प्रागितिहास
गर्म गर्मी समाप्त हो रही थी, गर्म सौम्य समुद्र पर एक अद्भुत पारिवारिक छुट्टी थी, और ग्रे कार्यदिवस की रूपरेखा पहले से ही दिखाई दे रही थी। शरद ऋतु के अवसाद का शिकार न होने के लिए, कुछ सुखद और उपयोगी करना जरूरी था, और यह कुछ लंबा नहीं हुआ: बड़े बेटे को स्कूल सम्मेलन के लिए तैयार करना पड़ा। काम का विषय पहले से ही लंबे समय तक हवा में लटका हुआ है। मैं Neoprog लेखक "खरोंच से हेक्सापोड का विकास" द्वारा प्रकाशनों का बहुत रुचि के साथ अनुसरण कर रहा हूं। और यह उनके लेख थे जिन्होंने हमें इस दिशा में काम करने के लिए प्रेरित किया।
डिज़ाइन
ड्राइविंग संरचनात्मक तत्वों के रूप में, हमने MG-996R सर्वो को चुना। दावा की गई विशेषताओं में से, उनके पास अपेक्षाकृत कम लागत पर काफी उच्च और बिजली की विशेषताएं हैं। इस सर्वो ड्राइव के आयाम और डिजाइन ने रोबोट के आगे के डिजाइन के लिए आधार बनाया, जिसे हमने मूल रूप से 3 डी प्रिंटिंग का उपयोग करके प्लास्टिक बनाने की योजना बनाई थी।
