सीज़न एक
हम एक साथ संकट से बचे ... - एक नौका पर।
(ग) मेरे मित्र
नौका के लिए न्यूनतम आवश्यक इंजन चुनने के बारे में एक लेख।एक कदम - यह सब कैसे शुरू हुआ
2014 के मध्य के आसपास, जब यह स्पष्ट हो गया कि संकट बहुत दूर हो जाएगा, फिर से हमारी खुद की संकट विरोधी योजना को लागू करने का समय आ गया। खैर, यह प्रसिद्ध फिल्म की तरह काम नहीं किया - "एक संकट है जब आप कुछ नहीं करना चाहते हैं," लेकिन कई, कई दिलचस्प घंटे थे। यॉटिंग मेरे विचार में आया। उस समय, इस मामले में मेरा ज्ञान किंडरगार्टन स्तर पर था, जब हमने अखरोट के खोल से नावें बनाईं और उन्हें पोखरों में जाने दिया। मुझे यह भी पता नहीं था कि क्या मुझे समुद्र की बीमारी है। :-) लेकिन, यह कहा जाता है - किया। एक थीम है, हम एक एक्शन प्लान लागू करना शुरू कर रहे हैं।
पहली बात यह है कि कहीं न कहीं सीखना है। मैंने यॉटसमैन से बात की। उन सभी ने यूएसएसआर के दिनों में वापस यूथ स्पोर्ट्स स्कूल में अध्ययन किया। सभी निहित लोगों ने सलाह दी कि हमें पहले तुर्की जाना चाहिए और एक चार्टर पर अलग-अलग नौकाएं लेनी चाहिए, और सीधे अभ्यास में सीखना चाहिए। ठीक है, अभी आप मामूली पैसे के लिए कर सकते हैं, "यह यहीं ले लो और यहीं मेरे साथ।" ठीक है, उन्हें समझा जा सकता है - उनके लिए यह एक व्यवसाय है। हम दूसरे रास्ते से जाएंगे।
एक निजी स्कूल में अध्ययन करने और "स्टीयरिंग सेलिंग पोत" की अतिरिक्त शिक्षा प्राप्त करने, परीक्षा उत्तीर्ण करने और अखिल रूसी संघीय दंड बल के अधिकार प्राप्त करने का निर्णय लिया गया। सीखने की पूरी प्रक्रिया इत्मीनान से शाम और सप्ताहांत में होती है। 72 घंटे के सिद्धांत + अभ्यास में 4 महीने से अधिक समय लगता है। किसी नौका को होशपूर्वक चुनने और उसे स्वयं प्रबंधित करने के लिए पर्याप्त जानकारी है।
दो कदम - एक नौका का चयन
आशा है कि मेरा चयन एल्गोरिदम दूसरों की मदद करता है:
- नौका के उपयोग के तरीके पर निर्णय लें:
- आराम, घाट से प्रस्थान नहीं;
- एक दिन चलना - सुबह निकल गया, शाम को लौटा;
- सप्ताहांत चलता है - शुक्रवार से सोमवार तक सशर्त;
- समुद्री यात्राएँ - लंबी यात्राओं के मौसम के लिए एक, दो या तीन। - न्यूनतम और अधिकतम तैराकी क्षेत्र पर निर्णय लें
- सर्दियों के भंडारण की संभावनाओं पर निर्णय लें।
शायद यही सब है। बाकी, जैसे आकार, क्षमता और अन्य चीजें खुद तय की जाएंगी। चलो देखते हैं!
मेरी पसंद का उपयोग:
- सप्ताहांत एक सप्ताह की अवधि तक चलता है। यह विकल्प शौचालय (लैट्रिन), किचन (गैली), प्रकाश व्यवस्था, पूरे परिवार के लिए आरामदायक सोने के स्थानों और आपूर्ति के लिए पर्याप्त स्थान पर मौजूदगी को निर्धारित करता है। यह तुरंत स्पष्ट हो गया कि जहाज छोटा नहीं होगा। विवरण के अनुसार - मास्को odnushka 11 sq.m.
