro खोलें और बनाएं
कोड <gazebo> <plugin name="gazebo_ros_imu_controller" filename="libgazebo_ros_imu.so"> <topicName>imu/data</topicName> <serviceName>imu/service</serviceName> <bodyName>base_link</bodyName> <gaussianNoise>0</gaussianNoise> <rpyOffsets>0 0 0</rpyOffsets> <updateRate>30.0</updateRate> <alwaysOn>true</alwaysOn> <gaussianNoise>0</gaussianNoise> </plugin> </gazebo>
हम इस कोड और टैग के भीतर जोड़े गए कैमरे के लिए कोड जोड़ देंगे
<robot></robot>
जैसा कि कोड से अनुमान लगाना मुश्किल नहीं है, यह डेटा को विषय / इमू / डेटा में प्रकाशित करेगा।
अब, यदि आप गज़ेबो में रोबोट मॉडल को फिर से रखते हैं और कमांड निष्पादित करते हैं: पड़ोसी टर्मिनल में
rostopic list , आप दूसरों के बीच इमू डेटा के साथ विषय देख सकते हैं:

आप इस पर भी नज़र डाल सकते हैं कि वह कमांड चलाकर क्या प्रकाशित करता है:
rostopic echo /imu/data -n1

संक्षेप में, imu निम्नलिखित जानकारी प्रकाशित करता है:
- अभिविन्यास: एक्स, वाई, जेड, और डब्ल्यू कुल्हाड़ियों के साथ रोबोट का उन्मुखीकरण।
- angular_velocity: रोबोट की कोणीय गति।
- linear_acceleration: रैखिक त्वरण।
थोड़ा स्पर्श हुआ
।
Rosbots.gazebo.xacro में जोड़ें सब कुछ टैग के भीतर भी है
कोड <gazebo reference="wheel_left_link"> <mu1>1.0</mu1> <mu2>1.0</mu2> <kp>1000000.0</kp> <kd>100.0</kd> <minDepth>0.001</minDepth> <maxVel>1.0</maxVel> </gazebo> <gazebo reference="wheel_right_link"> <mu1>1.0</mu1> <mu2>1.0</mu2> <kp>1000000.0</kp> <kd>100.0</kd> <minDepth>0.001</minDepth> <maxVel>1.0</maxVel> </gazebo> <gazebo reference="base_link"> <material>Gazebo/Blue</material> <mu1>0.3</mu1> <mu2>0.3</mu2> <sensor type="contact" name="bumpers"> <always_on>1</always_on> <update_rate>50.0</update_rate> <visualize>true</visualize> <contact> <collision>base_footprint_collision_base_link</collision> </contact> </sensor> </gazebo> <gazebo reference="camera_link"> <mu1>0.2</mu1> <mu2>0.2</mu2> </gazebo>
यह कोड रोबोट के अतिरिक्त मापदंडों को निर्धारित करेगा: पहियों के लिए घर्षण गुणांक, गज़ेबो में रंग, संपर्क सेंसर। रोबोट बम्पर बाधा को छूने के तुरंत बाद संपर्क सेंसर चालू हो जाएगा।
अब गज़ेबो को फिर से शुरू करें, मॉडल रखें, और rviz में पहले की तरह imu डिस्प्ले जोड़ें, कैमरे के साथ प्रदर्शन जोड़ें:

यदि सब कुछ ठीक रहा, तो हम देखेंगे कि इमू विषय में पोस्ट कर रहा है।
निष्कर्ष में, हम सिमुलेशन में रोबोट को नियंत्रित करेंगे और देखेंगे कि कैसे डेटा imu के साथ बदलता है:
पहला टर्मिनल:
roslaunch gazebo_ros empty_world.launch
2:
roslaunch rosbots_description spawn.launch
roslaunch rosbots_description rviz.launch
3:
rosrun teleop_twist_keyboard teleop_twist_keyboard.py /cmd_vel:=/part2_cmr/cmd_vel
ऑपरेशन के दौरान संभावित त्रुटियां :
1. रोबोट मॉडल गज़ेबो में दिखाई नहीं देता (पैकेज [rosbots_description] के पास कोई रास्ता नहीं है) - नज़दीकी गज़ेबो, टर्मिनल में स्रोत डेवेल / सेटअप.बैश निष्पादित करें, गज़ेबो को पुनरारंभ करें।
2।
gzserver: /build/ogre-1.9-mqY1wq/ogre-1.9-1.9.0+dfsg1/OgreMain/src/OgreRenderSystem.cpp:546: virtual void Ogre::RenderSystem::setDepthBufferFor(Ogre::RenderTarget*): Assertion `bAttached && "A new DepthBuffer for a RenderTarget was created, but after creation" "it says it's incompatible with that RT"' failed. Aborted (core dumped)
संभव समाधान (परीक्षण नहीं):
https://bitbucket.org/osrf/gazebo/issues/1837/vmware-rendering-z-ordering-appears-random