Bagaimana DRC-HUBO dari Korea Selatan Memenangkan Tantangan Robotika DARPA
 Pada hari Sabtu, tim Institut Ilmu Pengetahuan dan Teknologi Korea (KAIST) dari Korea Selatan memenangkan DARPA Robotics Challenge (DRC) di Pomona, California, ketika robot mereka, humanoid DRC-HUBO yang dapat beradaptasi , mengalahkan 22 robot lain dari lima negara yang berbeda dan memenangkan hadiah uang tunai utama sebesar $ 2 juta.
Pada hari Sabtu, tim Institut Ilmu Pengetahuan dan Teknologi Korea (KAIST) dari Korea Selatan memenangkan DARPA Robotics Challenge (DRC) di Pomona, California, ketika robot mereka, humanoid DRC-HUBO yang dapat beradaptasi , mengalahkan 22 robot lain dari lima negara yang berbeda dan memenangkan hadiah uang tunai utama sebesar $ 2 juta. Kemampuan untuk berubah dari robot berjalan dua kaki menjadi mobil beroda memainkan peran penting dalam menerima penghargaan. Banyak robot kehilangan keseimbangan dan jatuh ke tanah, membuka pintu atau bekerja dengan bor. Tapi tidak DRC-HUBO . Desain unik memungkinkan dia untuk menyelesaikan tugas lebih cepat dan, yang lebih penting, tetap di atas kakinya (dan roda).
Kemampuan untuk berubah dari robot berjalan dua kaki menjadi mobil beroda memainkan peran penting dalam menerima penghargaan. Banyak robot kehilangan keseimbangan dan jatuh ke tanah, membuka pintu atau bekerja dengan bor. Tapi tidak DRC-HUBO . Desain unik memungkinkan dia untuk menyelesaikan tugas lebih cepat dan, yang lebih penting, tetap di atas kakinya (dan roda).Gerakan dua kaki [untuk robot] belum cukup stabil, ”kata Rong Ho O, profesor teknik mesin di lembaga ilmiah dan teknis terkemuka Korea, ketua tim KAIST. - Jika salah satunya bekerja salah, hasilnya bisa menjadi bencana besar.
 Dia mengatakan bahwa robot humanoid memiliki kelebihan ketika bekerja di masyarakat orang, tetapi dia ingin mengembangkan desain yang akan meminimalkan risiko jatuh: "Saya memikirkan banyak hal, dan yang paling sederhana adalah roda di atas lutut saya."DRC-HUBO dapat mengubah postur tubuh, berdiri dengan dua kaki, berjalan, meraih benda-benda