- न्यूनतम जल क्षेत्र - टैगानगर बे और डॉन की निचली पहुंच - न केवल यात्रा मार्ग के साथ यात्रा करने के लिए, आपके पास 1 मीटर (कमर) से अधिक का ड्राफ्ट नहीं होना चाहिए। काला सागर अधिकतम जल क्षेत्र है। वास्तव में, शिपिंग के मामले में आज़ोव का सागर अधिक कपटी है। उच्च पक्षों, अच्छी स्थिरता (भारी उलटना) और आपात स्थितियों के लिए एक शक्तिशाली स्थिर मोटर होना आवश्यक है। आमतौर पर आज़ोव के सागर में, तरंग दैर्ध्य लगभग 4 -5 मीटर है, और ऊँचाई 1.5 - 2 मीटर है। छोटी लंबाई (वेवलेंथ की तुलना में) के एक पोत पर, अंतरिक्ष यात्रियों को सफलतापूर्वक प्रशिक्षित करना संभव होगा। यह लहर के सभी आकृति को दोहराएगा और अधिकतम "स्पेस" ओवरलोड के साथ अपनी टीम को घुमाएगा और टॉस करेगा।
- सड़कों पर परिवहन के बिना, यॉट क्लब में शीतकालीन भंडारण। एक बहुत महत्वपूर्ण संकेतक। वह चौड़ाई में जहाज के आयाम को बढ़ाने के लिए बस "अपने हाथों को खोल देता है"। सबसे पहले, ये आरामदायक नींद की जगहें हैं और दूसरी बात, अच्छी स्थिरता।
अगला, अपना बटुआ और इंटरनेट खोलें और बिक्री के लिए उपलब्ध विकल्पों में से मापदंडों के अनुसार चयन शुरू करें। लंबाई में 7 मीटर से अधिक, ये 24 फीट से अधिक नौका हैं। ड्राफ्ट 1 मीटर से कम है। ये 28 फीट से कम की नौका हैं। हम अपने "हरे" समुद्र में सेवा की स्थिरता और व्यावहारिकता के कारणों के लिए सेलबोट्स और समझौता नहीं मानते हैं। कौन तीन से अधिक विकल्प खोजेगा - अच्छी तरह से किया हुआ।
मैं एक और बारीकियों को नोट करना चाहता हूं, यहां, अपार्टमेंट और कारों की तरह, "स्क्वैरिटी" की डिग्री अभ्यस्तता को प्रभावित करती है। यही है, प्रत्येक अतिरिक्त 10 सेमी चौड़ाई बोर्ड पर रहने की क्षमता और आराम में काफी वृद्धि करेगी।
मैंने चुना:
25 फीट की एक
नौका, 3 मीटर की चौड़ाई, 1 मीटर की एक तरफ की ऊँचाई, 6 की बर्थ, 0.9 मीटर का एक मसौदा - साइड रोलिंग को कम करने और मोटर स्थापित करने की संभावना के साथ। डिफ़ॉल्ट रूप से नौका पर उसके लिए कोई विशेष स्थान नहीं है।जबकि चयनित नौका को शिपयार्ड में बनाया जा रहा है, तीसरा चरण शुरू होता है।

चरण तीन - उपयोग की जगह पर परिवहन
यातायात पुलिस के लिए Oversized कार्गो परिवहन सबसे महत्वपूर्ण फीडर है, क्योंकि ट्रकिंग को बाहर रखा गया है, हम अपने दम पर ड्राइव करेंगे।
यह हास्यास्पद है, लेकिन हमारे देश में, वीएफपीएस के अधिकार एक नाव का उपयोग करने का अधिकार देते हैं, लेकिन नाव नहीं। नाव पर अधिकार प्राप्त करना एक नया अप्रत्याशित कार्य है। मैं एक ही परीक्षा पास करता हूं, लेकिन अब जिम्स में।
एक मोटर के बिना डॉन के नीचे एक नौका ड्राइविंग एक अनुभवी कप्तान के लिए भी एक अजीब खोज में बदल जाती है। मोटर के साथ समस्या को हल करना आवश्यक है और, अधिमानतः, न्यूनतम बजट के साथ।
चरण चार मोटर चयन
चयन मानदंड:
वैकल्पिक हल
- बजट - 15 हजार रूबल तक;
- स्वायत्तता की सीमा कम से कम 10 मील है;
- गति - ताकि आप जहाज को चला सकें - 1.5 से अधिक समुद्री मील;
- निलंबित कर दिया।
स्थायी समाधान
- स्थिर;
- स्वायत्तता की सीमा 20 मील से अधिक है;
- गति - 5 समुद्री मील तक।
ठीक है, स्थायी समाधान के लिए कोई पैसा नहीं है, मैं इसे भविष्य के लिए छोड़ दूंगा। अभी के लिए, न्यूनतम पर ध्यान केंद्रित करें।
मुझे क्या चाहिए?
