Aplikasi lain dari mesin CNC
Mesin CNC adalah mesin yang dikontrol secara numerik. Memungkinkan Anda menghasilkan komponen sesuai dengan program yang disiapkan sebelumnya dengan akurasi, pengulangan, dan kecepatan tinggi. Artikel ini akan membahas mesin berliku yang saya buat, yang saya beri nama Orbiter.Bola CNC berpotongan erat dengan bola pencetakan 3D. Mesin saya memiliki desain yang agak tidak biasa untuk mesin CNC, karena semua orang terbiasa melihat mesin penggilingan CNC, pembakar CNC, printer 3D , dan mesin yang dijelaskan dalam artikel ini adalah mesin penggulungan, atau lebih tepatnya mesin penggulung penutup lampu yang terbuat dari benang dan lem. Prinsip operasi adalah berliku pada bola berputar yang meningkat, yang, setelah lem mengering, turun dan dikeluarkan.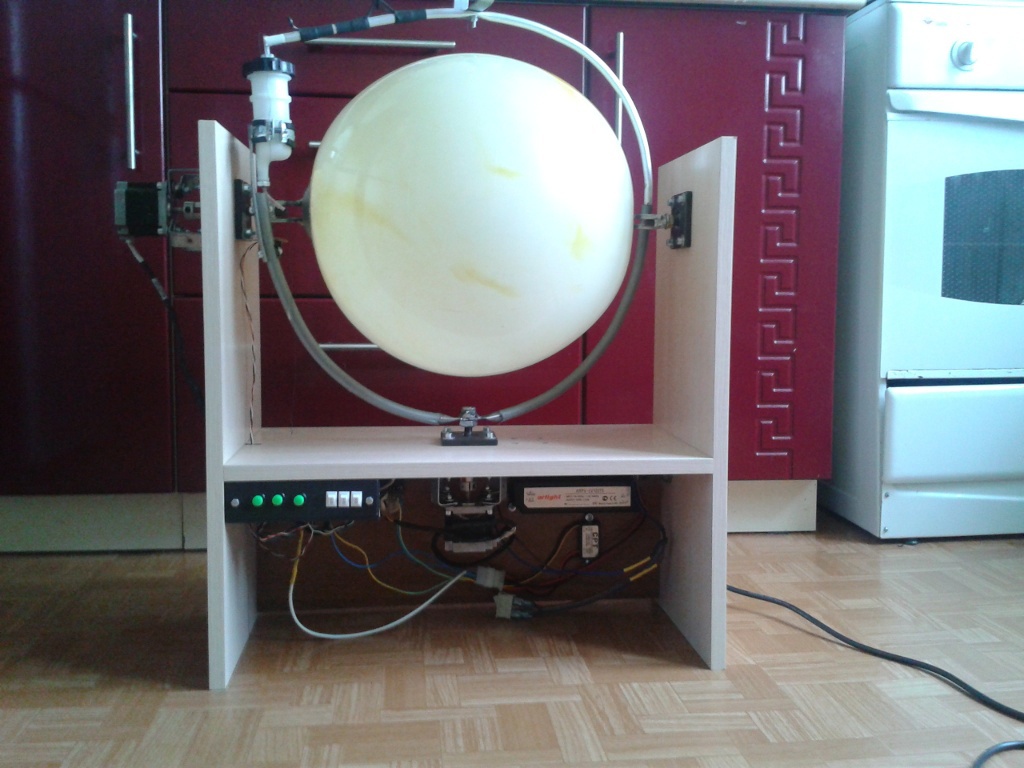 Selama sepuluh tahun terakhir, harga komponen dan elektronik CNC telah turun secara signifikan, sehingga hampir semua orang mampu merakit mesin CNC. Saat merakit mesin, saya dipandu oleh pendidikan teknik, anggaran, dan akal sehat. Untuk alasan ini, saya mencoba mencari suku cadang untuk mesin dalam penjualan gratis dengan minimum logam, ada yang dipesan di Cina, ada yang dibeli di toko mobil dan konstruksi, ada yang selesai di garasi teman. Beberapa detail masih harus dipesan oleh turner.
