Seorang astronot dengan ISS akan mengendalikan kendaraan segala medan dengan manipulator di Bumi
 Andreas Mogensen, seorang kosmonot Eropa dari upeti, dikirim pada awal bulan ke ISS oleh roket Soyuz, hari ini akan terlibat dalam percobaan Interaksi unik di atas stasiun . Ini akan mengontrol robot semua medan umpan balik dari jarak jauh.Kendaraan semua medan akan naik dan memanipulasi manipulator di hanggar pusat teknis ESTEC (Pusat Eropa untuk Penelitian dan Teknologi Ruang Angkasa). Ini adalah pusat pengembangan dan pengujian teknologi utama di Belanda, yang dimiliki oleh ESA, Badan Antariksa Eropa.Pengujian kendaraan semua medan akan berlangsung dalam tiga tahap. Pertama, astronot akan memeriksa koneksi dengan robot dalam waktu setengah jam. Kemudian dia akan mulai mengontrol gerakannya dan memeriksa operasi manipulator yang mampu bekerja dengan akurasi submillimeter. Pada tahap akhir, Mogensen akan mencoba menggunakan manipulator untuk mengatur pasak khusus di lubang disiapkan dari meja kerja kecil.Percobaan ini diselenggarakan oleh laboratorium untuk kendali jarak jauh robot dan heptik (Telerobotics & Haptics Lab), bekerja dalam kerangka ESTEC. Heptika adalah teknologi untuk mengendalikan robot jarak jauh yang dilengkapi dengan sensor umpan balik. Teknologi ini memungkinkan ahli bedah untuk mengoperasikan pasien dari jarak jauh, dengan fokus pada pengembalian jaringan, dan, misalnya, astronot dari kapal orbital untuk bekerja dengan manipulator robot yang terletak di permukaan planet.Kendaraan segala medan dilengkapi dengan manipulator presisi tinggi dari perusahaan Jerman KUKA . Robot mereka bekerja di berbagai industri - mereka merakit mobil, tumpukan palet dengan produk jadi, mentransfer kaca kosong, bekerja di pabrik baja pada suhu tinggi.Manipulator kendaraan semua medan dilengkapi dengan berbagai sensor umpan balik - mereka dapat "dengan lembut" memanipulasi berbagai objek yang rapuh, membatasi beban pada mereka, dan beradaptasi dengan gerakan tangan operator.
Andreas Mogensen, seorang kosmonot Eropa dari upeti, dikirim pada awal bulan ke ISS oleh roket Soyuz, hari ini akan terlibat dalam percobaan Interaksi unik di atas stasiun . Ini akan mengontrol robot semua medan umpan balik dari jarak jauh.Kendaraan semua medan akan naik dan memanipulasi manipulator di hanggar pusat teknis ESTEC (Pusat Eropa untuk Penelitian dan Teknologi Ruang Angkasa). Ini adalah pusat pengembangan dan pengujian teknologi utama di Belanda, yang dimiliki oleh ESA, Badan Antariksa Eropa.Pengujian kendaraan semua medan akan berlangsung dalam tiga tahap. Pertama, astronot akan memeriksa koneksi dengan robot dalam waktu setengah jam. Kemudian dia akan mulai mengontrol gerakannya dan memeriksa operasi manipulator yang mampu bekerja dengan akurasi submillimeter. Pada tahap akhir, Mogensen akan mencoba menggunakan manipulator untuk mengatur pasak khusus di lubang disiapkan dari meja kerja kecil.Percobaan ini diselenggarakan oleh laboratorium untuk kendali jarak jauh robot dan heptik (Telerobotics & Haptics Lab), bekerja dalam kerangka ESTEC. Heptika adalah teknologi untuk mengendalikan robot jarak jauh yang dilengkapi dengan sensor umpan balik. Teknologi ini memungkinkan ahli bedah untuk mengoperasikan pasien dari jarak jauh, dengan fokus pada pengembalian jaringan, dan, misalnya, astronot dari kapal orbital untuk bekerja dengan manipulator robot yang