श्रृंखला में पोस्ट:
8. हम फोन-आरओएस कंट्रोल, जीपीएस-नोड से नियंत्रित करते हैं7. रोबोट स्थानीयकरण: जीएमपी, एएमसीएल, कमरे के नक्शे पर संदर्भ बिंदु6. पहिया एनकोडर, कमरे के नक्शे, लिडार के साथ ओडोमेट्री5. हम rviz और gazebo में काम करते हैं: xacro, नए सेंसर।4. rviz और gazebo संपादकों का उपयोग करके एक रोबोट सिमुलेशन बनाएं।3. तेजी लाने, कैमरे को बदलने, गेट को ठीक करें2. सॉफ्टवेयर1. लोहापिछली बार, बजट लिडार RPlidar-A1 को स्थापित करने के बाद, हम एक कमरे का नक्शा बनाने में कामयाब रहे, ओडोमेट्री के साथ काम करें। हालांकि, रोबोट, एक नक्शा होने और ऑप्टिकल सेंसर से ओडोमेट्री को समायोजित करने के बावजूद, अभी भी पर्यावरण में असुरक्षित महसूस करता है।
बल्कि, वह उसे बिलकुल नहीं देखता। और वह दूर-दूर के नक्शे के साथ सवारी करता है, बाधाएं उसके लिए नहीं हैं। यह एक ही समय में सुखदायक और परेशान करने वाला दोनों है। एक ओर, बाधाओं के बारे में चिंता न करें और जहां भी आपकी दिल की इच्छा हो, यात्रा करें, दूसरी तरफ, दूसरे कमरे में या रसोई में जाने की संभावना नहीं है। इसलिए, हम अंतरिक्ष में रोबोट के स्थानीयकरण के बारे में बात करेंगे जो कि रॉस प्रदान करता है और साथ ही हमारे सज्जन के लिडार और एन्कोडर के सेट का उपयोग करता है। लेकिन इससे पहले कि हम सीधे स्थानीयकरण पर जाएं, एक और आरओएस पैकेज के बारे में बात करते हैं, जो आपको कमरे के 2 डी नक्शे बनाने की भी अनुमति देता है, और कभी-कभी यह पिछले पोस्ट से आरओएस पैकेज की तुलना में उसके लिए बेहतर काम करता है। Gmapping पता करें।
आरएम कबीले जीएमपी
हम मूल नहीं होंगे और हम विषय पर पहले से मौजूद हैबर लेख के घटनाक्रम का उपयोग करेंगे, लेकिन हम इसमें मौजूद जानकारी का विस्तार, अद्यतन और गहरा करेंगे। आलेख को
Laser_scan_matcher का उपयोग करके ओडोमेट्री के बिना ROS में एक मोबाइल रोबोट को स्थानीय बनाना और स्थानीय बनाना कहा जाता है ।
जोड़तोड़ का हिस्सा (अत्यधिक लोड किए गए एप्लिकेशन - rviz) कंप्यूटर पर (रोबोट के बाहर), बाकी (मोशन ड्राइवर, लिडार लॉन्च नोड) - रोबोट पर किया जाएगा।
उपरोक्त लेख के परिदृश्य के अनुसार कंप्यूटर पर ROS-kinetic के लिए Laser_scan_matcher स्थापित करें (लेख इंडिगो था):
sudo apt-get install ros-kinetic-laser-scan-matcher
अब दौड़ो।
रोबोट पर लिडार के साथ नोड:
roslaunch rplidar_ros rplidar.launch