Selama sepuluh tahun terakhir, harga komponen dan elektronik CNC telah turun secara signifikan, sehingga hampir semua orang mampu merakit mesin CNC. Saat merakit mesin, saya dipandu oleh pendidikan teknik, anggaran, dan akal sehat. Untuk alasan ini, saya mencoba mencari suku cadang untuk mesin dalam penjualan gratis dengan minimum logam, ada yang dipesan di Cina, ada yang dibeli di toko mobil dan konstruksi, ada yang selesai di garasi teman. Beberapa detail masih harus dipesan oleh turner.Alat dan bahan
Alat:
- Obeng (dengan satu set bor dan bit)
- Set kunci pas dan obeng
- Besi solder, fluks, solder
- File, file
- Pengelasan semi-otomatis
Bahan:
- Chipboard furnitur 16mm
- Membangun pengencang
- Pipa baja diameter 12mm, panjang 1m
- Berbagai macam mur, baut, sekrup, ring
- , ,
:
- Nema 23
- TB6600
- 608
- CPLD EPM570
- 12 6,5
- 5 3
Saya pikir dengan alat dan bahan semuanya jelas, saya akan memikirkan detailnya lebih detail. Harga saat ini pada April 2015. Saya membeli dua motor stepper di bawah iklan untuk 10 cu sepotong. Driver dan kopling , serta konverter pulsa , ~ 12, ~ 6 dan ~ 2 c.u. masing-masing, dipesan dari Cina. Bantalan dibeli di toko mobil dengan harga 0,5 cu sepotong. Fee Mars rover dipesan di situs web dengan nama yang sama. Catu daya tergeletak tidak perlu di rumah. Soket dan optocoupler ditemukan di suku cadang yang tersisa setelah membongkar printer.Karena mesin itu dibuat dari awal, banyak bagian harus dicari untuk waktu yang lama, hanya memiliki gambaran kasar tentang bagaimana mereka harus terlihat. Saya menemukan metode berikut untuk diri saya: kita pergi ke toko mobil atau toko bahan bangunan dan mencari sesuatu yang serupa, jika perlu, kita selesai dengan file.Sejarah penciptaan
Pada musim dingin 2013, dalam persiapan liburan Tahun Baru, saya mencari informasi tentang pembuatan bola-bola benang dan lem, yang digunakan sebagai dekorasi. Saya menemukan foto bola yang jelas bukan buatan tangan. Setelah mempelajari topik tersebut, saya mengetahui bahwa bola-bola seperti itu dibuat oleh seorang amatir tertentu dari Moskow dengan mesin buatan mereka sendiri. Mesin itu mekanis. Selain referensi ke beberapa forum di Rusia dan satu di segmen asing jaringan, saya tidak menemukan yang lain. Saya mendapat ide untuk membuat mesin CNC untuk menggulung bola seperti itu.Dia mulai mempelajari topik ini lebih jauh. Saya belajar bahwa jenis belitan serupa digunakan untuk membuat silinder bertekanan tinggi dari berbagai bentuk komposit. Saya melihat paten tentang topik belitan. Kesimpulannya adalah sebagai berikut, semua perkembangan pada desain mesin tersebut dapat dibagi menjadi 2 kelompok: mesin dengan dua mesin dan mesin dengan tiga mesin. Keuntungan dari yang pertama adalah dalam kesederhanaan bagian mekanik, dan karena itu dalam massa dan mobilitas mesin, serta dalam menghemat satu mesin, yang jelas keuntungan dari yang terakhir dalam kemudahan kontrol.Diputuskan untuk mengembangkan mesin sesuai dengan skema dengan dua mesin. Karena saya seorang programmer, saya tidak melihat masalah dalam manajemen. Persyaratan untuk alat berat tersebut adalah sebagai berikut: anggaran minimum, dimensi dan berat kecil, kebisingan dan mobilitas. Juga diputuskan untuk membuat mesin otonom, yaitu, tanpa diikat ke komputer, sehingga memungkinkan untuk dioperasikan dengan satu outlet 220 volt. Karena saya saat ini adalah pengembang FPGA, diputuskan untuk membuat kontrol mesin pada FPGA (atau lebih tepatnya CPLD ). Pilihan jatuh di papan Mars rover. Di sini pilihannya sederhana - sudah dibeli dan sumber dayanya untuk perhitungan manajemen seharusnya sudah cukup. Saya akan berjalan sedikit ke depan dan mengatakan bahwa saat ini kemampuan untuk mengontrol mesin dari PC ditambahkan, serta versi otonom dengan Arduino .Mekanika
Saat ini, ketika hampir semua orang membuat mesin CNC dan printer 3D, banyak artikel telah ditulis tentang pilihan komponen, saya tidak akan membahas hal ini secara rinci.Poros dan rumah bantalan dipesan melalui teman desain di pabrik.Kami memesan detail kasing mesin dari furnitur chipboard. Murah dan ceria. Kemudian kami menandai dan mengebor lubang untuk pemasangan dan rumah bantalan. Kami merakit kasing Euro . Bantalan ditekan ke dalam housing dan semua rakitan ini dipasang pada housing. Saat merakit, saya menggunakan sekrup "hexagon internal", ada beberapa keindahan estetika di dalamnya, serta mur pengunci sendiri.Poros dibuat dengan pas longgar, karena beban pada mereka kecil. Kami menempatkan mereka dengan tangan dengan sedikit usaha. Unit pemasangan motor stepper ke rumah bantalan diulang berkali-kali. Alasannya adalah persyaratan untuk bersuara. Motor stepper bergetar sangat banyak.