नौका के पतवार की रूपरेखा तैयार करना। उच्च सटीकता मायने नहीं रखती है। आप इसे जहाज के पासपोर्ट से या विज्ञापन पुस्तिका से भी ले सकते हैं।
अद्भुत मुफ्त
फ्रीशिप सॉफ्टवेयर डाउनलोड करें।
आयामी ड्राइंग से अनुमानों के अनुसार, मैं कार्यक्रम में एक पतवार प्रोफ़ाइल खींचता हूं और एक टोइंग विशेषता प्राप्त करता हूं।

आश्चर्यजनक रूप से, 100 W से कम की शक्ति वाली एक मोटर न्यूनतम आवश्यकताओं को पूरा करने के लिए पर्याप्त है, जो 1/7 हॉर्स पावर से कम है! यहाँ, कोई भी मोटर करेगा! लेकिन शैतान विवरण में है।
न्यूनतम इंजन खोजने के रास्ते के साथ आगे बढ़ते हुए, मुझे उच्च गति वाले गैसोलीन "मावर्स" को छोड़ने के लिए मजबूर किया जाता है। आरपीएम पर गैसोलीन इंजन की शक्ति की निर्भरता को लगभग 5500-6000 आरपीएम के अधिकतम बिंदु के साथ एक अवरोही पेराबोला द्वारा वर्णित किया गया है। पहले से ही 3500 आरपीएम पर, बिजली आधे से कम हो जाती है, और 1000 गुना से। कम-शक्ति मोटर्स पर, एक 2.25: 1 गियरबॉक्स स्थापित होता है, लगभग 20 सेमी के व्यास के साथ एक स्क्रू। 2700 आरपीएम से शोर और बुलबुले के अलावा कुछ भी उम्मीद नहीं की जा सकती है। इंजन पावर की अनुमानित गणना निम्नलिखित सूत्र के अनुसार की जा सकती है:
N=0.4∗D4∗n2∗va=1.4hp,
दक्षता केवल 10% होगी।
आपको कुछ धीमा, शांत और बदबूदार नहीं होना चाहिए।
