Robot dapat menyentuh benda halus dengan lembut.
 Manipulator meraihInsinyur semut dari Universitas Sains dan Teknologi Iowa telah menciptakan jenis manipulator baru untuk robot yang akan memungkinkan mereka untuk secara akurat menangani benda rapuh dan kecil. Tabung kecil menyerupai tentakel membungkus diri di sekitar objek yang diinginkan dan menahannya tanpa meremas.Manipulator klasik menyerupai penjepit, atau dua jari, yang dengannya seseorang mengambil benda. Untuk memegang item di jari-jari Anda, Anda harus menekannya. Untuk menghindari benturan rapuh dan kasing, insinyur menciptakan berbagai cangkir hisap, meniru cakar tokek dan menerapkan inovasi lainnya . Tetapi para insinyur Amerika memutuskan untuk mengambil alih tangkapan dari gurita dan sejenisnya.Panjang mikrotubulus hanya 8 milimeter dan berdiameter sekitar 0,2 milimeter. Bahan tabung adalah polydimethylsiloxane , polimer transparan.Prinsip operasi tabung sederhana. Mereka tertutup rapat di satu sisi, dan ketika peralatan memompa udara ke mereka, mereka meluruskan, dan ketika dipompa keluar, mereka dilipat menjadi beberapa cincin.Bentuk khusus ujung tabung dan ketebalan dinding yang bervariasi memungkinkannya untuk melengkung menjadi spiral secara terkendali. Bentuk rumit dari tabung diciptakan berkat pemodelan komputer pendahuluan. Ini adalah manipulator berbentuk tentakel pertama yang dapat dilipat sedemikian rupa sehingga mereka berhasil dibuat sedemikian kecil. Detailnya dapat ditemukan di jurnal ilmiah Nature .Manipulator semacam itu akan menemukan aplikasi di bidang robot medis. Genggaman lembut dapat digunakan selama operasi untuk memperbaiki dan memindahkan struktur seperti pembuluh darah atau jaringan lunak.Kaki laba-laba biasa bekerja dengan prinsip yang sama. Kaki laba-laba membungkuk, seperti biasa, dengan otot, dan hemolimf, cairan khusus yang bersirkulasi di seluruh rongga tubuh arthropoda, tidak tertekuk oleh tekanan hidrostatik.Tentakel telah lama menarik perhatian para insinyur. Solusi serupa dengan tabung pneumatik fleksibel telah dibuktikan oleh para ilmuwan dari Harvard School of Engineering and Applied Sciences (USA).
Manipulator meraihInsinyur semut dari Universitas Sains dan Teknologi Iowa telah menciptakan jenis manipulator baru untuk robot yang akan memungkinkan mereka untuk secara akurat menangani benda rapuh dan kecil. Tabung kecil menyerupai tentakel membungkus diri di sekitar objek yang diinginkan dan menahannya tanpa meremas.Manipulator klasik menyerupai penjepit, atau dua jari, yang dengannya seseorang mengambil benda. Untuk memegang item di jari-jari Anda, Anda harus menekannya. Untuk menghindari benturan rapuh dan kasing, insinyur menciptakan berbagai cangkir hisap, meniru cakar tokek dan menerapkan inovasi lainnya . Tetapi para insinyur Amerika memutuskan untuk mengambil alih tangkapan dari gurita dan sejenisnya.Panjang mikrotubulus hanya 8 milimeter dan berdiameter sekitar 0,2 milimeter. Bahan tabung adalah polydimethylsiloxane , polimer transparan.Prinsip operasi tabung sederhana. Mereka tertutup rapat di satu sisi, dan ketika peralatan memompa udara ke mereka, mereka meluruskan, dan ketika dipompa keluar, mereka dilipat menjadi beberapa cincin.Bentuk khusus ujung tabung dan ketebalan dinding yang bervariasi memungkinkannya untuk melengkung menjadi spiral secara terkendali. Bentuk rumit dari tabung diciptakan berkat pemodelan komputer pendahuluan. Ini adalah manipulator berbentuk tentakel pertama yang dapat dilipat sedemikian rupa sehingga mereka berhasil dibuat sedemikian kecil. Detailnya dapat ditemukan di jurnal ilmiah Nature .Manipulator semacam itu akan menemukan aplikasi di bidang robot medis. Genggaman lembut dapat digunakan selama operasi untuk memperbaiki dan memindahkan struktur seperti pembuluh darah atau jaringan lunak.Kaki laba-laba biasa bekerja dengan prinsip yang sama. Kaki laba-laba membungkuk, seperti biasa, dengan otot, dan hemolimf, cairan khusus yang bersirkulasi di seluruh rongga tubuh arthropoda, tidak tertekuk oleh tekanan hidrostatik.Tentakel telah lama menarik perhatian para insinyur. Solusi serupa dengan tabung pneumatik fleksibel telah dibuktikan oleh para ilmuwan dari Harvard School of Engineering and Applied Sciences (USA).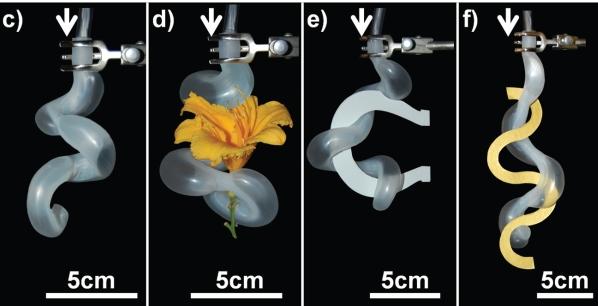 Penciptaan insinyur dari HarvardDari solusi yang tidak biasa, kita dapat mengingat konsep prostesis , di mana motor menarik dan melonggarkan kabel yang melewati tentakel. Mereka memungkinkan prostesis melengkung secara bertahap, menangkap objek dari kecil hingga cukup besar. Prostesis diluruskan karena elastisitas internal.
Penciptaan insinyur dari HarvardDari solusi yang tidak biasa, kita dapat mengingat konsep prostesis , di mana motor menarik dan melonggarkan kabel yang melewati tentakel. Mereka memungkinkan prostesis melengkung secara bertahap, menangkap objek dari kecil hingga cukup besar. Prostesis diluruskan karena elastisitas internal. Prostesis tentakel
Prostesis tentakelSource: https://habr.com/ru/post/id380865/
All Articles