
आज हम एक स्वायत्त ड्रोन नियंत्रण कार्यक्रम को एक बॉल डिटेक्शन प्रोग्राम के साथ जोड़ रहे हैं ताकि एक स्वायत्त ड्रोन के साथ गेंद को फटा जा सके।
पिछले लेखों में, हमने एक स्वायत्त आभासी और वास्तविक ड्रोन के प्रक्षेपण की जांच की, साथ ही एक आरओएस नोड का विकास किया जो अंतरिक्ष में एक गेंद के निर्देशांक को परिभाषित और स्थानांतरित करता है । अब हम ड्रोन नियंत्रण कार्यक्रम को रीमेक करेंगे ताकि यह स्वचालित रूप से गेंद को फोड़ने की कोशिश करे।
गेंद के लिए उड़ान कार्यक्रम
गेंद के लिए उड़ान भरने वाला कार्यक्रम मैन्युअल नियंत्रण कार्यक्रम के समान गति नियंत्रण चक्र पर आधारित है।
अंतर यह है कि कीबोर्ड से नियंत्रण कुंजी के बजाय, ड्रोन वेग वेक्टर को विषय /baloon_detector/twist से प्राप्त गेंद की स्थिति के बारे में जानकारी द्वारा नियंत्रित किया जाता है।
setvel_forward गति और setvel_forward वेक्टर सेट किया जाता है ताकि ड्रोन सही गेंद में उड़ जाए।
यदि ड्रोन 0.2 सेकंड से अधिक समय तक गेंद को नहीं देखता है, तो हम मानते हैं कि हमने इसे फट दिया और ड्रोन को लैंडिंग मोड में डाल दिया।
कार्यक्रम का पूरा पाठ नीचे दिया गया है: (crash_baloon.py) डिबगिंग अनुशंसाएँ
डिबगिंग के लिए, हम एक खुली जगह चुनने की सलाह देते हैं, गेंद को आधार से जोड़ते हुए, यह सुनिश्चित करते हुए कि पास में कोई लाल वस्तुएं नहीं हैं, ताकि मार्गदर्शन कार्यक्रम की झूठी सकारात्मकता न हो।
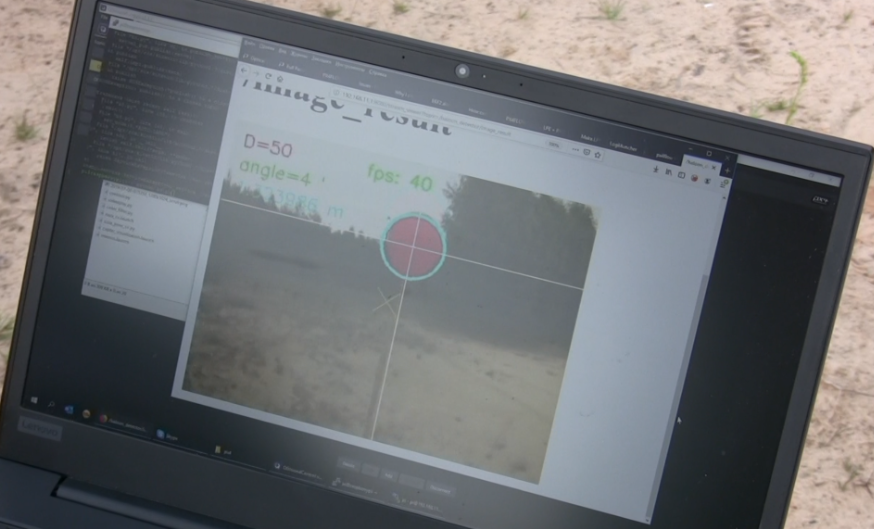
उड़ान से पहले मार्गदर्शन कार्यक्रम का संचालन, ब्राउज़र का उपयोग करके 192.168.11.1:8080 पर जाँच किया जाना चाहिए:

यदि सब कुछ सही ढंग से कॉन्फ़िगर किया गया है, तो प्रोग्राम को आत्मविश्वास से गेंद को अलग करना चाहिए और गलत सकारात्मकता पैदा नहीं करनी चाहिए।
मार्गदर्शन कार्यक्रम की शुरुआत में, यह समझा जाता है कि ड्रोन को टेकऑफ़ के बाद गेंद को देखना चाहिए। अन्यथा, ड्रोन सोचेगा कि गेंद पहले ही फट चुकी है, और लैंडिंग मोड में बदल जाएगी।
भविष्य में, आप कार्यक्रम को संशोधित कर सकते हैं - उदाहरण के लिए, AUTO.MISSION मोड का उपयोग करके गेंद के लिए एक दृष्टिकोण बनाएं। और वांछित जीपीएस बिंदु तक पहुंचने के बाद, दृश्य खोज मोड पर स्विच करें।
कार्यक्रम के मुख्य चक्र में गति के लिए गुणांक का चयन प्रयोगात्मक ड्रोन के लिए किया जाता है।
प्रतियोगिताओं में, गेंद को फोड़ने के प्रयास इस तरह दिखते थे:
मैं उन टिप्पणियों और सवालों के लिए आभारी रहूंगा, जो हमारे प्रयोग को दोहराने की कोशिश करते हैं।
कार्यक्रमों के स्रोत कोड गिथब में अपलोड किए गए हैं ।