समाधान सरल और सुरुचिपूर्ण था - एक चीनी इलेक्ट्रिक ट्रोलिंग मोटर। चीनी ने हमारे व्यावसायिक स्कूलों में इलेक्ट्रीशियन के रूप में अध्ययन किया, क्योंकि इंजन की गति 0.4 या 0.8 ओम की श्रृंखला प्रतिरोध या दोनों को एक साथ जोड़कर समायोजित की जाती है। पूरे nmax की अधिकतम घूर्णी गति = 1300 प्रति मिनट। औसत डीसी मोटर की दक्षता आमतौर पर 85% की सीमा में है। चूंकि गति को चरणबद्ध रूप से नियंत्रित किया जाता है, इसलिए गणना प्रत्येक गति के लिए अलग से की जानी चाहिए।
मैं मोटर के हैंडल को हटा दूंगा; फिर भी, आप उस तक नहीं पहुंच सकते। मैं तारों को इंजन कंट्रोल यूनिट (ईसीयू) तक ले जाऊंगा।
एक सरल तकनीक का उपयोग करते हुए, मैं स्क्रू पैरामीटर निर्धारित करता हूं। मैं एक रस्सी और एक शासक के साथ स्टोर पर जाता हूं और सरल माप करता हूं - पेंच की पिच है
H=2.r·(h/l) :
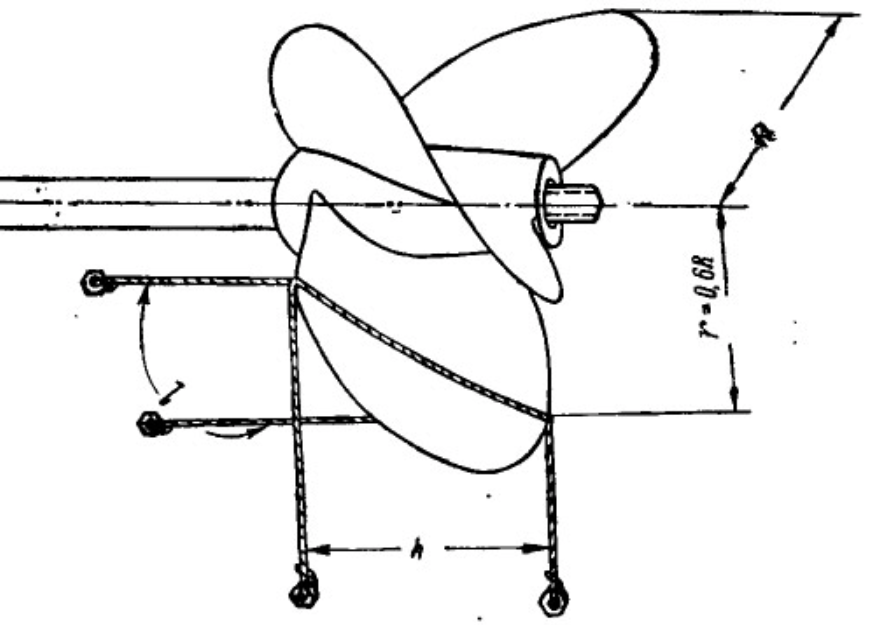
चीनी नाव इलेक्ट्रिक मोटर के प्रोपेलर के मापा पैरामीटर: डी = 0.24 मीटर; एच = 0.106 मी।
पेंच व्यास केवल 24 सेमी है और इसलिए एक भारी नौका पर इस तरह के इंजन की दक्षता भी जगह नहीं है। मैं आकलन करने की कोशिश करूंगा कि कितना।
मैं लेखों से गणना का उपयोग करूंगा (
"नाव के प्रचारकों के मुख्य तत्वों की गणना" पत्रिका "नाव और नौकाओं" 1/1963 और "आपको प्रोपेलर के बारे में क्या जानने की आवश्यकता है?" "नावों, नावों और मोटरों के लिए गाइड। जी.एम. नोवाक द्वारा संपादित )
" ट्रोलिंग मोटर के मूल्यों और आकारों को वहां रखकर। पाठ्यक्रम की सटीकता छोटी होगी, क्योंकि तर्क गणना की सीमा की स्थिति में नहीं आते हैं। लेकिन मुझे उम्मीद है कि यह मूल्यांकन के लिए उपयुक्त है।