एक कंप्यूटर पर:
roslaunch laser_scan_matcher demo.launch
* रोबोट लोड होने के बाद से हर बार मास्टर नोड शुरू होने के बाद, roscore को चलाने की कोई आवश्यकता नहीं है।
प्रारंभिक रिज में, कमरे का कचरा और उसमें कचरा दिखाई देगा:
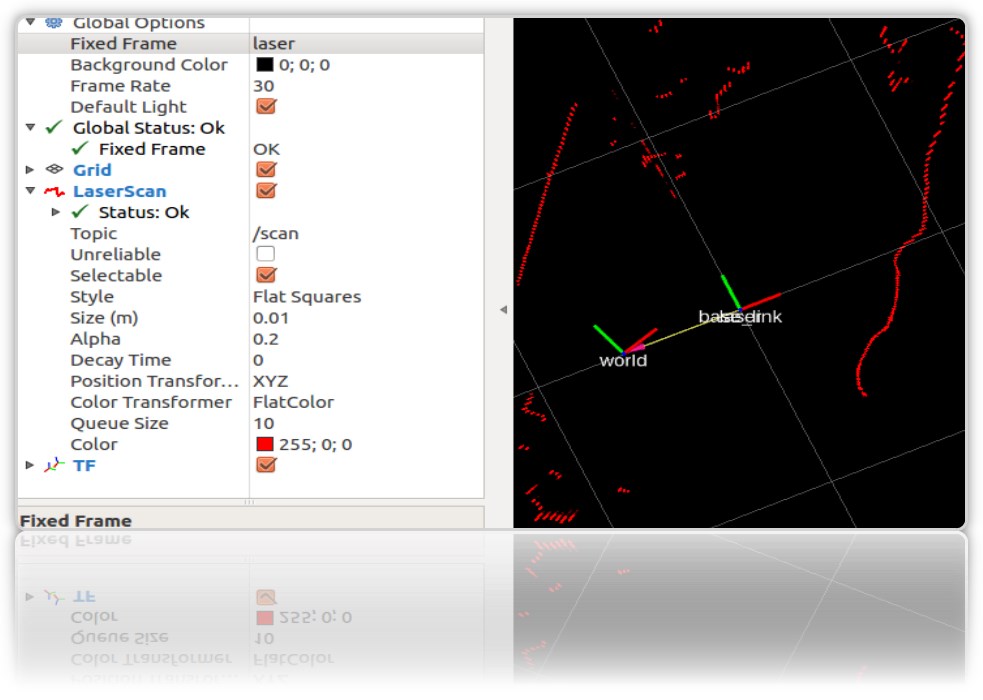
रोज़म पैकेज के साथ काम करने के लिए हमें laser_scan_matcher की आवश्यकता होगी। खुद gmping स्थापित करने की आवश्यकता नहीं है, यह पहले से ही वर्चुअल मशीन पर ROS काइनेटिक के हिस्से के रूप में है। सिस्टम में पैकेज की जाँच करें:

अब कंप्यूटर पर (रोबोट पर नहीं) गमपिंग का उपयोग करके एक लॉन्च फ़ाइल बनाते हैं, जैसा कि ऊपर दिए गए लेख में है:
roscd roscd rosbots_description/launch nano my_gmapping_launch.launch
कोड <?xml version="1.0"?> <launch> <node pkg="tf" type="static_transform_publisher" name="base_link_to_laser" args="0.0 0.0 0.0 0.0 0.0 0.0 /base_link /laser 40" /> <node pkg="laser_scan_matcher" type="laser_scan_matcher_node" name="laser_scan_matcher_node" output="screen"> <param name="fixed_frame" value = "odom"/> <param name="use_odom" value="true"/> <param name="publish_odom" value = "true"/> <param name="use_alpha_beta" value="true"/> <param name="max_iterations" value="10"/> </node> <node pkg="gmapping" type="slam_gmapping" name="slam_gmapping" output="screen"> <param name="map_udpate_interval" value="1.0"/> <param name="delta" value="0.02"/> </node> </launch>
जैसा कि आप कोड से देख सकते हैं, लेखक 3 नोड्स शुरू करता है: tf, laser_scan_matcher और gmapping।
चलो फिर से रोबोट पर लिडार चलाएं:
roslaunch rplidar_ros rplidar.launch
कंप्यूटर पर, नई बेक्ड लॉन्च फ़ाइल और rviz संपादक:
roslaunch rosbots_description my_gmapping_launch.launch
rosrun rviz rviz
Rviz में हमें एक ऐसी ही तस्वीर मिलती है जो रोबोट कार्ट के बारे में हमारी पिछली पोस्ट में मैप बनाते समय प्राप्त हुई थी। केवल इस समय gmping पैकेज काम करता है।
और मुझे मानना चाहिए, यह बुरी तरह से काम नहीं करता है। यदि हेक्टर_स्लैम ने मानचित्र पर कई कलाकृतियाँ छोड़ी हैं, जब लिडार अपनी धुरी पर घूमता है, तो इस बार लगभग कोई कलाकृतियाँ नहीं हैं:
कमरे के चारों ओर यात्राओं के बाद, निर्मित नक्शा भी सहेजा जाता है:
