Kami mendaratkan kapal Rusia yang menjanjikan di Mars
Pada bulan Maret tahun ini, dalam kerangka minggu teknologi tinggi, ekspedisi virtual "Landing on Mars" berlangsung di RUDN. Bahkan, itu lebih seperti olimpiade - tim anak sekolah dalam program khusus menetapkan parameter awal untuk perangkat, yang seharusnya melakukan pendaratan lembut di Mars:Ketika saya mendengar berita ini, saya ingin tahu program apa yang digunakan - Saya telah berbicara lama tentang Orbiter simulator luar biasa, yang dengannya Anda dapat mempelajari astronomi dan astronotika dengan cara yang menyenangkan, dan saya juga tertarik pada program serupa yang menggabungkan pelatihan dengan permainan / kompetisi . Tidak terlalu berharap bahwa saya akan melihat program secara langsung, saya langsung berpikir tentang bagaimana mensimulasikan situasi serupa di Orbiter yang dapat diunduh secara gratis dan tersedia secara gratis. Tugasnya tidak terlihat mudah - Anda perlu memilih peralatan yang dapat ditanam di Planet Merah, membentuk parameter orbital yang diperlukan dari pergerakannya dan menentukan parameter mana yang akan kami kontrol.Perumusan masalah
Informasi tentang cara kerja program dapat diperoleh dari sumber terbuka. Dalam program TV Roscosmos, interface-nya cukup jelas terlihat: Dan di situs sekolah No. 2123 di Moskow ada laporan tentang peristiwa semacam itu dengan foto pernyataan masalah . Foto itu tidak terlalu di sana, tetapi untungnya, teks dapat dibaca:
Dan di situs sekolah No. 2123 di Moskow ada laporan tentang peristiwa semacam itu dengan foto pernyataan masalah . Foto itu tidak terlalu di sana, tetapi untungnya, teks dapat dibaca:- Pesawat ruang angkasa memasuki atmosfer Mars dengan kecepatan awal 6 km / s. Batas kondisional atmosfer adalah 100 km.
- Dua parameter tersedia untuk kontrol - kualitas aerodinamis dan sudut jalur masuk ke atmosfer.
- Tugas: untuk mengerem perangkat di atmosfer sehingga saat membuka parasut pada tahap pendaratan terakhir, kecepatannya minimal.
Program pendidikan pendahuluan kecil
Sudut lintasan adalah sudut antara vektor kecepatan pesawat ruang angkasa dan horizon lokal planet. Semakin kecil sudut lintasan, semakin berongga peralatan akan memasuki atmosfer. Pada sudut lintasan 0 °, perangkat berada dalam orbit melingkar, dan pada 90 ° jatuh secara vertikal di planet ini.Kualitas aerodinamis adalah perbandingan gaya angkat dengan gaya hambat aerodinamik pada pesawat terbang. Dengan kata sederhana, jika pesawat dengan mesin dimatikan terbang 10 km, sementara menurun 5, maka kualitas aerodinamisnya akan sama dengan dua. Pada burung, biasanya di wilayah 10, paraglider, tergantung pada kelasnya, dapat memiliki kualitas aerodinamis 7-10, gantung glider - 17-20, dan glider terbaik di udara yang tenang dapat terbang lebih dari 50 km untuk setiap kilometer dari ketinggian yang hilang.Kualitas aerodinamis adalah parameter yang agak rumit, misalnya, itu tergantung pada sudut serangan perangkat: Sudut serangan : sudut antara arah gerakan perangkat dan sumbu yang dipilih secara khusus. Jika kita berbicara tentang sudut serang sayap, maka sumbu ini akan menjadi akornya , dan untuk kasus pesawat ruang angkasa kita akan menjadi poros konstruksinya.