प्रत्येक मोटर गति के लिए, गणना-प्रतिस्थापन को अंजाम देना आवश्यक है जब तक कि प्रोप स्टॉप पोत के कुल प्रतिरोध के बराबर न हो। यही है, कुछ गति से दो बलों - मोटर बलों और प्रतिरोध बलों का संतुलन आएगा।
एक उदाहरण के लिए मैं केवल अंतिम प्रतिस्थापन के लिए गणना दूंगा।
शुरू करने के लिए, संबंधित प्रवाह के गुणांक की गणना की जाती है:
w=0.165∗kop∗ sqrt frac sqrt[3]VD=$0.64
जहां कोप समग्रता का गुणांक है, और V पोत का विस्थापन है। मुझे ये पैरामीटर "हाइड्रोस्टैटिक्स" से फ़्रीशिप प्रोग्राम में मिलते हैं; डी - मीटर में पेंच व्यास।
अगला, मुझे वह गति मिल रही है जिस पर प्रोपेलर पानी से मिलता है:
va=v∗(1−w),=1.12m/s,
v = 1.2 मीटर / सेकंड - पोत की गति (2.35 समुद्री मील)।
नौका में ललाट प्रक्षेपण क्षेत्र के अनुपात में ललाट वायु प्रतिरोध होता है। चलते समय, एक हेडविंड उठता है और आंदोलन के लिए अतिरिक्त प्रतिरोध बनाता है। इसके अलावा, यह सरल तकनीक मुझे यह निर्धारित करने की अनुमति देती है कि किस हेडविंड के लिए मोटर उपयोगी हो सकता है।
मैं एक हवा के प्रतिरोध की गणना करूंगा:
रिविंड=0.61∗एसआरईफ़∗(v+vwind)2=2.6एन,
पवन घटाव के साथ = 0 मीटर / सेकंड,
जहां Sfr पाल का ललाट क्षेत्र है (हम फ्रीशिप से लेते हैं), v = 1.2 m / s पोत की गति।
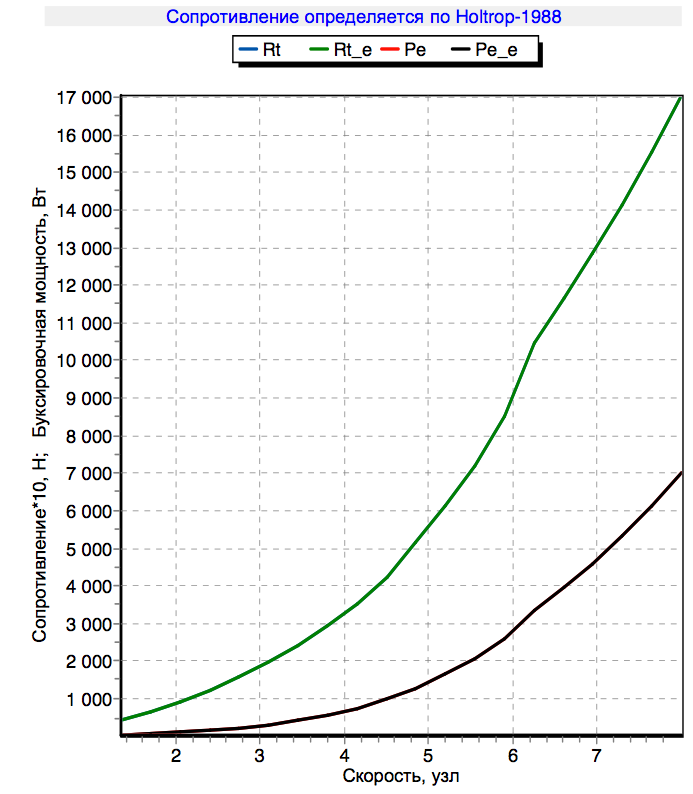
जल प्रवाह के लिए पतवार का प्रतिरोध रॉलिंग विशेषता Rw = 118.87 N से पाया जाता है।
मुक़ाबला
R=Rwind+Rw=121.5N हवा से घटकर = 0 मी। / से
नेट आंदोलन पर खर्च की गई शुद्ध शक्ति:
Pfield=va∗(Rw+Rwind)=145.8W.