yang tinggi, dan juga bergerak dalam posisi yang lebih stabil, di atas lutut Anda.DARPA memutuskan untuk mengatur DRC setelah insiden Fukushima di Jepang, berharap untuk maju di bidang robotika. Ke kompetisi Final DRCtim yang mengembangkan robot semi-otonom diundang, dan operator manusia harus bekerja sama untuk memodelkan kondisi bencana. Robot yang dibuat oleh universitas dan perusahaan untuk kompetisi sangat berbeda dalam ukuran dan bentuk, di antaranya ada robot dengan kaki, roda, serta hibrida.
Dia mengatakan bahwa robot humanoid memiliki kelebihan ketika bekerja di masyarakat orang, tetapi dia ingin mengembangkan desain yang akan meminimalkan risiko jatuh: "Saya memikirkan banyak hal, dan yang paling sederhana adalah roda di atas lutut saya."DRC-HUBO dapat mengubah postur tubuh, berdiri dengan dua kaki, berjalan, meraih benda-benda yang tinggi, dan juga bergerak dalam posisi yang lebih stabil, di atas lutut Anda.DARPA memutuskan untuk mengatur DRC setelah insiden Fukushima di Jepang, berharap untuk maju di bidang robotika. Ke kompetisi Final DRCtim yang mengembangkan robot semi-otonom diundang, dan operator manusia harus bekerja sama untuk memodelkan kondisi bencana. Robot yang dibuat oleh universitas dan perusahaan untuk kompetisi sangat berbeda dalam ukuran dan bentuk, di antaranya ada robot dengan kaki, roda, serta hibrida.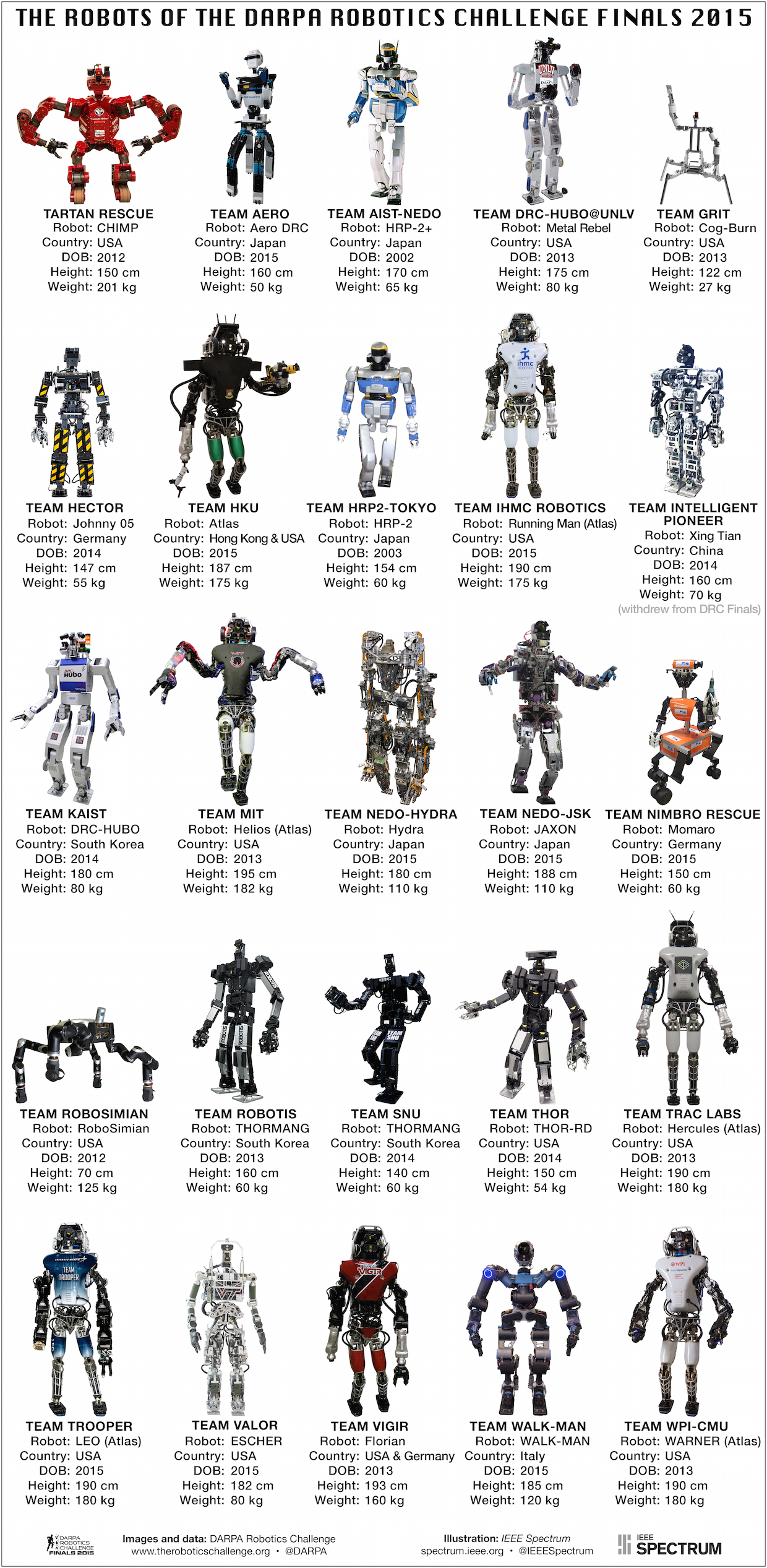 DRC-HUBO menjadi pemenang karena mampu menyelesaikan semua delapan tugas tanpa kesalahan dalam waktu singkat (44 menit 28 detik). Tim lain juga tampil baik, tetapi robot mereka kehilangan waktu karena penundaan. Di antara yang terbaik adalah tim Penyelamat Tartan , CHIMP -nya adalah robot dengan kaki dan jejak ulat, yang dapat kembali ke tugas setelah musim gugur; Momarodari tim Universitas Bonn - mobil sederhana dan elegan di atas roda, dengan kepala berputar dan dua tangan; RoboSimian dari Jet Propulsion Laboratory NASA, dengan empat kaki dan gerakan seperti yoga; ATLAS dari tim IHMC adalah robot humanoid listrik besar yang dikembangkan oleh Boston Dynamics .