Unit pemasangan motor stepper ke rumah bantalan diulang berkali-kali. Alasannya adalah persyaratan untuk bersuara. Motor stepper bergetar sangat banyak.Perangi ini dengan beberapa cara:
- Langkah penghancuran (diimplementasikan dalam elektronik) +
- Driver motor stepper mahal berkualitas tinggi (kami memiliki anggaran, jadi drivernya murah) -
- Kopling berkualitas tinggi dengan insert polyurethane +
- Damper mount +
- Peningkatan massa mesin (hingga menuangkan ke fondasi, mesin kami harus bergerak) -
Alhasil, saya sampai pada desain mount berikutnya, yang pada dasarnya adalah damper. Tutup untuk badan mobil dibeli, diameter pendaratan 10mm. Kami mengebor lubang di dalamnya dengan bor berbentuk tabung 5 mm untuk ubin. Selanjutnya, kita ambil braket, bengkokkan dalam bentuk huruf "P", bor lubang koaksial dan mendorong busi di sana. Sumbat karet bersama dengan sisipan poliuretan dalam kopling benar-benar meredam getaran. Kemudian saya masih harus meminta bantuan teman. Empat bagian mesin harus dibuat dengan pengelasan. Dudukan dua-pneumoform (bola), penumpuk pneumoform, dan braket. Kami pergi ke seorang teman di garasi dan meminta untuk menggunakan perangkat semi otomatis otomatis. Kami tidak melihat jahitannya, tukang las dari saya sedikit lebih baik daripada tidak sama sekali. Selanjutnya, kami memasang braket untuk memasang tangki lem ke penumpuk. Braket dilas dari penjepit pipa dan pelat logam, kemudian dibor bersama dengan stacker. Pemegang pneumoform dilas dari belahan lanyard dengan onderdil mobil. Mesin cuci besar adalah dari pemasangan roda cadangan dari VAZ, yang kecil adalah mesin cuci rak dari itu. Kami meletakkan semuanya di tempatnya, mekanik sudah siap.
Kemudian saya masih harus meminta bantuan teman. Empat bagian mesin harus dibuat dengan pengelasan. Dudukan dua-pneumoform (bola), penumpuk pneumoform, dan braket. Kami pergi ke seorang teman di garasi dan meminta untuk menggunakan perangkat semi otomatis otomatis. Kami tidak melihat jahitannya, tukang las dari saya sedikit lebih baik daripada tidak sama sekali. Selanjutnya, kami memasang braket untuk memasang tangki lem ke penumpuk. Braket dilas dari penjepit pipa dan pelat logam, kemudian dibor bersama dengan stacker. Pemegang pneumoform dilas dari belahan lanyard dengan onderdil mobil. Mesin cuci besar adalah dari pemasangan roda cadangan dari VAZ, yang kecil adalah mesin cuci rak dari itu. Kami meletakkan semuanya di tempatnya, mekanik sudah siap. Kami membuat spool holder dengan benang dari sepotong tabung aluminium, yang kami tekuk dengan busur, pasang braket berbentuk U di atasnya. Kami memasang cincin dari pancing di tabung menggunakan benang lem dan panas menyusut .