Sudut serangan : sudut antara arah gerakan perangkat dan sumbu yang dipilih secara khusus. Jika kita berbicara tentang sudut serang sayap, maka sumbu ini akan menjadi akornya , dan untuk kasus pesawat ruang angkasa kita akan menjadi poros konstruksinya.Pemilihan perangkat
Yang paling sulit adalah pilihan peralatan untuk pendaratan. Penggemar membuat sejumlah besar pengaya untuk Orbiter, tetapi mereka biasanya memiliki aerodinamika tetap, dan mereka harus menyesuaikan kualitas aerodinamika dengan mengubah parameter perangkat dalam file konfigurasi. Mereka biasanya disimpan dalam bentuk terbuka, tetapi mengeditnya secara manual tidak nyaman, dan menulis publikasi sains populer dengan proposal untuk terus-menerus mengedit file konfigurasi, bahkan untuk Geeks, adalah berlebihan. Yang dibutuhkan adalah beberapa cara untuk mengubah kualitas aerodinamis perangkat dengan cepat. Untungnya, metode seperti itu ditemukan. Orbiter memiliki pemangkas lift yang berfungsi mirip dengan pemangkas yang umum dalam penerbangan, memaksa perangkat untuk menaikkan atau menurunkan hidungnya sendiri. Untuk mengontrol trimmer, Anda tidak perlu masuk ke file konfigurasi, dan dengan memuat skrip yang sama, Anda bisa mendapatkan perangkat dengan kualitas aerodinamis yang diinginkan.Persyaratan jelas berikutnya adalah kemungkinan pendaratan lembut pesawat ruang angkasa. Mencoba untuk memperlambat fakta bahwa di final akan tetap menabrak permukaan tidak menarik.Setelah banyak percobaan, saya berhasil menemukan alat yang memiliki pemangkas yang dapat disesuaikan dan sistem pendaratan lunak. Tiba-tiba, kapal Rusia itu ternyata menjadi PTK NP yang menjanjikan. Di satu sisi, ini tidak realistis - kapal ini tidak pernah dirancang untuk mendarat di Mars, tetapi, selain cocok untuk dua parameter kritis, memiliki keunggulan yang aneh. Peluncuran parasut secara manual memungkinkan kontrol yang kurang lebih fleksibel, dan mesin sistem pendaratan lunak dapat digunakan untuk mengerem pada meter terakhir penerbangan dan melakukan pendaratan yang realistis, meskipun kelemahan parasut yang dirancang untuk atmosfer bumi.Pembentukan orbit yang diinginkan
Orbiter memiliki editor skrip bawaan, yang disebut dengan menekan Ctrl-F4 : Ada beberapa cara untuk mendapatkan perangkat di orbit Mars. Anda dapat membuka skrip dengan perangkat apa pun di orbit Mars, jika ada. Anda dapat membuat perangkat baru atau memindahkan yang sudah ada ke orbit Mars. Saya sudah memiliki skrip, cara termudah:
beberapa cara untuk mendapatkan perangkat di orbit Mars. Anda dapat membuka skrip dengan perangkat apa pun di orbit Mars, jika ada. Anda dapat membuat perangkat baru atau memindahkan yang sudah ada ke orbit Mars. Saya sudah memiliki skrip, cara termudah: Editor skrip memungkinkan Anda untuk menyesuaikan semua elemen orbit, tetapi mendapatkan orbit yang tepat dengan mengeditnya hanya secara manual sangat sulit. Kami akan pergi dengan cara yang lebih sederhana. Untuk memulainya, kami akan mentransfer perangkat ke orbit melingkar di atas garis khatulistiwa Mars. Fakta bahwa orbitnya melingkar berarti bahwa eksentrisitasnya akan menjadi nol, dan agar ia dapat melewati ekuator, kecenderungan orbitnya haruslah nol. Kami akan menetapkan ketinggian orbit di wilayah 150 km, menyesuaikan parameter sumbu semi-utama:
Editor skrip memungkinkan Anda untuk menyesuaikan semua elemen orbit, tetapi mendapatkan orbit yang tepat dengan mengeditnya hanya secara manual sangat sulit. Kami akan pergi dengan cara yang lebih sederhana. Untuk memulainya, kami akan mentransfer perangkat ke orbit melingkar di atas garis khatulistiwa Mars. Fakta bahwa orbitnya melingkar berarti bahwa eksentrisitasnya akan menjadi nol, dan agar ia dapat melewati ekuator, kecenderungan orbitnya haruslah nol. Kami akan menetapkan ketinggian orbit di wilayah 150 km, menyesuaikan parameter sumbu semi-utama: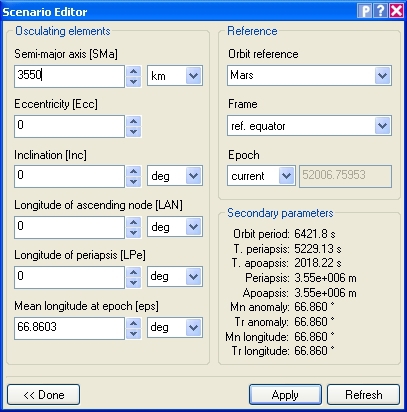 Ternyata:
Ternyata: Kami berada di tempat yang sangat baik di orbit - kami baru-baru ini melewati garis terminator. Jika kita memasuki atmosfir di sekitar titik ini, kita akan memiliki seluruh belahan yang diterangi untuk memperlambat di siang hari.Tugas selanjutnya adalah mendapatkan kecepatan di wilayah 6 km / s. Untuk melakukan ini, kami mulai mempercepat:
Kami berada di tempat yang sangat baik di orbit - kami baru-baru ini melewati garis terminator. Jika kita memasuki atmosfir di sekitar titik ini, kita akan memiliki seluruh belahan yang diterangi untuk memperlambat di siang hari.Tugas selanjutnya adalah mendapatkan kecepatan di wilayah 6 km / s. Untuk melakukan ini, kami mulai mempercepat: Akselerasi butuh waktu, kita tinggalkan di sekitar pericenter. Oleh karena itu, dalam editor kami memundurkan waktu kembali ke titik di mana sekitar satu menit tersisa untuk pericenter, dan ulangi akselerasi. Kami memeriksa kecepatan dengan memindahkan editor ke area pericenter - 6 km / s, seperti yang kami inginkan:
Akselerasi butuh waktu, kita tinggalkan di sekitar pericenter. Oleh karena itu, dalam editor kami memundurkan waktu kembali ke titik di mana sekitar satu menit tersisa untuk pericenter, dan ulangi akselerasi. Kami memeriksa kecepatan dengan memindahkan editor ke area pericenter - 6 km / s, seperti yang kami inginkan: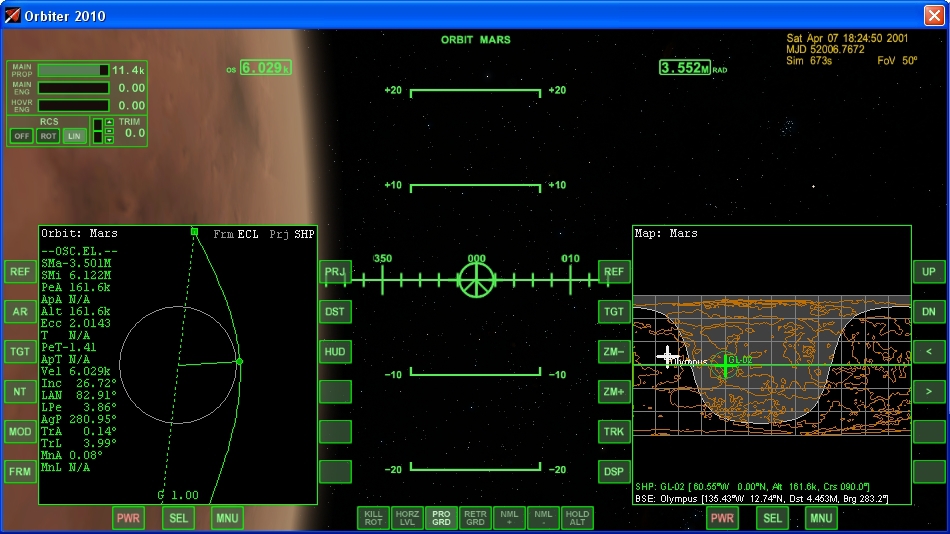 Dan sekarang kami bergerak dalam waktu dua jam yang lalu sehingga kami dapat mengubah parameter orbit lebih efisien:
Dan sekarang kami bergerak dalam waktu dua jam yang lalu sehingga kami dapat mengubah parameter orbit lebih efisien: Hanya itu, masalahnya telah diselesaikan. Simpan skripnya.