rosrun map_server map_saver -f map-1 , जहाँ नक़्शा -1 मानचित्र को बचाने का नाम है।
अम्मल के साथ स्थानीयकरण
मैप पर रोबोट के स्थान को निर्धारित करने के लिए उपयोग किए जाने वाले एल्गोरिदम को एएमसीएल कहा जाता है। AMCL नक्शे पर रोबोट की स्थिति को ट्रैक करने के लिए एक बहु-कण फिल्टर का उपयोग करता है। हमारे रोबोट में, हम AMCL को लागू करने के लिए ROS पैकेज (http://wiki.ros.org/amcl) का उपयोग करते हैं।
हमारे रोबोट के लिए AMCL चलाएं।
ऐसा करने के लिए, प्रोजेक्ट फ़ोल्डर में कंप्यूटर पर, एक और लॉन्च फ़ाइल बनाएं।
चलो उसे बुलाते हैं
amcl-2.launch <launch> <param name="/use_sim_time" value="false"/> <node pkg="tf" type="static_transform_publisher" name="base_link_to_laser" args="0.0 0.0 0.0 0.0 0.0 0.0 /base_link /laser 40" /> <node pkg="laser_scan_matcher" type="laser_scan_matcher_node" name="laser_scan_matcher_node" output="screen"> <param name="fixed_frame" value = "odom"/> <param name="use_alpha_beta" value="true"/> <param name="max_iterations" value="10"/> </node> <node name="map_server" pkg="map_server" type="map_server" args="/home/pi/catkin_ws/src/rosbots_description/maps/map-3.yaml"/> <node pkg="amcl" type="amcl" name="amcl" output="screen" > <param name="odom_model_type" value="diff"/> <param name="odom_alpha5" value="0.1"/> <param name="transform_tolerance" value="0.2" /> <param name="gui_publish_rate" value="10.0"/> <param name="laser_max_beams" value="30"/> <param name="min_particles" value="500"/> <param name="max_particles" value="5000"/> <param name="kld_err" value="0.05"/> <param name="kld_z" value="0.99"/> <param name="odom_alpha1" value="0.2"/> <param name="odom_alpha2" value="0.2"/> <param name="laser_min_range" value="-1"/> <param name="laser_max_range" value="-1"/> <param name="odom_alpha3" value="0.8"/> <param name="odom_alpha4" value="0.2"/> <param name="laser_z_hit" value="0.5"/> <param name="laser_z_short" value="0.05"/> <param name="laser_z_max" value="0.05"/> <param name="laser_z_rand" value="0.5"/> <param name="laser_sigma_hit" value="0.2"/> <param