Kami membuat spool holder dengan benang dari sepotong tabung aluminium, yang kami tekuk dengan busur, pasang braket berbentuk U di atasnya. Kami memasang cincin dari pancing di tabung menggunakan benang lem dan panas menyusut .
Elektronik
 Jadi, mari kita mulai dengan nutrisi. Motor stepper mengkonsumsi maksimum 3 ampere, driver motor stepper dan papan rover Mars mengkonsumsi jumlah yang diabaikan, sehingga mereka dapat diabaikan dalam perhitungan. Catu daya 6,5 amp harus cukup. Papan rover Mars dapat diaktifkan dengan tegangan 5 atau 3,3 volt, driver shagoviks adalah 8-40 volt. Kami memberi makan driver langsung dari catu daya, dan papan rover Mars melalui konverter DC-DC 5 volt. Driver memiliki isolasi-opto sesuai dengan sinyal.Sedikit tentang langkah-langkah. Sudut satu langkah di tambang adalah 1,8 derajat, yaitu, untuk membuat revolusi lengkap, ia perlu mengambil dua ratus langkah penuh. Dalam desain saya, stacker harus sedikit kurang dari 180 derajat. Kenapa sedikit kurang? Untuk membentuk lubang di kutub. Untuk bola dengan diameter 38 cm, kita mendapatkan sekitar 158 derajat, itu sekitar 88 langkah penuh. Motor stepper dikendalikan oleh pengemudi. Driver kami adalah rangkaian mikro TB6600 khusus dengan harness, yang juga menyediakan antarmuka sederhana untuk mengendalikan motor stepper, yang disebut Step / Dir . Antarmuka digital dan sangat sederhana, pulsa dikirim ke input Langkah, dalam mode langkah penuh satu pulsa adalah satu langkah, input Dir bertanggung jawab untuk arah. Kami memaparkannya ke nol, langkah berputar di satu arah, dalam satu unit - di lain.Untuk mengatur ke nol (posisi awal), Anda memerlukan sensor, kami mengambil optocoupler dari printer, saya tidak menemukan datasheet di atasnya, tetapi karakteristik optocoupler di printer dari berbagai produsen berbeda. Kami menyelesaikan sedikit, karena tidak ada resistor yang membatasi arus dan pull-up di papan tulis. Kami memotong trek, solder resistor dengan pemasangan permukaan, ternyata sensor murah. Prinsip aksinya adalah ini, pada stacker kami mengatur bendera yang terbuat dari plastik (bahan buram). Dalam keadaan terbuka, sensor memberikan unit, dan ketika bendera jatuh ke celahnya, nol.Kami membuat panel kontrol dari rintisan di bawah CD-Rom dari unit sistem, kami melampirkannya ke kasing mesin pada braket improvisasi. Kami menempatkannya 3 tombol tanpa memperbaiki dan 3 switch. Penugasan tombol: mengatur posisi awal, memulai, menjeda, mengalihkan penugasan - mengubah kecepatan penumpuk (polanya tergantung pada ini). Kami memiliki 2 ^ 3 status sakelar, mis. 8 kecepatan.