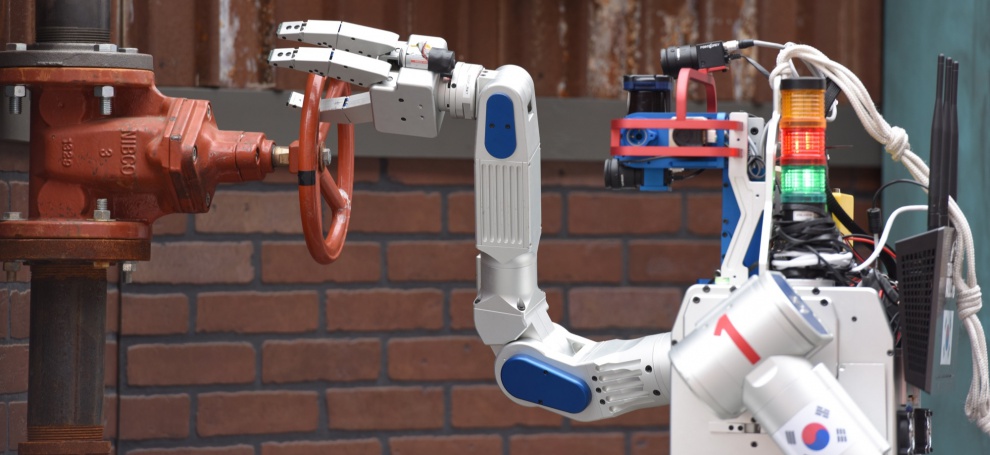
DRC-HUBO menjadi pemenang karena mampu menyelesaikan semua delapan tugas tanpa kesalahan dalam waktu singkat (44 menit 28 detik). Tim lain juga tampil baik, tetapi robot mereka kehilangan waktu karena penundaan. Di antara yang terbaik adalah tim Penyelamat Tartan , CHIMP -nya adalah robot dengan kaki dan jejak ulat, yang dapat kembali ke tugas setelah musim gugur; Momarodari tim Universitas Bonn - mobil sederhana dan elegan di atas roda, dengan kepala berputar dan dua tangan; RoboSimian dari Jet Propulsion Laboratory NASA, dengan empat kaki dan gerakan seperti yoga; ATLAS dari tim IHMC adalah robot humanoid listrik besar yang dikembangkan oleh Boston Dynamics .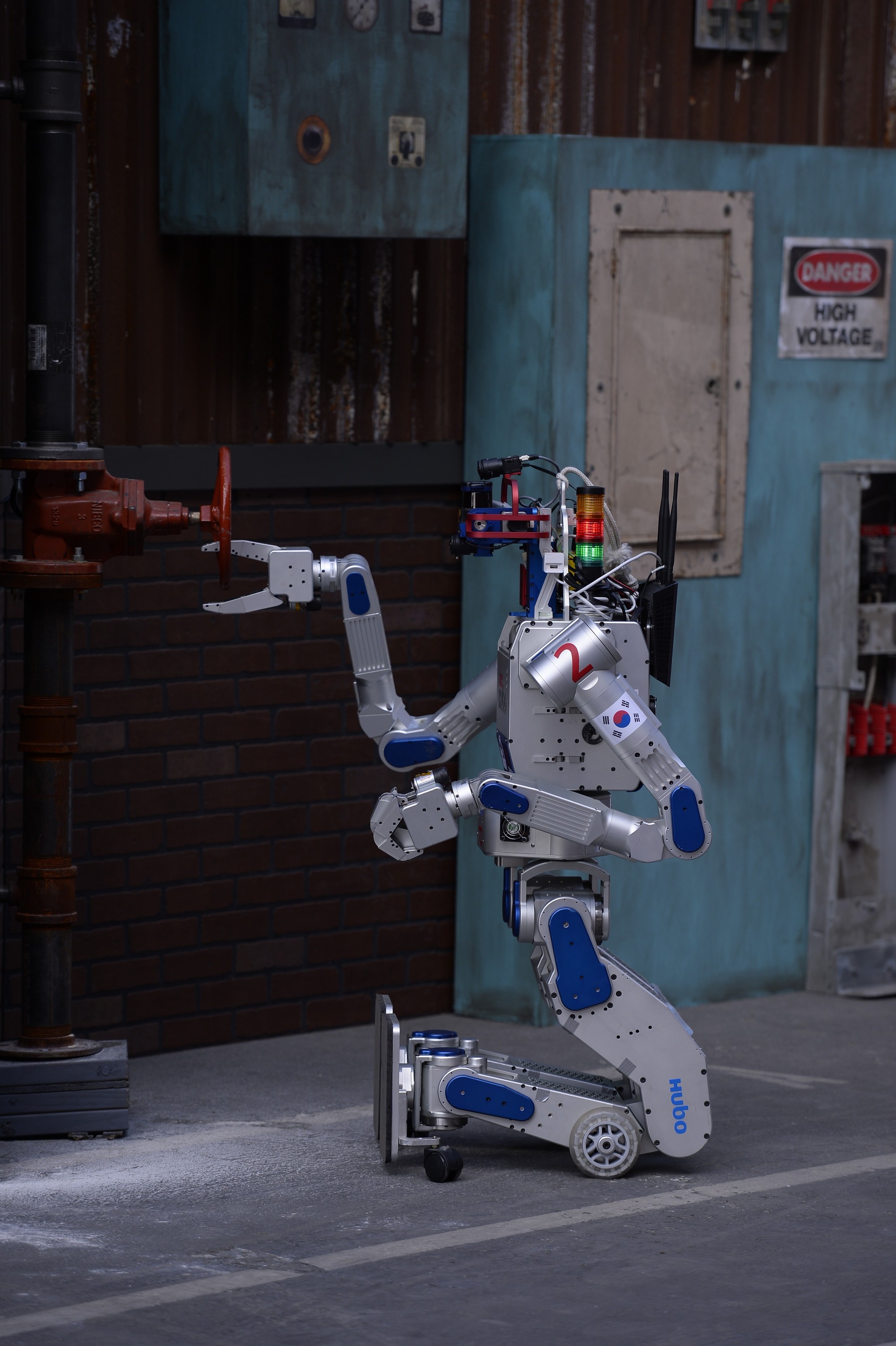 DRC-HUBO melakukan tugas untuk menutup katup. Perhatikan bahwa bagian atas tubuhnya diputar 180 derajat.