पहला कदम एकल अंग के कार्यशील प्रोटोटाइप को बनाना और परीक्षण करना था।

3 डी मॉडलिंग कार्यक्रमों में कोई अनुभव नहीं होने पर, हमने विंडोज 10 में निर्मित 3 डी बिल्डर एडिटर का उपयोग करके अपने पेपर स्केच को त्रि-आयामी मॉडल में बदलने का फैसला किया। अपनी सभी सादगी के लिए, इस संपादक के पास एक व्यापक शस्त्रागार है और आपको काफी जटिल 3 डी-मॉडल बनाने की अनुमति देता है।
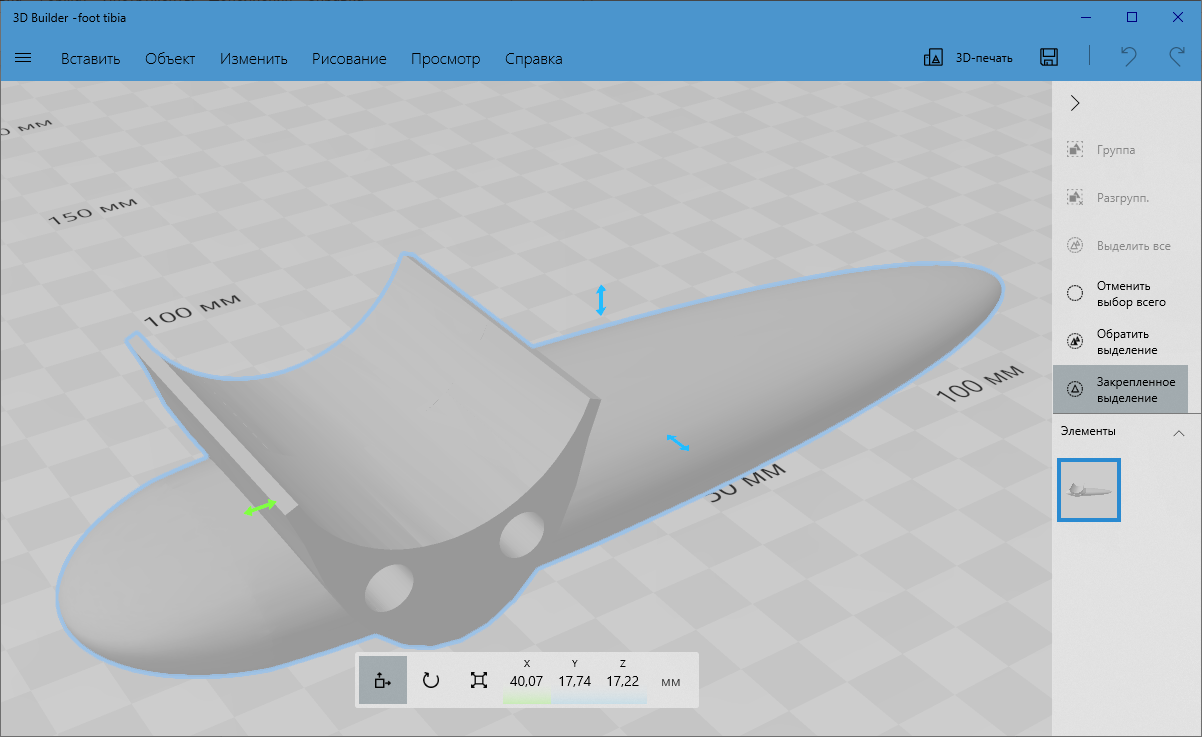
लेकिन इस संपादक में काम करने की सरलता भी इसका कमजोर बिंदु है। मॉडल में कोने की संख्या पर नियंत्रण की कमी इस तथ्य की ओर ले जाती है कि बार-बार कतरन और ग्लूइंग के बाद, एक साधारण दिखने वाला मॉडल पॉलीगनों
की संख्या के
साथ एक
विशाल आंतरिक दुनिया शुरू होता है और संपादक मॉडल के कुछ प्रकार के आंतरिक विभाजन करना शुरू कर देता है, जिससे आप केवल कुछ को संपादित करने की क्षमता के बिना अपनी रचना पर विचार कर सकते हैं।
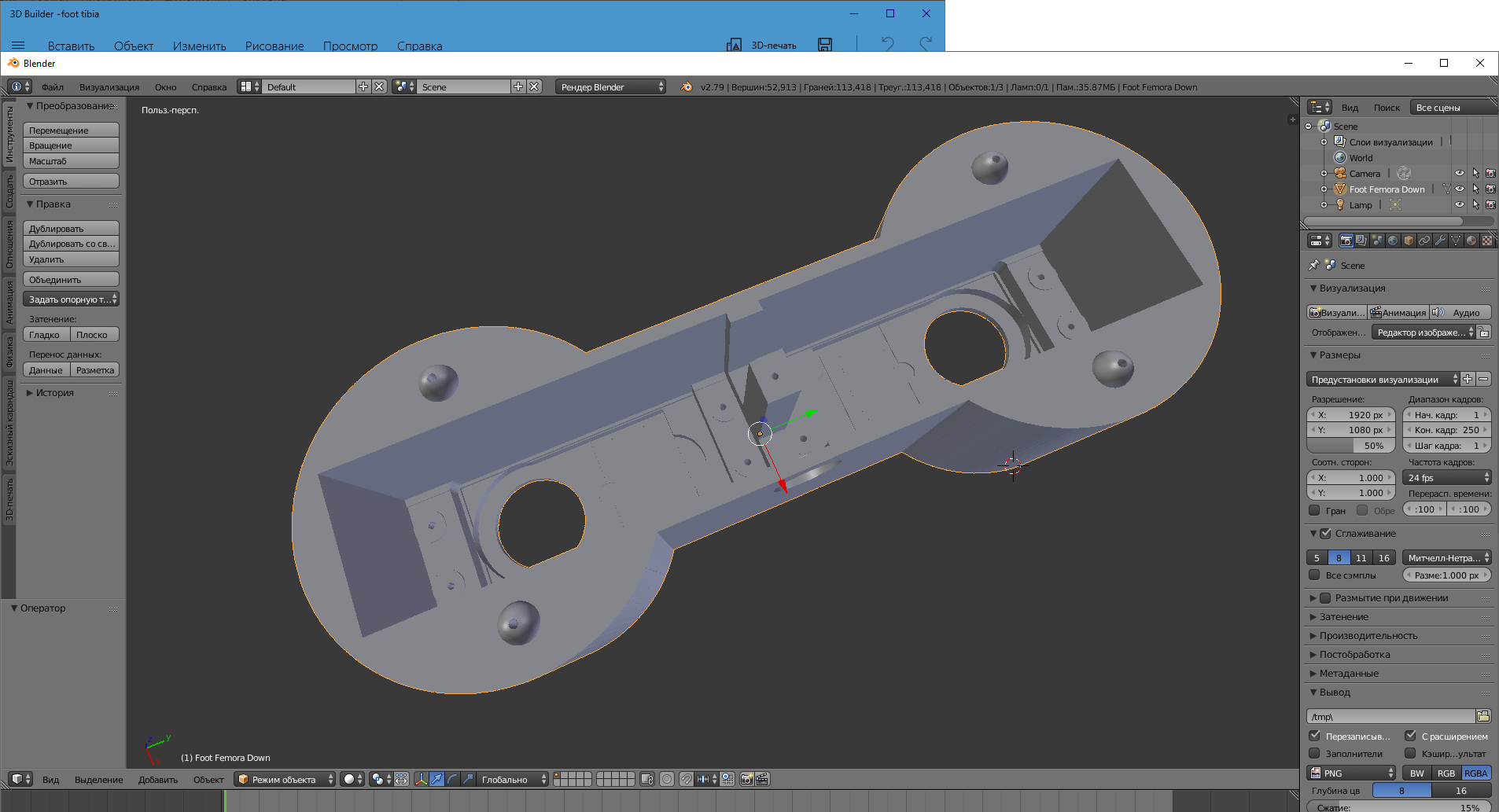
उपलब्ध संपादकों के त्वरित विश्लेषण के बाद, यह अपनी स्वतंत्र