name="laser_lambda_short" value="0.1"/> <param name="laser_lambda_short" value="0.1"/> <param name="laser_model_type" value="likelihood_field"/> <param name="laser_likelihood_max_dist" value="2.0"/> <param name="update_min_d" value="0.2"/> <param name="update_min_a" value="0.5"/> <param name="odom_frame_id" value="odom"/> <param name="base_frame_id" type="str" value="base_link" /> <param name="global_frame_id" type="str" value="map" /> <param name="resample_interval" value="1"/> <param name="transform_tolerance" value="0.1"/> <param name="recovery_alpha_slow" value="0.0"/> <param name="recovery_alpha_fast" value="0.0"/> <param name="use_map_topic" value="true" /> <param name="first_map_only" value="true" /> </node> </launch>
कोड पूरी तरह से उल्लिखित लेख के समान है, इसके अपवाद के साथ:
- नोड को छोड़कर जो होकुयो लिडार को लॉन्च करता है (यह रोबोट पर चलता है)
- कमरे के नक्शे का पथ और नाम अलग-अलग है (मानचित्र- 3.yaml)
कोड 4 नोड चलाता है:
- tf
- map_server
- लेजर_स्कैन_मैचर
- अम्मल
Amcl नोड मैप का उपयोग करता है जो map_server बाद के रोबोट स्थानीयकरण के लिए प्रकाशित करता है।
लॉन्च फ़ाइलों को चलाएं और परिणाम देखें।
लेकिन रोबोट को:
roslaunch rplidar_ros rplidar.launch
एक कंप्यूटर पर:
पहला टर्मिनल:
roslaunch rosbots_description amcl-2.launchदूसरा टर्मिनल:
roslaunch rosbots_description rviz.launchRviz शुरू होने के बाद, इस संपादक के अगले चरण निम्नलिखित होंगे:- आरवीज़ में डिस्प्ले जोड़ें:
• लेजरस्कैन
• नक्शा
• पोसअरे
- प्रारंभिक अवस्था में रोबोट का स्थानीयकरण करें, क्योंकि जब से शुरू होता है तो यह नहीं पता होता है कि रोबोट कहाँ शुरू हुआ और यह कहाँ है। "प्रारंभिक आरंभीकरण" की आवश्यकता है।
इसके लिए, rviz में आपको "2D पोज़ एस्टीमेट" का चयन करना होगा और उस विंडो में हरे रंग के तीर का उपयोग करना होगा जहाँ रोबोट को अपनी स्थिति का संकेत करने के लिए दिखाया गया है:
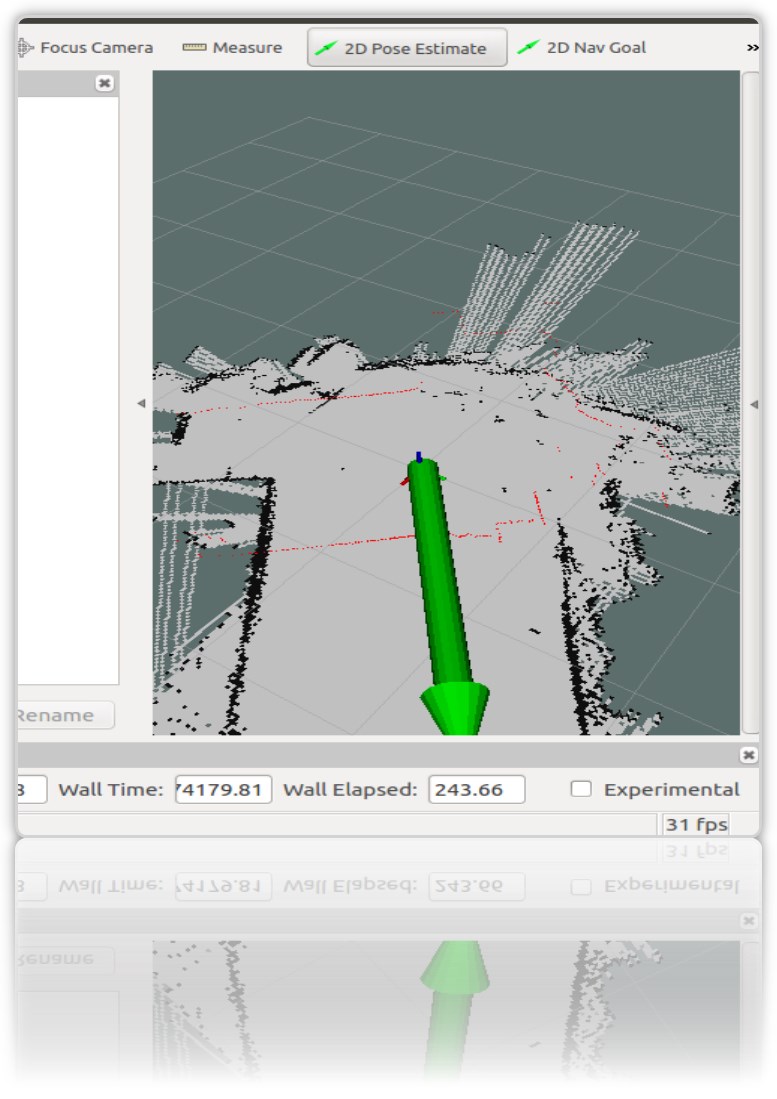
यह ऑपरेशन rviz में फ़्रेम "मैप" का चयन करके किया जाना चाहिए:
टर्मिनल में हमें रोबोट के निर्देशांक (मुद्रा) मिलते हैं:
[ INFO] [1572374324.454855505]: Setting pose (1572374324.454806): -0.014 -0.012 0.655