DRC-HUBO melakukan tugas untuk menutup katup. Perhatikan bahwa bagian atas tubuhnya diputar 180 derajat.Fleksibilitas adalah hal yang paling penting, kata manajer DARPA dan penyelenggara DRC Jill Pratt pada pertemuan dengan wartawan yang mengomentari desain robot. "Robot yang dapat mengubah konfigurasi dari menggunakan kaki menjadi menggunakan roda dapat memiliki struktur yang lebih kompleks dan lebih berat, tetapi itu akan memberi Anda fleksibilitas itu."
Profesor O adalah pakar robot humanoid yang diakui secara internasional. Dia dan murid-murid KAIST- nya di Daejeon, Korea Selatan, telah meningkatkan platform HUBO mereka selama beberapa generasi. Di bawah ini adalah video yang sudah berumur beberapa tahun: lalu Profesor O mendemonstrasikan HUBO 2:Untuk Final DRC, ia memutuskan untuk memodifikasi robot secara signifikan untuk mempersiapkannya menghadapi tugas yang mungkin. Di kelas master setelah kompetisi, Profesor O mengatakan bahwa DRC-HUBO "tidak berbeda, itu hanya robot humanoid." Namun faktanya, timnya dari KAIST dengan hati-hati mengerjakan setiap detail. Dia memperkirakan biaya masing-masing robot sekitar $ 500.000 dan $ 1 juta. Berikut adalah fitur utama yang membantu DRC-HUBO mengatasi tugas:1. Roda berlutut: DRC-HUBOmemiliki roda di kedua lutut dan rol di kaki. Roda memungkinkan robot untuk bergerak dengan cepat dan mantap. Bergerak di tanah, ia menggunakan sensor optik pada tulang keringnya untuk mengukur jarak menggunakan aliran optik. 2. Mesin bertenaga: sama seperti SCHAFT - robot yang memenangkan kompetisi awal DARPA dan diakuisisi oleh Google , DRC-HUBO memiliki mesin yang sangat kuat (memiliki 33 di antaranya, dengan 31 derajat gerakan bebas). Berkat mesin khusus dan sistem pendingin udara (kipas dan bilah), robot dapat menggunakan tegangan 3-4 kali lebih banyak daripada yang ditentukan dalam spesifikasi mesin, dengan nilai maksimum 30 ampere dalam beberapa kasus.3. Kompatibilitas: tim ingin membuat robot kompatibel tanpa menggunakan sensor torsi dan pengontrol otomatis yang biasa (mereka takut ini akan menyebabkan ketidakstabilan). Karena itu, menggunakan penguat khusus, masalah kompatibilitas dipindahkan ke driver mesin.