और समझदारी के कारण ब्लेंडर का उपयोग करने के लिए प्रथागत था और इस तथ्य का कि मैंने इसे कई बार अध्ययन करने का उपक्रम किया और सभी प्रयास विफलता में समाप्त हो गए। इस बार, एक विशिष्ट लक्ष्य की उपस्थिति ने फल पैदा किया है। संपादक में न्यूनतम, लेकिन पर्याप्त कौशल वश में था और हमने विकास जारी रखा। मैं यह नोट करना चाहूंगा कि भविष्य में हमने 3 डी बिल्डर में काम करने से पूरी तरह से इंकार नहीं किया। यह अभी भी मॉडल में कुछ परिष्करण क्रियाओं को करने के लिए बहुत अधिक सुविधाजनक है: पेंच छेद बनाएं, जटिल आकार के आंतरिक गुहाओं को काटें, और बहुत कुछ।
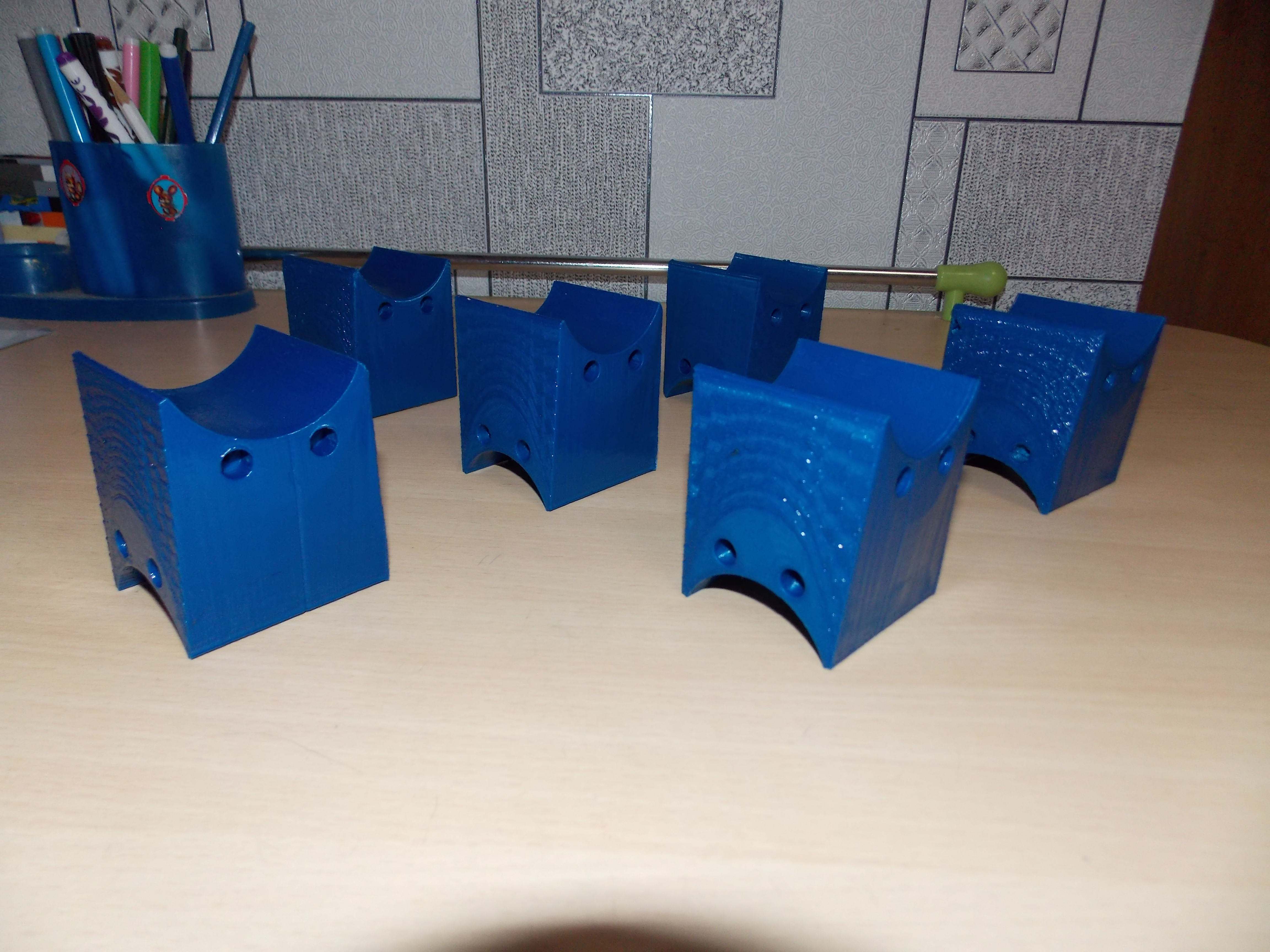
अंगों को डिजाइन करते समय, हम बाड़े के अंदर सर्वो को छिपाने का कार्य निर्धारित करते हैं। सामान्य तौर पर, यह संभव था, लेकिन जोड़ों को झुकाते समय यांत्रिक प्रभाव को कम करने के लिए सभी समान, छोरों को बाहर छोड़ना पड़ा। डिजाइन के साथ आपको लगभग 0 - 180 डिग्री की अधिकतम सीमा में जोड़ों के आंदोलन की स्वतंत्रता बनाए रखने की अनुमति मिलती है। घर्षण और पहनने को कम करने के लिए, प्रत्येक संयुक्त में एक असर प्रदान किया जाता है।