terletak di permukaan planet.Kendaraan segala medan dilengkapi dengan manipulator presisi tinggi dari perusahaan Jerman KUKA . Robot mereka bekerja di berbagai industri - mereka merakit mobil, tumpukan palet dengan produk jadi, mentransfer kaca kosong, bekerja di pabrik baja pada suhu tinggi.Manipulator kendaraan semua medan dilengkapi dengan berbagai sensor umpan balik - mereka dapat "dengan lembut" memanipulasi berbagai objek yang rapuh, membatasi beban pada mereka, dan beradaptasi dengan gerakan tangan operator.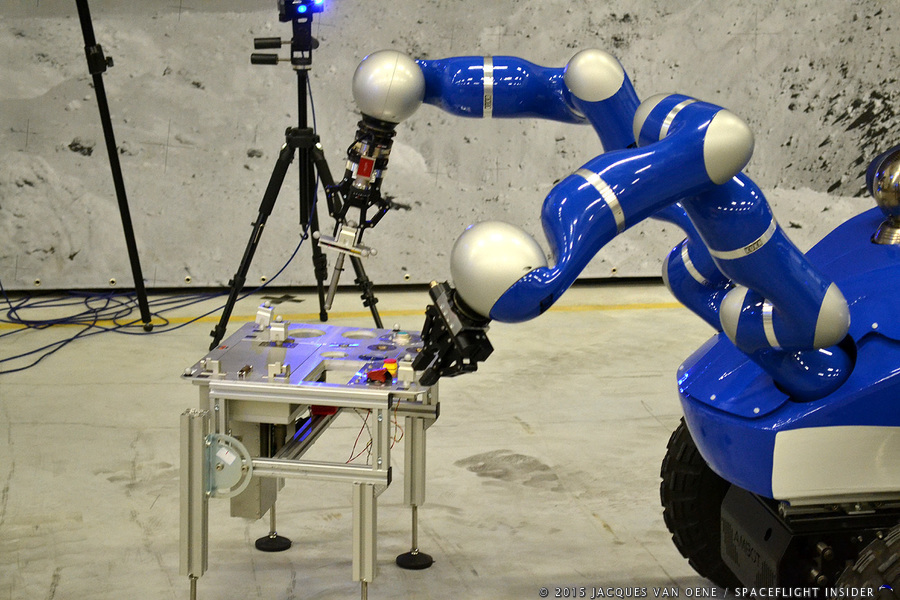 Selain itu, kendaraan semua medan memiliki empat kamera. Kamera utama di bagian atas memungkinkan Anda bernavigasi di ruang angkasa, kamera di salah satu manipulator memberikan kerja yang akurat dengan objek, dan kamera depan dan belakang meningkatkan keamanan saat menggerakkan kendaraan semua medan.Tidak hanya pekerjaan jarak jauh dengan kendaraan segala medan yang diuji - ini bisa dilakukan dari ruang tetangga. Justru kontrol robot dari orbit yang diperiksa untuk menemukan kemungkinan kesulitan yang tidak terduga terkait dengan operasi ini. Selain itu, dalam hal ini, sinyalnya harus sulit. Ini akan melakukan perjalanan dari ISS melalui sistem satelit NASA TDRSS (Sistem Satelit untuk Pelacakan dan Transmisi Data), kemudian akan mencapai stasiun darat di Amerika Serikat, menyeberangi Atlantik dan mencapai Belanda. Secara total, panjang jalur sinyal bisa 90.000 km, akibatnya keterlambatan komunikasi hingga 1 detik akan terjadi.Pesawat ruang angkasa Soyuz TMA-18M berhasil diluncurkanPada pagi hari tanggal 2 September, menggunakan kendaraan peluncuran Soyuz-FG dari Baikonur Cosmodrome. Di atas kapal adalah Denmark Andreas Mogensen, Kazakhstani Aydin Aimbetov dan komandan awak Rusia Sergei Volkov. Pesawat ruang angkasa mendekati Stasiun Luar Angkasa Internasional selama dua hari, berhasil menghindari roket Jepang dari puing-puing , dan berlabuh ke ISS pada 4 September.
Selain itu, kendaraan semua medan memiliki empat kamera. Kamera utama di bagian atas memungkinkan Anda bernavigasi di ruang angkasa, kamera di salah satu manipulator memberikan kerja yang akurat dengan objek, dan kamera depan dan belakang meningkatkan keamanan saat menggerakkan kendaraan semua medan.Tidak hanya pekerjaan jarak jauh dengan kendaraan segala medan yang diuji - ini bisa dilakukan dari ruang tetangga. Justru kontrol robot dari orbit yang diperiksa untuk menemukan kemungkinan kesulitan yang tidak terduga terkait dengan operasi ini. Selain itu, dalam hal ini, sinyalnya harus sulit. Ini akan melakukan perjalanan dari ISS melalui sistem satelit NASA TDRSS (Sistem Satelit untuk Pelacakan dan Transmisi Data), kemudian akan mencapai stasiun darat di Amerika Serikat, menyeberangi Atlantik dan mencapai Belanda. Secara total, panjang jalur sinyal bisa 90.000 km, akibatnya keterlambatan komunikasi hingga 1 detik akan terjadi.Pesawat ruang angkasa Soyuz TMA-18M berhasil diluncurkanPada pagi hari tanggal 2 September, menggunakan kendaraan peluncuran Soyuz-FG dari Baikonur Cosmodrome. Di atas kapal adalah Denmark Andreas Mogensen, Kazakhstani Aydin Aimbetov dan komandan awak Rusia Sergei Volkov. Pesawat ruang angkasa mendekati Stasiun Luar Angkasa Internasional selama dua hari, berhasil menghindari roket Jepang dari puing-puing , dan berlabuh ke ISS pada 4 September.Source: https://habr.com/ru/post/id383841/
All Articles