2. Mesin bertenaga: sama seperti SCHAFT - robot yang memenangkan kompetisi awal DARPA dan diakuisisi oleh Google , DRC-HUBO memiliki mesin yang sangat kuat (memiliki 33 di antaranya, dengan 31 derajat gerakan bebas). Berkat mesin khusus dan sistem pendingin udara (kipas dan bilah), robot dapat menggunakan tegangan 3-4 kali lebih banyak daripada yang ditentukan dalam spesifikasi mesin, dengan nilai maksimum 30 ampere dalam beberapa kasus.3. Kompatibilitas: tim ingin membuat robot kompatibel tanpa menggunakan sensor torsi dan pengontrol otomatis yang biasa (mereka takut ini akan menyebabkan ketidakstabilan). Karena itu, menggunakan penguat khusus, masalah kompatibilitas dipindahkan ke driver mesin.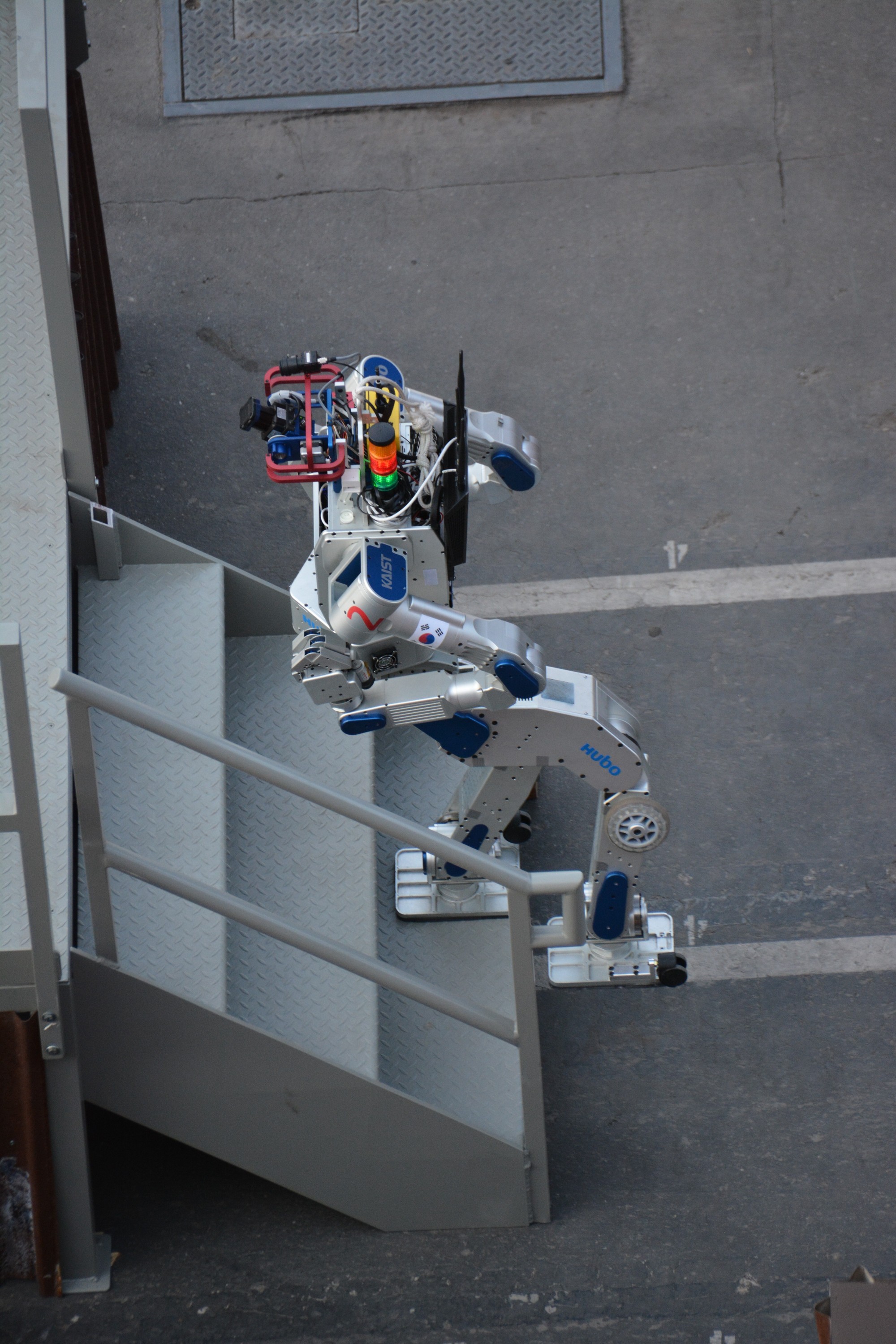 4. Memutar batang tubuh: DRC-HUBO dapat memutar badan bagian atas 180 derajat. Ini berarti bahwa lutut robot dapat diputar ke satu arah, sementara dia dapat menonton di arah yang berlawanan (coba sendiri!). Kemampuan ini tidak hanya bekerja ketika sedang berdiri, tetapi juga saat Anda berlutut. Robot memanfaatkan kesempatan ini dalam beberapa tugas ketika diperlukan untuk: mengendarai kendaraan, melubangi dinding, bergerak melalui puing-puing dan menaiki tangga.5. Lengan panjang: Anggota tim KAIST menyadari bahwa lengan HUBO 2 terlalu pendek untuk beberapa tugas, sehingga mereka membuat lengan lebih panjang, berputar 7 derajat. Mereka juga menyembunyikan semua kabel ke dalam sehingga mereka tidak menempel pada benda-benda di sekitarnya. Setiap tangan dapat menahan berat hingga 15 kg, dan juga memiliki "pegangan yang dapat disesuaikan" yang dapat mengambil benda yang keras dan lunak.