छपाई के लिए, हमने Infintary 3D Printer का इस्तेमाल किया, जिसे कुछ साल पहले “स्वर्ग के नीचे” में खरीदा गया था। प्रक्रिया केवल इत्मीनान से होती है, इसलिए अंगों के पूरे सेट को प्रिंट करने में एक दिन से अधिक समय लगा।

इस समय के दौरान, हमने एक स्केच बनाया और फ्रेम का एक 3 डी मॉडल बनाया, जिससे अंगों को संलग्न किया जाना चाहिए। यह कंधे के जोड़ों के सर्व को भी होस्ट करता है।

छपाई और संयोजन
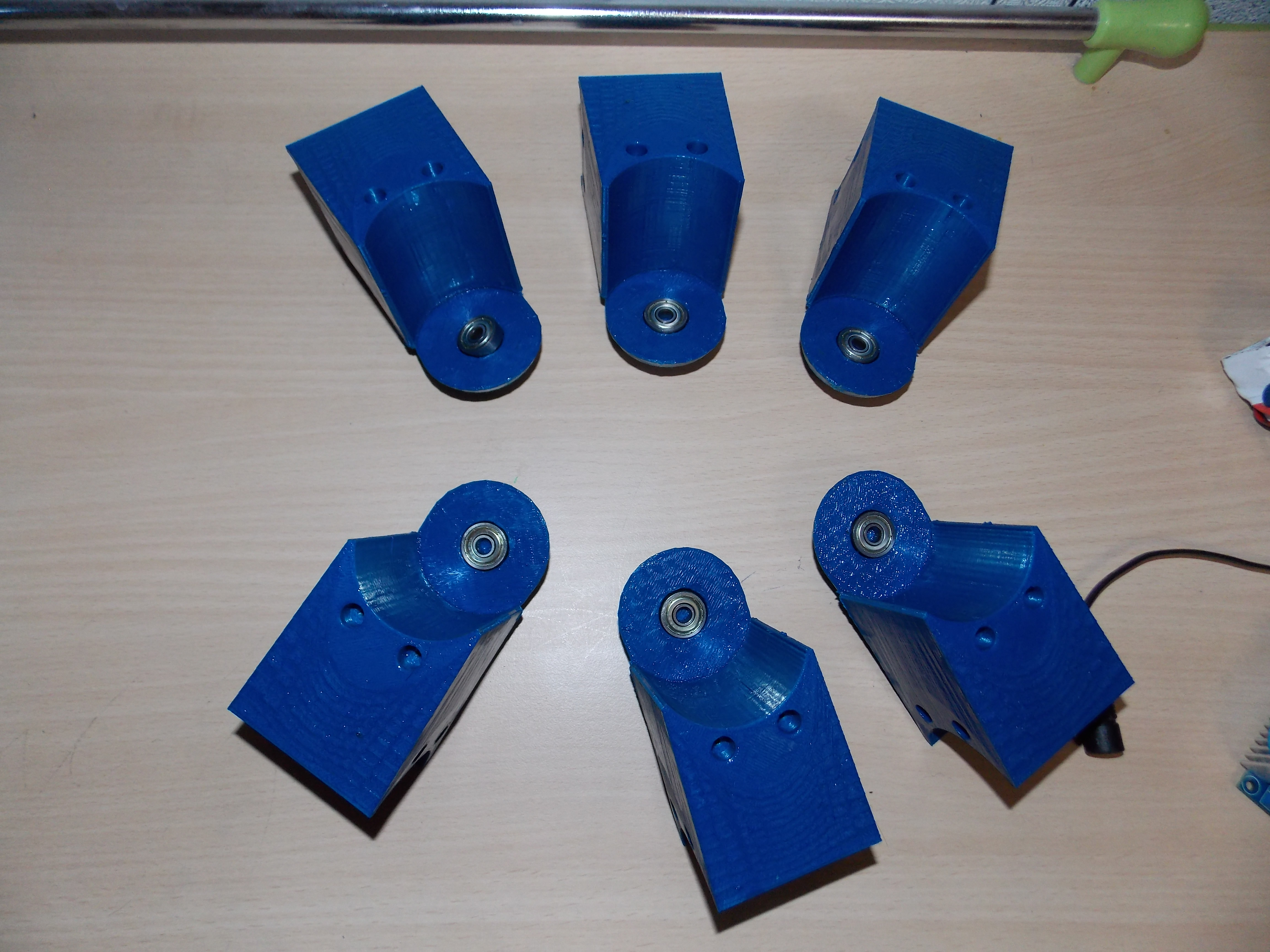
मुद्रण पूर्ण होने के बाद, हम अंगों और अंतिम कोडांतरण को सेट करते हैं। एक असंतुष्ट संस्करण में, एक प्रकार का निर्माण निकला:



जब कोडांतरण होता है, तो मुख्य बात यह नहीं है कि सर्वो के बीयरिंग और कर्षण को सम्मिलित करना भूल जाए।

एक महत्वपूर्ण बिंदु: विधानसभा के समय, सभी सर्वो को मध्य स्थिति में लाया जाना चाहिए। कंधे के जोड़ों की स्थिति को जांचने के लिए, हमने एक विशेष स्टैंसिल को मुद्रित और सब्सिडी दी।