मैं पेंच को आपूर्ति की गई शक्ति की गणना करूंगा:
Pel= fracImax∗nnmax∗(Uakk− fracImax∗nnmax∗(K∗0.4+0.15∗ fracUaxImax)=509डब्ल्यू,
जब K = 0, जहां K मान ले सकता है: 0 - उच्चतम गति, 1 - औसत गति, 2 - कम गति।
मैं सहायक गुणांक की गणना करता हूं:
Kn′= fracva sqrtn∗ sqrt[4] frac735∗p∗vaPel=0.87,
जहां n पेंच, आर / एस की घूर्णी गति है; p पानी का द्रव्यमान घनत्व (102 kgfs2 / m4) है।
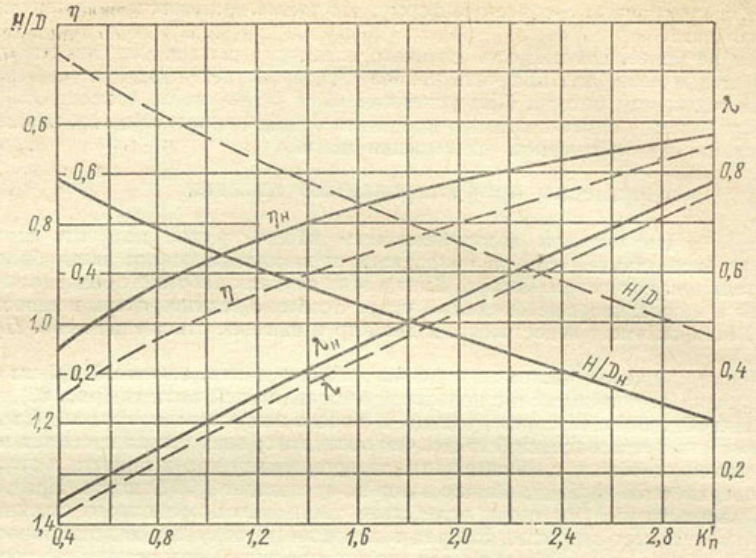
बिंदीदार ग्राफ के अनुसार, मुझे पेंच दक्षता मूल्य लगता है
eta=$0.2 ; डिस्क अनुपात
H/D=$0.5 और रिश्तेदार चलने
lambda=$0.2 ।
सत्यापन के लिए, हम वास्तविक गणना करते हैं
EFFICIENCY=पपोट/=0,243 । खैर, यह सच लगता है।
अनुशंसित पेंच व्यास और पिच
Drec= fracva lambda∗n=0.215m ।
Hrec=H/D∗Drec=0.127mHrec=H/D∗Drec=1212 ।
इसका मतलब यह है कि असली पेंच में काफी इष्टतम आयाम नहीं हैं, क्योंकि गणना की तुलना में वास्तविक दक्षता कम है।
प्रोप स्टॉप सूत्र द्वारा 1.2 m / s (2.35 समुद्री मील) की चयनित नौका गति से निर्धारित किया जाता है:
पेंच=9.8∗75∗रिले∗पेंचदक्षता/(735.5∗वीए)=121.5एन,
पूर्ण प्रतिरोध पर
R=Rwind+Rw=121.5N । संतुलन हो गया है।
नतीजतन, हम पाते हैं कि सर्वोत्तम परिस्थितियों में, एक मोटर-प्रोपेलर-यॉट सिस्टम (जिसे शायद एक प्रणोदक गुणांक कहा जाता है) की दक्षता 24% से अधिक होगी, और 600 डब्ल्यू की शक्ति वाली एक इलेक्ट्रिक मोटर नौका को 2.35 समुद्री मील तक तेजी लाएगी।
परिणाम "ऐसा-तो" है, लेकिन एक अस्थायी समाधान के लिए उपयुक्त है।
निर्माता नौका पर गहरी निर्वहन बैटरी 12V 160Ah स्थापित करता है। अधिकतम गति पर मोटर चालू 49.9 ए होगी। यह 0.25C है। पूरी क्षमता का उपयोग नहीं किया जा सकता है, मैं निर्धारित करता हूं कि आप कितना कर सकते हैं।

यही है, बैटरी लगभग 2.82 घंटे, या लगभग 2.82 * 2.35 = 6.64 मील की दूरी पर शांत गति से अधिकतम गति तक चलेगी। बैटरियों के निर्वहन के लिए आंशिक रूप से क्षतिपूर्ति करने के लिए, सौर पैनलों को स्थापित करना आवश्यक है।
नौका पर ज्यादा खाली जगह नहीं है। सब जगह कुछ न कुछ पड़ा है या कोई बैठा है। रियर लॉकर के कवर पर बैटरी स्थापित करने के लिए सबसे हानिरहित जगह। यह स्थान पाल द्वारा छायांकन के लिए कम से कम अतिसंवेदनशील है। सच है, वहां का क्षेत्र छोटा है। 1000 W / m2 के विकिरण के साथ 40 W की एक घोषित शक्ति के साथ 545x415 मिमी की बैटरी लॉकर्स के ढक्कन पर बन जाती है।

दक्षता बढ़ाने के सवालों को भविष्य के लिए छोड़ दिया जाएगा। जबकि मैं सबसे सस्ता सोलर पीडब्लूएम कंट्रोलर लेता हूं।
सौर पैनल कितने मील जोड़ेंगे?