4. Memutar batang tubuh: DRC-HUBO dapat memutar badan bagian atas 180 derajat. Ini berarti bahwa lutut robot dapat diputar ke satu arah, sementara dia dapat menonton di arah yang berlawanan (coba sendiri!). Kemampuan ini tidak hanya bekerja ketika sedang berdiri, tetapi juga saat Anda berlutut. Robot memanfaatkan kesempatan ini dalam beberapa tugas ketika diperlukan untuk: mengendarai kendaraan, melubangi dinding, bergerak melalui puing-puing dan menaiki tangga.5. Lengan panjang: Anggota tim KAIST menyadari bahwa lengan HUBO 2 terlalu pendek untuk beberapa tugas, sehingga mereka membuat lengan lebih panjang, berputar 7 derajat. Mereka juga menyembunyikan semua kabel ke dalam sehingga mereka tidak menempel pada benda-benda di sekitarnya. Setiap tangan dapat menahan berat hingga 15 kg, dan juga memiliki "pegangan yang dapat disesuaikan" yang dapat mengambil benda yang keras dan lunak.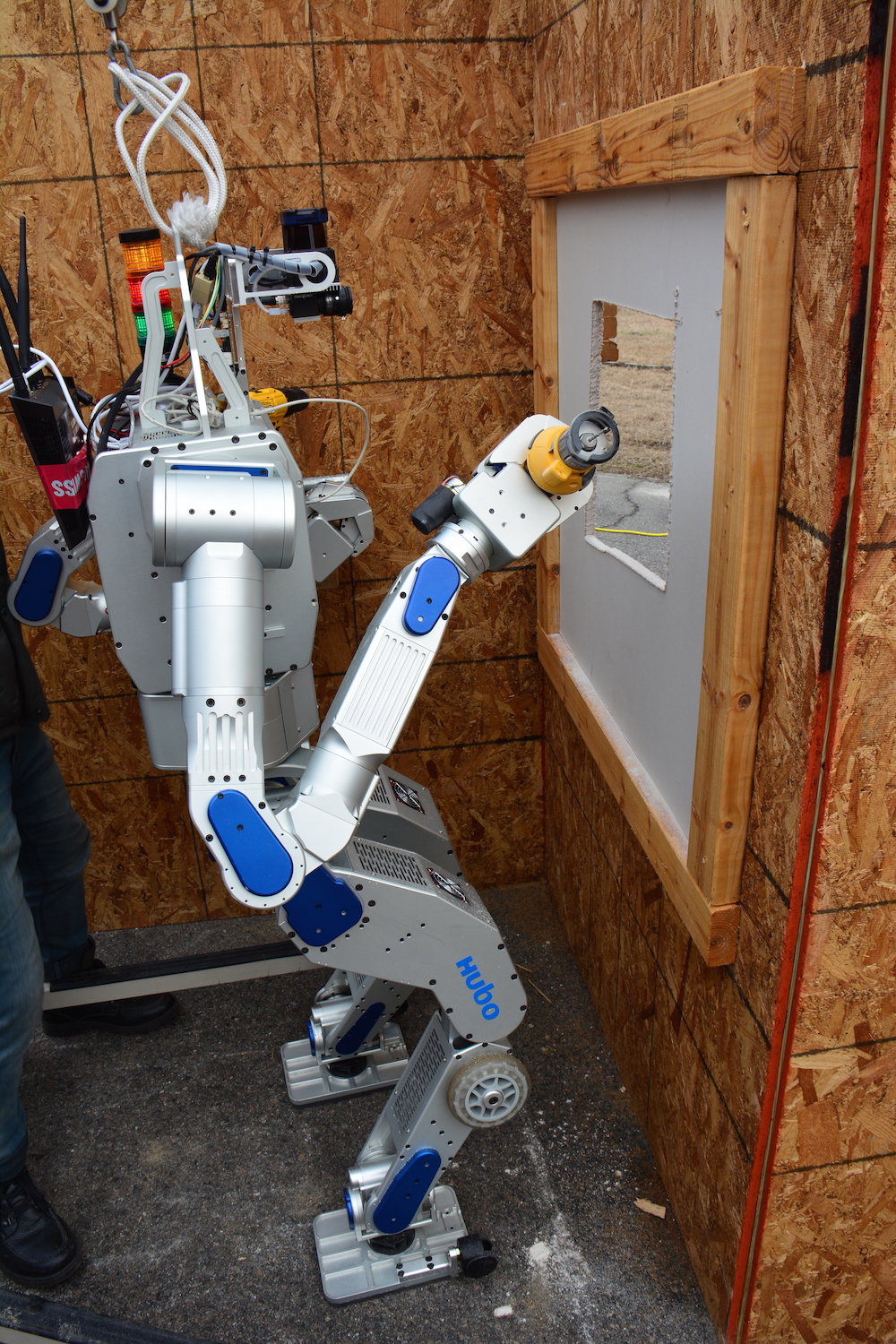 6. Penginderaan yang disederhanakan: Alih-alih mengisi kepala dengan sensor, kamera stereoskopik dan lidar yang secara konstan memindai lingkungan (misalnya teknologi ini menggunakan robot ATLAS ), DRC-HUBOmemiliki sistem visi yang disederhanakan; sebagian besar operator mengandalkan kamera konvensional, dan lidar yang terpasang pada drive servo memindai lingkungan hanya jika diperlukan. Bahkan, robot itu tidak memiliki kepala - "hanya mata", catat salah satu siswa KAIST .7. Daya: ketika mesin membutuhkan daya tinggi, sistem daya utama mungkin tidak dapat menyediakan energi yang cukup untuk komponen penting mesin. Untuk menghindari hal ini, tim menggunakan supercapacitor, yang memasok energi ke komputer, saluran transmisi dan beberapa sensor dan giroskop, bahkan jika sistem tenaga utama gagal.8. Perangkat lunak khusus: tim menggunakan Xenomai OS waktu nyata untuk Linux dan kerangka kendali gerak khusus yang disebut PODO (dikembangkan oleh KAIST ). Mereka juga memanfaatkan lingkungan simulasi Gazebo. Tim mengembangkan perangkat lunaknya dengan fokus pada bandwidth rendah dan komunikasi yang tidak stabil antara operator dan robot.