नतीजतन, हमें एक बहुत अच्छा छह-पैर वाला प्लेटफ़ॉर्म मिला, जिसके पुनरोद्धार ने हमारे आगे के सभी अवकाशों पर कब्जा कर लिया।

इलेक्ट्रॉनिक भरने
इस समय तक, रोबोट को पुनर्जीवित करने के लिए इलेक्ट्रॉनिक भरने का मुख्य सेट संकलित किया गया था और कर्मचारियों को दिया गया था। इसमें तैयार घटक शामिल हैं, अर्थात्:
- Arduino UNO + WiFi R3 ATmega328P + ESP8266 मुख्य नियंत्रक
- समायोज्य स्टेबलाइजर्स डीसी / डीसी मैक्स 9 ए 300 डब्ल्यू - 6 पीसी।
- उच्च-वर्तमान बैटरी HG2 18650 3000 mAh - 3 पीसी।
- प्रभारी नियंत्रक बीएमएस 3 एस 11.1 वी 12.6 वी 40 ए
- I2C बस द्वारा संचालित 18 सर्वो के साथ मल्टीसर्वो शील्ड।
ऑफ-द-शेल्फ घटकों के उपयोग ने रोबोट के आकार को नकारात्मक रूप से प्रभावित किया। हमें मुख्य फ्रेम के ऊपर एक दूसरा टीयर बनाना था, जिसमें हमने स्टेबलाइजर्स और एक सर्वो शील्ड रखा था।

Arduino बोर्ड और