आप बार-बार मानचित्र पर हरे तीर का उपयोग करके नक्शे पर रोबोट की स्थिति निर्धारित कर सकते हैं।
यह वांछनीय है कि नक्शे पर लिडार (लाल सीमा) से डेटा मेल खाता है या कमरे की दीवारों के वास्तविक स्थान के करीब है:
Rviz विज़ुअलाइज़ेशन विंडो में, हमें रोबोट के चारों ओर लाल रंग के तीर दिखाई देते हैं:
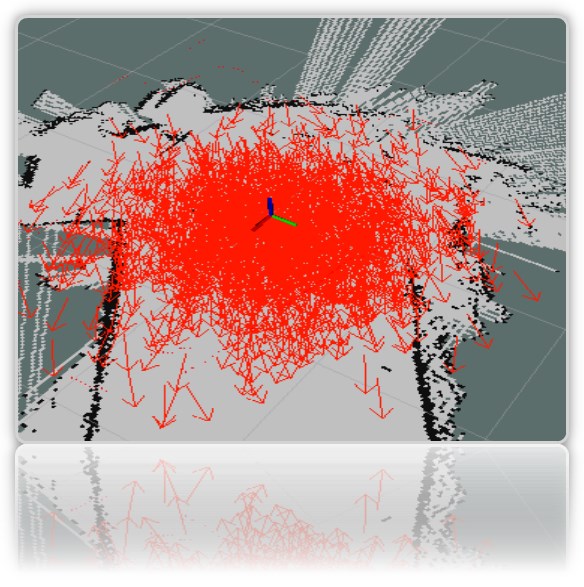
* एक रोबोट के रूप में, हमारे पास स्पष्टता के लिए एक अक्ष है (पूरे चित्रित rviz मॉडल अभी भी छिपा हुआ है)।
** यदि तीर दिखाई नहीं दिया, तो आप rviz में जोड़े गए PoseArray प्रदर्शन को हटाने और पुन: जांचने का प्रयास कर सकते हैं।
इस तथ्य के बावजूद कि हमने सीधे उस नक्शे पर संकेत दिया जहां रोबोट स्थित है, सिस्टम अभी भी मानता है कि यह उन जगहों पर हो सकता है जहां लाल तीर खींचे जाते हैं। यह मानचित्र पर रोबोट का संभावित स्थान है। बड़ी संख्या में तीर और उनके नक्शे पर बिखराव यह दर्शाता है कि सिस्टम अभी भी रोबोट के सटीक स्थान को नहीं जानता है। हालांकि, वह स्थान जहां शूटर घनी है, रोबोट की अधिक संभावना है।
सिस्टम को अधिक सटीक रूप से समझने के लिए कि रोबोट कहां है, आपको रोबोट के स्थान का निर्धारण करने वाले नोड्स के साथ एक मानचित्र पर सवारी करने की आवश्यकता है। हमारे पास इस सेट से है: लिडार और एनकोडर।
लेकिन हम केवल लॉन्च किए गए लिडार के साथ मैप पर यात्रा करते हैं, एक ही समय में यह पता लगाते हैं कि क्या केवल इसकी (लिडार) मदद से रोबोट को मज़बूती से स्थानीयकरण करना संभव है।
-
नक्शे पर रोबोट की सवारी करेंरोबोट पर:
rosrun rosbots_driver part2_cmr.py
एक कंप्यूटर पर:
rosrun teleop_twist_keyboard teleop_twist_keyboard.py /cmd_vel:=/part2_cmr/cmd_vel
यात्रा के दौरान, amcl विषय / स्कैन, / मैप, / tf पढ़ना शुरू कर देगा और विषयों / amcl_pose और / particlecloud में रोबोट के स्थान को प्रकाशित करेगा।
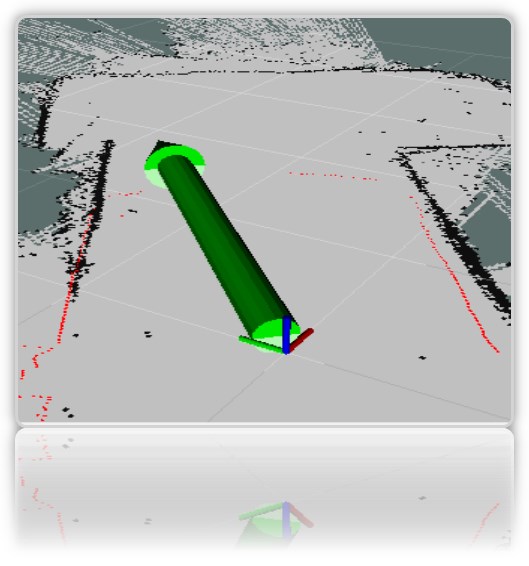
जब आप यात्रा करते हैं, तो आप देख सकते हैं कि तीरों की संख्या कम हो जाती है और वे रोबोट के वास्तविक स्थान के साथ एक बिंदु पर घनीभूत हो जाते हैं:
चित्र दिखाता है कि मॉडल कैसे यात्रा करता है (कनेक्शन के पेड़ के रूप में)। और यह भी देखा जाता है कि लिडार कमरे के अस्पष्ट सीमाओं पर स्थानीयकरण के साथ पर्याप्त रूप से सामना नहीं करता है।
अम्मल नोड कोड में अन्य मापदंडों का क्या मतलब है?