Hanya itu, masalahnya telah diselesaikan. Simpan skripnya.Pembentukan sifat aerodinamis yang diperlukan dari peralatan
Tugas kita selanjutnya adalah mengubah parameter NP PTK sehingga kualitas aerodinamisnya diatur dalam kisaran (0-1.2) yang sebanding dengan program aslinya. Untuk melakukan ini, Anda harus naik ke file konfigurasi addon. Addon PTK NP memerlukan addon lain - spacecraft3.dll. Ini adalah notasi yang cukup canggih untuk pembuatan perangkat kompleks yang relatif sederhana dengan aerodinamika dan fitur lainnya. Untungnya, ada tutorial di komunitas.. Kami membacanya dan memahami bahwa kami memerlukan cara sederhana untuk mengubah kualitas aerodinamis. Salah satu opsi adalah mencoba mengubah bobot perangkat. Secara teori, perubahan massa harus mengubah gaya yang bekerja pada tubuh, dan, misalnya, jika kita membuat kapal kita lebih mudah, sayap kecil yang dipasang di file konfigurasi akan membuatnya lebih mudah untuk mengangkatnya. Kami mengubah massa, kami memeriksa - itu tidak bekerja.Gagasan kedua adalah meningkatkan efek kontrol pemangkas. Faktanya adalah bahwa dalam model kapal ada pemangkas kecil yang tak terlihat. Suasana di sekitar mereka menciptakan kekuatan yang membelokkan kapal, membawanya ke sudut serangan non-nol. Jika kita menambah luasnya, maka gaya yang membelokkan kapal akan meningkat. Kami memeriksa: Bagaimana kita mengukur daya angkat? Ada add-on MFD Aerobrake yang bagus, yang dengan cepat mempertimbangkan kualitas aerodinamis, tetapi masalahnya adalah tidak berfungsi dengan perangkat yang dibuat menggunakan spacecraft3.dll. Harus mengukurnya dengan cara lain. Untuk melakukan ini, kita akan menggunakan skenario "Landing" siap pakai dari addon PTK NP dan melihat kekuatan yang bekerja pada perangkat menggunakan Ctrl-F9 :
Bagaimana kita mengukur daya angkat? Ada add-on MFD Aerobrake yang bagus, yang dengan cepat mempertimbangkan kualitas aerodinamis, tetapi masalahnya adalah tidak berfungsi dengan perangkat yang dibuat menggunakan spacecraft3.dll. Harus mengukurnya dengan cara lain. Untuk melakukan ini, kita akan menggunakan skenario "Landing" siap pakai dari addon PTK NP dan melihat kekuatan yang bekerja pada perangkat menggunakan Ctrl-F9 : D (Drag) - drag aerodinamik.G (Gravity) - gravitasi.F (Force) - resultan.Sekali lagi, tidak berhasil - kekuatan pengangkat tidak langsung ditampilkan. Tetapi kita dapat menentukannya secara tidak langsung, karena hasilnya adalah jumlah dari semua gaya yang bekerja pada tubuh. Untuk menyederhanakan masalah, kami mengukur gaya angkat ketika vektor dari resultan dan hambatan aerodinamis bertepatan:
D (Drag) - drag aerodinamik.G (Gravity) - gravitasi.F (Force) - resultan.Sekali lagi, tidak berhasil - kekuatan pengangkat tidak langsung ditampilkan. Tetapi kita dapat menentukannya secara tidak langsung, karena hasilnya adalah jumlah dari semua gaya yang bekerja pada tubuh. Untuk menyederhanakan masalah, kami mengukur gaya angkat ketika vektor dari resultan dan hambatan aerodinamis bertepatan: Ternyata masalah geometris sederhana: Gaya
Ternyata masalah geometris sederhana: Gaya angkat sesuai dengan rumus Pythagoras akan sama dengan sqr (40 * 40 + 83 * 83) = 95. 95/73 = 1.3 berarti bahwa kami telah memilih area pemangkas yang sesuai.
angkat sesuai dengan rumus Pythagoras akan sama dengan sqr (40 * 40 + 83 * 83) = 95. 95/73 = 1.3 berarti bahwa kami telah memilih area pemangkas yang sesuai.Mengubah perangkat dalam skrip
Nah, ini dia mudah. Dengan analogi dengan skenario di mana ada NP PTK, kami membuka skrip yang kami simpan dengan orbit yang benar dan mengubah Delta-glider ke PTK NP, pada saat yang sama kami akan mengisi bahan bakar ke tangki penuh: Semuanya, kami siap untuk berlatih.