6. Penginderaan yang disederhanakan: Alih-alih mengisi kepala dengan sensor, kamera stereoskopik dan lidar yang secara konstan memindai lingkungan (misalnya teknologi ini menggunakan robot ATLAS ), DRC-HUBOmemiliki sistem visi yang disederhanakan; sebagian besar operator mengandalkan kamera konvensional, dan lidar yang terpasang pada drive servo memindai lingkungan hanya jika diperlukan. Bahkan, robot itu tidak memiliki kepala - "hanya mata", catat salah satu siswa KAIST .7. Daya: ketika mesin membutuhkan daya tinggi, sistem daya utama mungkin tidak dapat menyediakan energi yang cukup untuk komponen penting mesin. Untuk menghindari hal ini, tim menggunakan supercapacitor, yang memasok energi ke komputer, saluran transmisi dan beberapa sensor dan giroskop, bahkan jika sistem tenaga utama gagal.8. Perangkat lunak khusus: tim menggunakan Xenomai OS waktu nyata untuk Linux dan kerangka kendali gerak khusus yang disebut PODO (dikembangkan oleh KAIST ). Mereka juga memanfaatkan lingkungan simulasi Gazebo. Tim mengembangkan perangkat lunaknya dengan fokus pada bandwidth rendah dan komunikasi yang tidak stabil antara operator dan robot. Dan sekarang mari kita melihat lebih dekat pada DRC-HUBO dan bagaimana dia menjalani semua delapan tugas, yang membawa kemenangan bagi tim KAIST (jika Anda ingin melihat semuanya secara penuh, Anda dapat melakukannya dengan referensi; versi akselerasi ada di sini):
Dan sekarang mari kita melihat lebih dekat pada DRC-HUBO dan bagaimana dia menjalani semua delapan tugas, yang membawa kemenangan bagi tim KAIST (jika Anda ingin melihat semuanya secara penuh, Anda dapat melakukannya dengan referensi; versi akselerasi ada di sini):1. Tugas mengemudi.
Tim diizinkan untuk melakukan modifikasi pada kendaraan Polaris sehingga robot mereka dapat dengan mudah masuk dan keluar mobil. Tim KAIST memasang perangkat logam dengan dua tuas di bagian bawah mobil; ketika DRC-HUBO menekan salah satu tuas, sistem kabel bekerja sehingga tuas kedua menekan pedal gas. Dengan tangan kirinya, robot memegang ke mobil, dan dengan tangan kanannya ia mengendalikan kemudi. Dia menyelesaikan tugas ini dengan sangat cepat (prosesnya memakan waktu sedikit lebih dari satu menit) dan, tidak seperti tim lain, tidak berhenti melewati rintangan.2. Tugas keluar dari kendaraan.
Ini adalah salah satu tugas yang paling sulit. Mempersiapkannya, Profesor Oh, ketika dia memberi tahu kami, dia keluar dari mobil beberapa kali untuk memahami gerakan dan bagian tubuh apa yang dia gunakan untuk ini. Dia menyimpulkan bahwa "pendekatan dinamis" akan diperlukan. Timnya memprogram DRC-HUBO sehingga dia mengangkat tangannya dan memegangi rangka mesin. Robot menggunakan 100 Newton traksi untuk masing-masing tangan. Ketika lengan mengangkat tubuh robot, pada umumnya itu jatuh keluar dari mobil, meskipun gerakannya dikendalikan (berkat "pendekatan dinamis"). Perhatikan manuvernya yang luar biasa untuk keluar dari mobil sekitar jam 1:00! Profesor O melaporkan bahwa selama pengembangan gerakan ini beberapa mesin terbakar, tetapi masalahnya diselesaikan dengan menggunakan mesin yang paling kuat dan dibuat secara khusus. Saat ini, robot dapat keluar dari mobil dalam waktu kurang dari 4 menit, dan ketika sudah di tanah, ia duduk di atas lutut dan daunnya.3. Misi dengan pintu.
Tidak seperti robot lain yang harus berdiri (dan menyeimbangkan dengan dua kaki) untuk menyelesaikan tugas ini, DRC-HUBO bisa berlutut dengan memutar pegangan pintu. Dengan cekatan ia menggunakan tangannya yang lain untuk menjaga pintu tetap terbuka sementara ia memutar kenop pintu. Dalam waktu kurang dari 2 menit, ia melaju melalui pintu.4. Tugas dengan katup.
Perhatikan bahwa di awal video, Lidar bergerak naik dan turun untuk memungkinkan operator memindai medan di depan robot. Kemudian, ketika DRC-HUBO mendekati katup gerbang , ia memutar tubuh bagian atas 180 derajat. Perhatikan gerakannya pada 0:20, karena Anda mungkin tidak memperhatikan (sudut pengambilan gambar tidak menunjukkan bagian bawah tubuh robot, sayangnya). Dalam posisi ini, masih berlutut, robot dapat mengangkat tubuh sehingga lebih mudah mengontrol katup (mengapa berdiri jika tidak perlu?). Robot memindai medan menggunakan lidar, menentukan posisi dan setelah 3 menit melakukan tugas. Harap dicatat bahwa hanya diperlukan satu putaran, tetapi DRC-HUBOmembuat dua putaran penuh! Pada 2:01, Anda dapat melihat robot "mengembalikan" batang tubuh ke posisi normal.5. Tugas dengan dinding.
Ini adalah tugas yang sulit bagi sebagian besar tim, karena robot harus memegang bor dan menekan tombol on / off untuk menggunakan perangkat. DRC-HUBO menggunakan sensor gaya pada setiap lengan untuk menangkap instrumen dengan lebih baik. Anda dapat melihat bagaimana robot bergerak dengan sendirinya dan bahkan menggerakkan bor di rak (merobohkan bor lain di jalan) untuk menangkapnya dengan lebih baik. Ketika robot berhasil mengambil alat, operator menunjukkan tempat untuk perforasi, dan robot melakukan sisanya. Dia menggunakan 20 Newton traksi kekuatan, dan Anda dapat melihat bagaimana dia menggunakan tubuhnya untuk menggerakkan bor dengan sempurna dalam lingkaran. Menyelesaikan tugas membutuhkan robot 11 menit.6. Pekerjaan yang mengejutkan.