परंपरागत रूप से, उन्हें बुनियादी (सामान्य), फ़िल्टर मापदंडों (फ़िल्टर), लेजर मापदंडों (लिडार) (लेजर पैरामीटर्स) में विभाजित किया गया है।
मुख्य पैरामीटर:- odom_model_type (डिफ़ॉल्ट: "भिन्न"): यह निर्धारित करता है कि किस ओडोमेट्री मॉडल का उपयोग करना है। हमारा अंतर है, जिसका अर्थ है अंतर। "ओमनी", "अलग-सही," या "ओमनी-सही" में बदला जा सकता है।
- odom_frame_id (डिफ़ॉल्ट: "ओडोम"): फ्रेम को परिभाषित करता है (विषय को पढ़ें) जिसके साथ ओडोमेट्री जुड़ी होगी। यह आमतौर पर ओडोम विषय में प्रकाशित होता है।
- base_frame_id (डिफ़ॉल्ट: "base_link"): रोबोट के आधार के लिए फ्रेम।
- global_frame_id (डिफ़ॉल्ट: "मैप"): मैप का फ्रेम, एक नियम के रूप में मैप-सर्वर इसे मैप में विषय के रूप में प्रकाशित करता है
- use_map_topic (डिफ़ॉल्ट: गलत): यह निर्धारित करता है कि क्या विषय के माध्यम से लोड किया जाएगा या सेवा को कॉल करके (हमें याद है कि आरओएस में विषयों के अलावा, सेवाएं और क्रियाएं भी हैं।
फ़िल्टर पैरामीटरये विकल्प आपको अनुकूलित करते हैं कि कण फ़िल्टर कैसे काम करता है।
- min_particles (डिफ़ॉल्ट: 100): फ़िल्टर के लिए कणों की न्यूनतम संख्या निर्धारित करता है। हमारे पास 500 हैं।
- max_particles (डिफ़ॉल्ट: 5000): फ़िल्टर के लिए कणों की अधिकतम संख्या निर्धारित करता है।
- kld_err (डिफ़ॉल्ट: 0.01): सही वितरण और गणना किए गए वितरण के बीच अधिकतम स्वीकार्य त्रुटि सेट करता है। हमारे पास 0.05 है
- update_min_d (डिफ़ॉल्ट: 0.2): रैखिक दूरी (मीटर में) सेट करता है जिसे फ़िल्टर को अपडेट करने के लिए रोबोट को यात्रा करनी चाहिए।
- update_min_a (डिफ़ॉल्ट: pi / 6.0): कोणीय दूरी (रेडियन में) सेट करता है जिसे फ़िल्टर को अपडेट करने के लिए रोबोट को स्थानांतरित करना होगा। हमारे पास 0.5 है
- resample_interval (डिफ़ॉल्ट: 2): फिर से लाने से पहले आवश्यक फ़िल्टर अपडेट की संख्या निर्धारित करता है। हमारे पास 1 है।