Semuanya, kami siap untuk berlatih.Bermain
Untuk permainan kita membutuhkan:Dalam skenario, kami mengontrol sudut lintasan dengan mengubah ketinggian pericenter. Cara termudah untuk melakukan ini adalah dengan memutar kapal "ke kiri" relatif ke vektor kecepatan orbital dan memberikan dorongan dengan mesin jelajah: Sayangnya, Orbiter tidak memiliki alat untuk secara langsung mengukur sudut lintasan. Sebagai gantinya, saya mengusulkan untuk fokus pada parameter tinggi pericenter. Semakin kecil, semakin curam entri atmosfer akan menjadi:
Sayangnya, Orbiter tidak memiliki alat untuk secara langsung mengukur sudut lintasan. Sebagai gantinya, saya mengusulkan untuk fokus pada parameter tinggi pericenter. Semakin kecil, semakin curam entri atmosfer akan menjadi: Sebelum memasuki atmosfer, Anda harus menembak tiang kabel dengan tombol K dan mengatur ulang kompartemen agregat dengan tombol J :
Sebelum memasuki atmosfer, Anda harus menembak tiang kabel dengan tombol K dan mengatur ulang kompartemen agregat dengan tombol J : Pengereman dalam lapisan atmosfer yang padat dalam case paling sederhana dilakukan dengan mengatur pemangkas ke sudut yang diinginkan dan pengamatan pasif. Tetapi jika Anda mau, Anda dapat melakukan manuver gulungan dengan menggerakkan ular, dan dengan demikian mengontrol kecepatan vertikal. Dan Anda dapat mengubah kualitas aerodinamis selama pengereman, mengubah pengaturan pemangkas.
Pengereman dalam lapisan atmosfer yang padat dalam case paling sederhana dilakukan dengan mengatur pemangkas ke sudut yang diinginkan dan pengamatan pasif. Tetapi jika Anda mau, Anda dapat melakukan manuver gulungan dengan menggerakkan ular, dan dengan demikian mengontrol kecepatan vertikal. Dan Anda dapat mengubah kualitas aerodinamis selama pengereman, mengubah pengaturan pemangkas. Pada ketinggian ~ 5 km kita ulang menetas dari kompartemen parasut dengan J tombol dan membuka parasut rem dengan K tombol . Kemudian kita ulang perisai panas dengan J tombol dan melepaskan sasis dengan G tombol . Tiga kubah parasut utama akan terbuka secara independen ketika kecepatannya dapat diterima. Pada ketinggian 100-300 m, nyalakan mesin pendaratan dengan tombol Num +dan memadamkan kecepatan sebelum mendarat.
Pada ketinggian ~ 5 km kita ulang menetas dari kompartemen parasut dengan J tombol dan membuka parasut rem dengan K tombol . Kemudian kita ulang perisai panas dengan J tombol dan melepaskan sasis dengan G tombol . Tiga kubah parasut utama akan terbuka secara independen ketika kecepatannya dapat diterima. Pada ketinggian 100-300 m, nyalakan mesin pendaratan dengan tombol Num +dan memadamkan kecepatan sebelum mendarat. Simulator yang dihasilkan mengemulasi semua kesalahan yang mungkin terjadi - Anda dapat menabrak sebuah kapal ke Mars dengan kecepatan vertikal tinggi, terbang kembali ke ruang angkasa tanpa kesempatan untuk kembali, atau mendekati permukaan dengan kecepatan horizontal tinggi dan menabrak kapal meskipun mendekati kecepatan vertikal hampir nol. Tetapi dengan latihan, Anda pasti akan menemukan solusi yang baik. Selamat mendarat!
Simulator yang dihasilkan mengemulasi semua kesalahan yang mungkin terjadi - Anda dapat menabrak sebuah kapal ke Mars dengan kecepatan vertikal tinggi, terbang kembali ke ruang angkasa tanpa kesempatan untuk kembali, atau mendekati permukaan dengan kecepatan horizontal tinggi dan menabrak kapal meskipun mendekati kecepatan vertikal hampir nol. Tetapi dengan latihan, Anda pasti akan menemukan solusi yang baik. Selamat mendarat!
Epilog
Ini lucu, tetapi program sumbernya, yang bertentangan dengan harapan, membuat saya bingung. Kosmonot Sergei Revin datang ke Ufa ke teleconference anak - anak sekolah dari ISS dan meninggalkan program sekolah luar angkasa Ufa , dan dari sana sudah datang kepadaku. Parameter di sana agak berlawanan dengan intuisi, dan sudut lintasannya terasa lebih besar daripada perangkat historis, tetapi ini aneh. Saya tidak bisa memberikan tautan ke program, saya tidak punya hak untuk menerbitkan.Ada publikasi lain dari seri dengan tag Orbiter , dari skenario di mana Anda hanya dapat menonton tanpa menyentuh kontrol, hingga penerbangan yang kompleks. Source: https://habr.com/ru/post/id380361/
All Articles