Tugasnya adalah mencabut steker dan memasukkannya ke stopkontak lain. Perhatikan bagaimana DRC-HUBO memindai lantai dan mengetahui bahwa bor yang dijatuhkannya sebelumnya ada di jalurnya. Robot berputar dan mendorong instrumen dengan lututnya. Kemudian dia mencoba untuk berbalik dan sepertinya dia menabrak tembok. Operator, jelas, perhatikan masalahnya, dia maju sedikit dan kemudian dia bisa berbalik. Pada akhirnya, robot mendekati dinding dengan soket yang dipasang lebih tinggi dari katup gerbang dan pegangan pintu. Sudah waktunya untuk bangkit, dan Anda bisa menontonnya sekitar pukul 3:05. DRC-HUBOmengambil beberapa langkah ke depan dan setelah beberapa saat mulai menyelesaikan tugas. Dia mengambil colokannya dengan kabel; kami percaya bahwa itu dimaksudkan agar operator dapat melihat steker dengan lebih baik dan lengan robot tidak mengaburkannya, yang akan membuat tugas menjadi tidak mungkin. Pada waktunya, Anda dapat melihat ini sekitar 7:47, ketika robot mencoba memasukkan steker dan melewatkan soket. Setelah beberapa gerakan korektif, tugas selesai! 13 menit dan 30 detik berlalu - lebih dari menyelesaikan semua tugas lainnya.7. Tugas bergerak melalui puing-puing.
DRC-HUBO dapat menggerakkan lututnya ke depan atau memutar badan 180 derajat dan mengayuh kakinya ke depan, bertindak seperti ember buldoser. Dan inilah yang dia lakukan untuk menyelesaikan tugas. Anda dapat melihat bagaimana dia memutar tubuhnya pada 0:28. Itu terlihat keren. Robot mengangkat tangan - mungkin agar mereka tidak terjerat dalam sampah. Kemudian mulai bergerak melalui puing-puing. Dia berhenti hanya sesaat, ketika sepertinya sepotong kayu tersangkut di balok kayu, jadi dia berputar sedikit ke kiri untuk mengeluarkannya dari jalan setapak. Pindahkan pipa plastik ke kanan. Pada 4:14, dia memutar tubuhnya lagi dan berdiri di depan tangga. Tugas ini memakan waktu kurang dari 5 menit.8. Tugas dengan langkah-langkahnya.
Profesor O mengatakan bahwa untuk banyak tugas, terutama untuk menaiki tangga, penting bahwa robot dapat melihat kakinya. Robot besar seperti ATLAS tidak bisa melakukan ini, mereka perlu membengkokkan tubuh, yang membuat menyeimbangkan lebih sulit. DRC-HUBOMemecahkan masalah ini dengan cara yang sangat cerdas. Dia menaiki tangga ke belakang! Dengan demikian, lututnya tidak menghalangi kamera dan Anda bisa melihat kaki dan tanah. Tapi bagaimana dia bisa melihat kaki jika dia bangkit ke belakang? Memutar badan, tentu saja! Anda dapat melihat seluruh proses, mulai dari 0:26. Robot berlutut di depan tangga, dan kemudian tiba-tiba membelakanginya. Kemudian dia bangun, dan pada 0:55 Anda akan melihat bagaimana dia memutar badan 180 derajat. Sekarang dia dapat memindai langkah-langkah dan mulai memanjat. Tetapi perhatikan bahwa sebelum itu ia mengambil dua langkah ke samping, ke kiri (1:45)! Setelah beberapa menit - yang tampak seperti keabadian bagi penonton - robot akhirnya mulai naik, melanggar tiga langkah terakhir satu demi satu. Jelas! Dalam waktu kurang dari 7 menit, DRC-HUBOberdiri di atas platform. Tidak ada suara di video, tetapi pada saat itu tim dan penonton meledak dengan tepuk tangan.KAIST membuat empat salinan DRC-HUBO dan berlatih tanpa kabel pengaman selama lebih dari sebulan sebelum kompetisi. Mereka berlatih di jalan, di tempat parkir dengan permukaan yang tidak rata dan dalam kondisi cuaca yang berbeda, termasuk sinar matahari yang kuat dan angin. "Jika kita tidak melepas kabel pengaman, operator akan takut," kata Profesor O di bengkel setelah kompetisi.Dia menambahkan bahwa selama pelatihan, mereka melakukan semua tugas dalam kedua mode - berdiri dan berlutut (waktu rata-rata adalah 30 menit). Tim itu pandai membersihkan puing-puing dengan tangan DRC-HUBO , yang tidak dapat mereka peragakan di Final DRC , dan mereka juga bisa melakukan tugas di permukaan yang lebih sulit daripada apa yang ada di kompetisi., … ! - , .
Source: https://habr.com/ru/post/id380589/
All Articles