छत पर बसा पावर सिस्टम बिल्डिंग के तीसरे टीयर में स्थित है। हम यहाँ जोड़ने की योजना बनाते हैं ऑलिड के कुछ जोड़े अनुकरणीय आँखें, एक माइक्रोफोन, एक कैमरा और एक दूरी सेंसर।

वर्तमान में, अधिकांश नियोजित कार्य हमने पूरे कर लिए हैं। "हेक्सा" (जैसा कि हमने इसे अपने रोबोट के बेटे के साथ कहा था) बनाया गया है और इसे टेलनेट या एंड्रॉइड डिवाइस के माध्यम से एक विशेष रूप से लिखित एप्लिकेशन के माध्यम से नियंत्रित किया जा सकता है।
अंतभाषण
यार्ड पहले से ही गहरी सर्दी है, दिन लंबे और उज्जवल हो रहे हैं। इसका मतलब यह है कि वसंत और एक अच्छा मूड बस कोने के आसपास है। मुझे खुशी होगी अगर मेरा पहला और उम्मीद है कि अंतिम प्रकाशन किसी के लिए दिलचस्प या उपयोगी नहीं था। लेख का विषय केवल निर्माण प्रक्रिया के विवरण पर केंद्रित था, इसलिए सॉफ़्टवेयर भरने और बाकी सब कुछ पर्दे के पीछे रहा। यदि रुचि है, तो आप इस विषय पर निम्नलिखित लेख समर्पित कर सकते हैं। सभी सवालों के जवाब देने के लिए तैयार।
आपका ध्यान के लिए धन्यवाद!
डाउनलोड के लिए 3 डी मॉडल