Jadi, mari kita mulai dengan nutrisi. Motor stepper mengkonsumsi maksimum 3 ampere, driver motor stepper dan papan rover Mars mengkonsumsi jumlah yang diabaikan, sehingga mereka dapat diabaikan dalam perhitungan. Catu daya 6,5 amp harus cukup. Papan rover Mars dapat diaktifkan dengan tegangan 5 atau 3,3 volt, driver shagoviks adalah 8-40 volt. Kami memberi makan driver langsung dari catu daya, dan papan rover Mars melalui konverter DC-DC 5 volt. Driver memiliki isolasi-opto sesuai dengan sinyal.Sedikit tentang langkah-langkah. Sudut satu langkah di tambang adalah 1,8 derajat, yaitu, untuk membuat revolusi lengkap, ia perlu mengambil dua ratus langkah penuh. Dalam desain saya, stacker harus sedikit kurang dari 180 derajat. Kenapa sedikit kurang? Untuk membentuk lubang di kutub. Untuk bola dengan diameter 38 cm, kita mendapatkan sekitar 158 derajat, itu sekitar 88 langkah penuh. Motor stepper dikendalikan oleh pengemudi. Driver kami adalah rangkaian mikro TB6600 khusus dengan harness, yang juga menyediakan antarmuka sederhana untuk mengendalikan motor stepper, yang disebut Step / Dir . Antarmuka digital dan sangat sederhana, pulsa dikirim ke input Langkah, dalam mode langkah penuh satu pulsa adalah satu langkah, input Dir bertanggung jawab untuk arah. Kami memaparkannya ke nol, langkah berputar di satu arah, dalam satu unit - di lain.Untuk mengatur ke nol (posisi awal), Anda memerlukan sensor, kami mengambil optocoupler dari printer, saya tidak menemukan datasheet di atasnya, tetapi karakteristik optocoupler di printer dari berbagai produsen berbeda. Kami menyelesaikan sedikit, karena tidak ada resistor yang membatasi arus dan pull-up di papan tulis. Kami memotong trek, solder resistor dengan pemasangan permukaan, ternyata sensor murah. Prinsip aksinya adalah ini, pada stacker kami mengatur bendera yang terbuat dari plastik (bahan buram). Dalam keadaan terbuka, sensor memberikan unit, dan ketika bendera jatuh ke celahnya, nol.Kami membuat panel kontrol dari rintisan di bawah CD-Rom dari unit sistem, kami melampirkannya ke kasing mesin pada braket improvisasi. Kami menempatkannya 3 tombol tanpa memperbaiki dan 3 switch. Penugasan tombol: mengatur posisi awal, memulai, menjeda, mengalihkan penugasan - mengubah kecepatan penumpuk (polanya tergantung pada ini). Kami memiliki 2 ^ 3 status sakelar, mis. 8 kecepatan. Sekarang lebih banyak tentang program manajemen. Ingat, ketika kami memilih skema konstruksi mesin dengan dua mesin, saya menyebutkan kompleksitas bagian elektroniknya. Stacker harus bergerak tidak hanya linier, tetapi menurut semacam hukum yang tidak bisa dipahami, harus melambat di kutub dan mempercepat di ekuator. Lintasannya menyerupai pergerakan satelit di orbit, karenanya dinamai mesin - Orbiter. Kami mendapatkan buku referensi tentang trigonometri, yang tidak membuka kursus dari universitas ke-3 dan membaca dengan cermat. Kami membaca, membaca, menutup dan meletakkannya kembali di rak. Tidak mudah untuk mendapatkan formula. Kami akan melalui rekayasa. Kami mengambil bola, meletakkan benang di atasnya, bagaimana ia harus berbaring ketika berkelok-kelok, lingkaran dengan spidol, tandai. Selanjutnya, ambil poinnya, interpolasi, sesuka hati, kami membuat grafik, kami mendapatkan formula. Teka-teki telah berkembang, kecepatan berubah sesuai dengan hukum tangensial. Perhitungan fungsi trigonometri pada FPGA adalah tugas yang tidak sepele dan cukup mahal dalam hal sumber daya, jadi kami menolak gagasan implementasi ini. Kami akan melakukannya dengan lebih mudah, memasukkan ke dalam array nilai-nilai fungsi yang sudah dihitung sebelumnya.Saya tidak akan menjelaskan secara rinci pembuatan program untuk FPGA, kemungkinan besar saya akan melakukan artikel tentang ini nanti. Saya hanya bisa mengatakan bahwa program ini ditulis dalam bahasa Verilog di lingkungan Altera Quartus dan diimplementasikan sebagai mesin negara, dengan fungsi untuk mengatur ke nol, mulai, jeda, dan ubah kecepatan. Driver langkah memiliki dukungan step split1/2, 1/4, 1/8 dan 1/16. Pengujian menunjukkan bahwa mesin bekerja paling diam ketika menghancurkan langkah 1/16 pada mesin stacker. Perubahan dalam penghancuran pitch pada mesin cetakan pneumatik hampir tidak berpengaruh pada tingkat kebisingan.Mesin ini dikembangkan di waktu luangnya sebagai hobi, dan karena itu pembangunannya tertunda selama hampir satu tahun. Diameter bola untuk belitan 200 - 400 milimeter, tetapi Anda dapat meningkatkannya jika diinginkan, perubahan khusus tidak akan diperlukan. Benang yang digunakan adalah jahit biasa, lem akrilik, bola PVC, karena lem ini memiliki daya rekat rendah terhadap PVC. Bola dipasang di pemegang pada pita dua sisi dan preload kecil. Kesimpulannya, video singkat tentang proses mesin dan beberapa foto dari pekerjaan yang selesai.