- transform_tolerance (डिफ़ॉल्ट: 0.1): वह समय (सेकंड में) जिस पर प्रकाशित परिवर्तन दिनांकित होना चाहिए ताकि यह इंगित किया जा सके कि यह परिवर्तन भविष्य में मान्य है।
- gui_publish_rate (डिफ़ॉल्ट: -1.0): अधिकतम गति (हर्ट्ज में) जिस पर स्कैन और पथ विज़ुअलाइज़ेशन से प्रकाशित होते हैं। यदि यह मान -1.0 है, तो यह फ़ंक्शन अक्षम है। हमारे पास 10 हैं।
लेजर के पैरामीटर (लिडार) (लेजर पैरामीटर्स)ये पैरामीटर आपको कॉन्फ़िगर करने की अनुमति देते हैं कि लिक्विड लेजर के साथ एमक्ले कैसे इंटरैक्ट करता है।
- Laser_min_range (डिफ़ॉल्ट: -1.0): विचार करने के लिए न्यूनतम स्कैन रेंज; -1.0 लेजर रिपोर्ट में निर्दिष्ट न्यूनतम रेंज का उपयोग करेगा।
- Laser_max_range (डिफ़ॉल्ट: -1.0): विचार करने के लिए अधिकतम स्कैनिंग रेंज; -1.0 अधिकतम लेजर रेंज का उपयोग करेगा।
- Laser_max_beams (डिफ़ॉल्ट: 30): फ़िल्टर को अपडेट करते समय प्रत्येक स्कैन में कितने समान रूप से वितरित बीम का उपयोग किया जाएगा।
- Laser_z_hit (डिफ़ॉल्ट: 0.95): रोबोट मॉडल के z_hit घटक का वजन।
- Laser_z_short (डिफ़ॉल्ट: 0.1): रोबोट मॉडल के z_short घटक का वजन।
- Laser_z_max (डिफ़ॉल्ट: 0.05): रोबोट मॉडल के z_max घटक का वजन।
- Laser_z_rand (डिफ़ॉल्ट: 0.05): रोबोट मॉडल के z_rand घटक का वजन।
आइए देखें कि क्या min_particles और max_particles पैरामीटर प्रभावित करते हैं। यदि आप उनके मूल्यों को कम करते हैं, तो जब आप लॉन्च फ़ाइल लॉन्च करते हैं, तो दृश्य संपादक में कणों की संख्या स्पष्ट रूप से कम होगी।
सभी पैरामीटर एक सिमेंटिक लोड ले जाते हैं, लेकिन लेख के ढांचे के भीतर उनमें से प्रत्येक को बदलने के प्रभाव को पार्स करना मुश्किल है।
कमरे के नक्शे पर संदर्भ बिंदु
यह नाम आकर्षक है और इस विशेष क्षण में नक्शे पर रोबोट की स्थिति को दर्शाता है।
वे किस लिए हैं? यह समझने के लिए कि रोबोट कमरे में बिंदु A से रसोई में B को इंगित करने के लिए आया था।