नेविगेशन अवधि के दौरान इस क्षेत्र में सौर विकिरण की औसत दैनिक ऊर्जा 5.8-6 kW * h / m2 है। यह दिन में 10 से 12 घंटे के लिए औसतन 500 वाट है।
दो बैटरी का क्षेत्र 2X0.545X0.415 = 0.45 एम 2 है। मैं यह धारणा बनाऊंगा कि बैटरी का वर्तमान रैखिक रूप से सौर विकिरण की शक्ति पर निर्भर करता है, और वोल्टेज, इसके विपरीत, स्वतंत्र रूप से अभ्यास करता है। यह शेड्यूल पर दिखाई दे रहा है।

1000 डब्ल्यू / एम 2 पर, बैटरी 2.05 ए का वर्तमान देती है, और 500 डब्ल्यू / एम 2 पर यह 1 ए से थोड़ा अधिक देगी।
PWM नियंत्रक का उपयोग करते समय, बैटरी पर वोल्टेज बैटरी पर वोल्टेज के लगभग बराबर होता है, अर्थात। कुल, डिस्चार्ज विशेषताओं को देखते हुए, औसत 2.05X6 = 12.3 वी।
नतीजतन, दो बैटरी कम से कम 10X2 = 20 आह प्रति दिन देगी, जो 20 / 49.9 * 2.35 = 94 मील होगी।
मैं संक्षेप में बताऊंगा
अधिकतम शांत गति = 2.35 समुद्री मील,
अधिकतम गति पर सीमा = 0.94 + 6.64 = 7.58 मील,
अधिकतम स्ट्रोक पर दक्षता = 24.3%,
औसत गति के साथ शांत = 1.4 समुद्री मील,
मध्यम गति पर रेंज = 15.54 मील,
औसत गति पर दक्षता = 18.8%,
न्यूनतम गति न तो कोई लाभ देती है, न ही रेंज में और न ही दक्षता में,
7.1 m / s की अधिकतम हवा की गति 1 गाँठ होगी,
अधिकतम गति पर 7.1 मीटर / सेकंड की हवा के साथ सीमा 2.82 मील होगी,
7.1 मीटर / सेकंड की हवा के साथ अधिकतम गति पर दक्षता 11% होगी,
सौर प्रणाली की दक्षता लगभग 2A * 12.3V * 10 घंटे / 0.45 m2 / 5.8 kW * घंटे = 9.4% है।
हम रास्ते के मुख्य भाग के लिए पाल का उपयोग करेंगे, और हम इंजन को एक शंटिंग के रूप में उपयोग करेंगे और थोक वाहक और टैंकरों से फेयरवे से बच जाएंगे। हालांकि परिणाम योजना से भी बेहतर है।
यह निर्णय लिया गया कि इस विन्यास में नौका स्लिपवेज को छोड़ देगी।
यह लंबे समय से प्रतीक्षित दिन आखिरकार आ गया है। नौका को सबसे पहले पानी में उतारा जाता है।
पुनश्च इस विन्यास में, नौका 3 साल तक चली। इस समय के दौरान, वह बैटरी को चार्ज करने के लिए केवल दो बार किनारे से जुड़ा था।
अद्भुत अनुभव जमा हो गया है, और सभी गणनाओं को अभ्यास द्वारा बार-बार पुष्टि की गई है। इसके अलावा, जब नौकायन, एक डूबा हुआ इंजन जनरेटर में बदल जाता है और बैटरी चार्ज करता है। 3 नॉट्स की गति पर आवेश धारा 2A है।