Sekarang lebih banyak tentang program manajemen. Ingat, ketika kami memilih skema konstruksi mesin dengan dua mesin, saya menyebutkan kompleksitas bagian elektroniknya. Stacker harus bergerak tidak hanya linier, tetapi menurut semacam hukum yang tidak bisa dipahami, harus melambat di kutub dan mempercepat di ekuator. Lintasannya menyerupai pergerakan satelit di orbit, karenanya dinamai mesin - Orbiter. Kami mendapatkan buku referensi tentang trigonometri, yang tidak membuka kursus dari universitas ke-3 dan membaca dengan cermat. Kami membaca, membaca, menutup dan meletakkannya kembali di rak. Tidak mudah untuk mendapatkan formula. Kami akan melalui rekayasa. Kami mengambil bola, meletakkan benang di atasnya, bagaimana ia harus berbaring ketika berkelok-kelok, lingkaran dengan spidol, tandai. Selanjutnya, ambil poinnya, interpolasi, sesuka hati, kami membuat grafik, kami mendapatkan formula. Teka-teki telah berkembang, kecepatan berubah sesuai dengan hukum tangensial. Perhitungan fungsi trigonometri pada FPGA adalah tugas yang tidak sepele dan cukup mahal dalam hal sumber daya, jadi kami menolak gagasan implementasi ini. Kami akan melakukannya dengan lebih mudah, memasukkan ke dalam array nilai-nilai fungsi yang sudah dihitung sebelumnya.Saya tidak akan menjelaskan secara rinci pembuatan program untuk FPGA, kemungkinan besar saya akan melakukan artikel tentang ini nanti. Saya hanya bisa mengatakan bahwa program ini ditulis dalam bahasa Verilog di lingkungan Altera Quartus dan diimplementasikan sebagai mesin negara, dengan fungsi untuk mengatur ke nol, mulai, jeda, dan ubah kecepatan. Driver langkah memiliki dukungan step split1/2, 1/4, 1/8 dan 1/16. Pengujian menunjukkan bahwa mesin bekerja paling diam ketika menghancurkan langkah 1/16 pada mesin stacker. Perubahan dalam penghancuran pitch pada mesin cetakan pneumatik hampir tidak berpengaruh pada tingkat kebisingan.Mesin ini dikembangkan di waktu luangnya sebagai hobi, dan karena itu pembangunannya tertunda selama hampir satu tahun. Diameter bola untuk belitan 200 - 400 milimeter, tetapi Anda dapat meningkatkannya jika diinginkan, perubahan khusus tidak akan diperlukan. Benang yang digunakan adalah jahit biasa, lem akrilik, bola PVC, karena lem ini memiliki daya rekat rendah terhadap PVC. Bola dipasang di pemegang pada pita dua sisi dan preload kecil. Kesimpulannya, video singkat tentang proses mesin dan beberapa foto dari pekerjaan yang selesai.

 Seperti yang saya tulis di atas, versi program kontrol melalui Arduino sedang dikembangkan, serta program PC untuk kontrol melalui USB. Sumber daya papan rover Mars terbatas, jadi Anda tidak akan mendapatkan banyak pola berliku, program PC akan menyelesaikan masalah ini.Harapan yang menginspirasi seseorang untuk menciptakan sesuatu yang baru. Buat, buat, dengan kemampuan modern - mudah.
Seperti yang saya tulis di atas, versi program kontrol melalui Arduino sedang dikembangkan, serta program PC untuk kontrol melalui USB. Sumber daya papan rover Mars terbatas, jadi Anda tidak akan mendapatkan banyak pola berliku, program PC akan menyelesaikan masalah ini.Harapan yang menginspirasi seseorang untuk menciptakan sesuatu yang baru. Buat, buat, dengan kemampuan modern - mudah. Source: https://habr.com/ru/post/id381947/
All Articles