रोबोट की स्थिति (पोज) पर डेटा को एएमसी वर्किंग नोड (ऊपर दिए गए लेख में शुरू किया गया) के साथ प्राप्त किया जा सकता है।
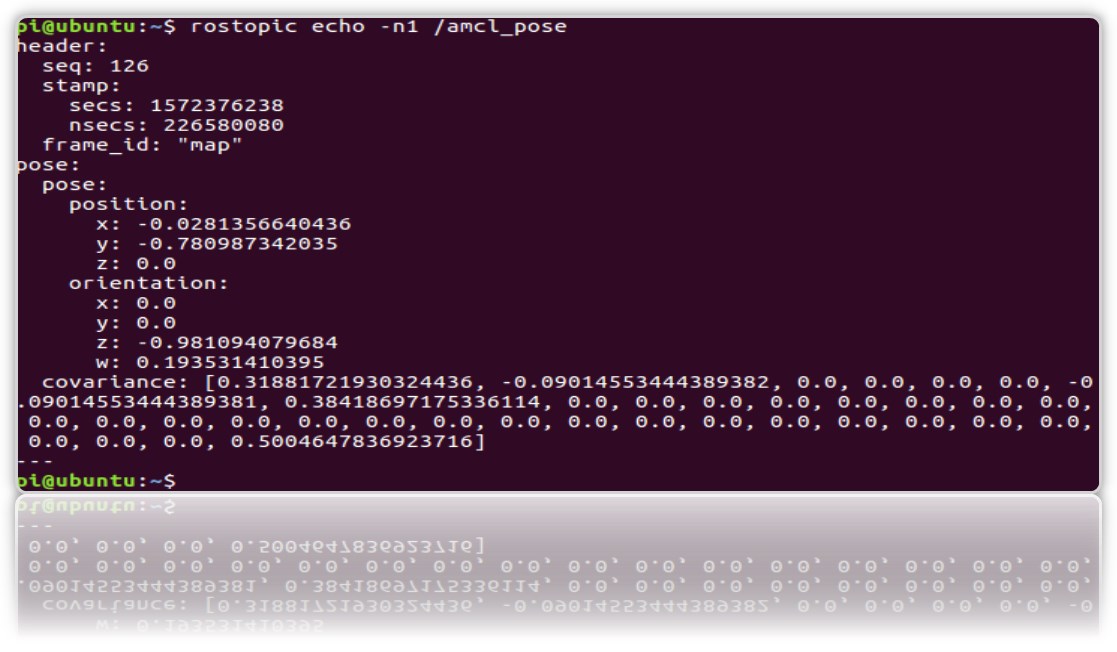
और विषय में देखें / amcl_pose:
rostopic echo -n1 /amcl_pose
* कुंजी n1 - विषय में संदेशों के प्रवाह को "ठीक करने" के लिए।
आइए एक सेवा बनाएं, जिसे जब बुलाया जाता है, तो रोबोट की स्थिति (निर्देशांक) को दूर कर देगा ताकि हर बार यह विषय में न दिखे।
1. एक नया आरओएस पैकेज बनाएँ।
cd catkin_ws/src catkin_create_pkg get_pose rospy cd get_pose/src
2. फ़ोल्डर में, फ़ाइल बनाएँ:
* यह निष्पादन योग्य chmod + x get_pose_service.py बनाने के लिए मत भूलना
3. चलो नोड कोड के साथ फ़ाइल के लिए लॉन्च बनाएँ:
cd .. mkdir launch && cd launch
नैनो
get_pose_service.launch <launch> <node pkg="get_pose" type="get_pose_service.py" name="service_server" output="screen"> </node> </launch>
4. बिल्ली के पुनर्निर्माण के लिए मत भूलना:
cd catkin_ws catkin_make
अब हम नई लॉन्च फ़ाइल सहित सब कुछ पुनः आरंभ करेंगे।
लेकिन रोबोट को:
roslaunch rplidar_ros rplidar.launch
एक कंप्यूटर पर:
1- : roslaunch rosbots_description amcl-2.launch 2- : roslaunch rosbots_description rviz.launch 3- : roslaunch get_pose get_pose_service.launch
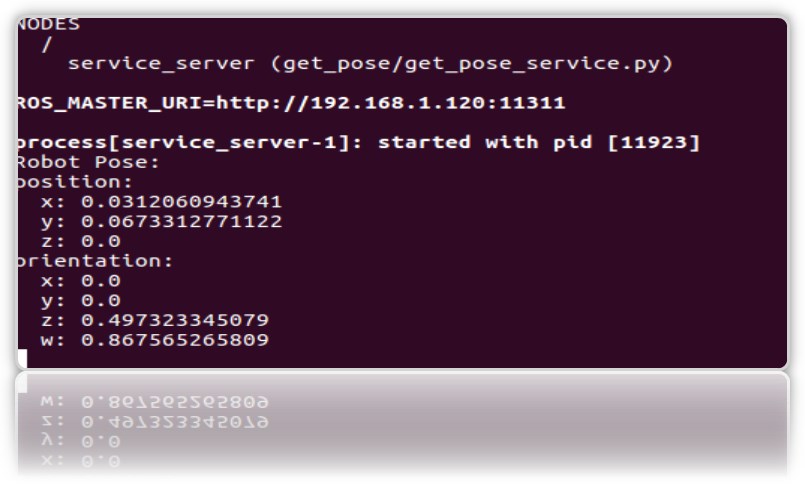
हम नई सेवा की ओर मुड़ते हैं, जो हमें मानचित्र पर रोबोट की वर्तमान स्थिति बताएगी (हम आरओएस सेवा को कॉल करेंगे):
rosservice call /get_pose_service
टर्मिनल रनिंग लॉन्च get_pose में, हमें मानचित्र पर रोबोट के निर्देशांक मिलेंगे:
संभावित त्रुटियां।
[rviz.launch] पैकेज में न तो एक लॉन्च फ़ाइल है [rosbots_description] और न ही [rosbots_description] एक लॉन्च फ़ाइल का नाम
समाधान:
cd catkin_ws source devel/setup.bash