Quadcopters - bagaimana semuanya dimulai?
Copter quadro (hexa, octo) modern adalah perangkat “komputasi” yang cukup kuat yang dapat dikontrol dari smartphone melalui WiFi, bertahan di satu titik, terbang di sepanjang rute, dll. Siapa pun dapat membeli perangkat seperti itu sekarang. Bagaimana semua itu dimulai?Bagaimana cara terbang quadrocopter?
Untuk memahami esensi dari solusi teknis, kita akan memahami sedikit bagaimana quadrocopter terbang. Faktanya, quadrocopter adalah sistem yang tidak stabil. Jika Anda mengambil 4 motor, dan hanya menghubungkannya ke baterai, quadrocopter tidak akan terbang ke mana pun, itu hanya akan terguling. daya cengkeram motor tidak akan pernah identik. Dan kemudian elektronik mulai berlaku. Di papan quadrocopter ada "papan kontrol" pusat, bagian kuncinya adalah unit sensor. Dalam kasus paling sederhana, ini adalah giroskop tiga sumbu. Mikrokontroler secara konstan membaca data dari giroskop, dan begitu giroskop “merasakan” kemiringan di sepanjang sumbu apa pun, pengontrol memerintahkan motor yang sesuai untuk sedikit meningkatkan atau mengurangi kecepatan untuk mengimbangi kemiringan. Secara umum, seluruh logika - dengan pengecualian banyak segalanya (pengontrol PID, teori kontrol, filter Kalman),tidak ada yang rumit (lelucon). Nah, untuk pengguna semuanya sangat transparan. Tidak ada bagian yang bergerak kecuali motor di quadrocopter, semua kontrol dilakukan secara eksklusif dengan mengubah rotasi putaran mesin (dengan putaran yang sama - kami mengubah kecepatan rotasi, kami memperoleh torsi). Sekarang kembali ke ceritanya.Perhatian, lalu lintas.Mikrokopter
Perusahaan Jerman yang legendaris, terima kasih kepada para insinyur yang pada tahun 2006 perangkat pertama kali muncul. Pengontrol memiliki prosesor Atmega644 di papan dengan memori 4K dan frekuensi hingga 20 MHz, 3 giroskop pada setiap sumbu, akselerometer (untuk penerbangan horizontal) dan barometer untuk mempertahankan ketinggian (akurasi barometer MPX4115A sekitar 1 m). Kemudian, modul tambahan muncul, misalnya GPS untuk memegang posisi.Sekarang Anda dapat menemukan video di youtube tentang bagaimana semuanya terbang (2007).Secara umum, sistem itu sangat sukses. Produk mereka tidak pernah murah, label harganya mulai dari 1500 Euro. Perusahaan ada sekarang, mereka memproduksi perangkat profesional, kategori harga yang sesuai. Dan poin penting lainnya - pada awalnya, pencipta Microcopter membuat kode sumber terbuka. Tentu saja, dalam waktu dekat berbagai klon (termasuk yang dibuat di Federasi Rusia) mulai muncul, ini tentu saja berdampak negatif pada penjualan, dan kemudian kode ditutup. Tapi tetap saja, saya pikir ini menjadi dorongan besar untuk penciptaan berbagai jenis multicopter.Kami MikroKopter tidak populer karena harganya, dan tidak ada banyak pemilik. Namun, dorongan diberikan kepada komunitas dunia, dan berbagai sistem mulai muncul.Kaptainkuk
Salah satu sistem paling sederhana yang diproduksi (dalam berbagai versi) dari 2010 hingga saat ini. Papan kontrol hanya memiliki 3 giroskop, resistor variabel biasa digunakan untuk menyesuaikan parameter.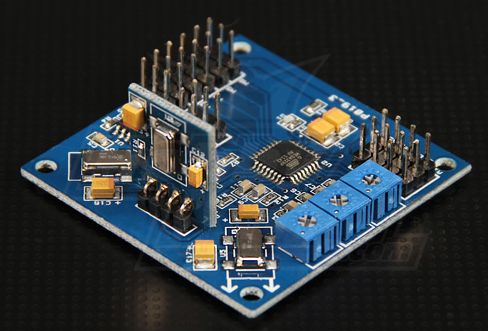 (Foto dari Hobbyking.com) Papanseperti itu sekarang harganya hanya sekitar $ 15, seperti yang Anda lihat, di atas, di samping giroskop dan prosesor yang lemah, secara umum, tidak ada apa-apa. Firmware dalam kode sumber untuk KK tersedia secara bebas di Internet, siapa pun dapat mengunduhnya dengan mengetikkan nama file "kk2_1V1.zip" di pencarian Google (ukurannya hanya 90Kb). Ini mungkin versi pertama dan terakhir dari firmware copter, yang ditulis secara assembler.
(Foto dari Hobbyking.com) Papanseperti itu sekarang harganya hanya sekitar $ 15, seperti yang Anda lihat, di atas, di samping giroskop dan prosesor yang lemah, secara umum, tidak ada apa-apa. Firmware dalam kode sumber untuk KK tersedia secara bebas di Internet, siapa pun dapat mengunduhnya dengan mengetikkan nama file "kk2_1V1.zip" di pencarian Google (ukurannya hanya 90Kb). Ini mungkin versi pertama dan terakhir dari firmware copter, yang ditulis secara assembler.Multiwii
Tonggak berikutnya dalam pengembangan copters adalah sistem MultiWii. Nama itu berasal dari gamer Nintendo Wii dan Wii Nunchuk, yang dibongkar oleh pengrajin, dan mengeluarkan papan dengan sensor dari sana. Arduino Nano digunakan sebagai prosesor sentral.Tampilan papan ternyata seperti ini (foto dari situs web rcgroups, 2010):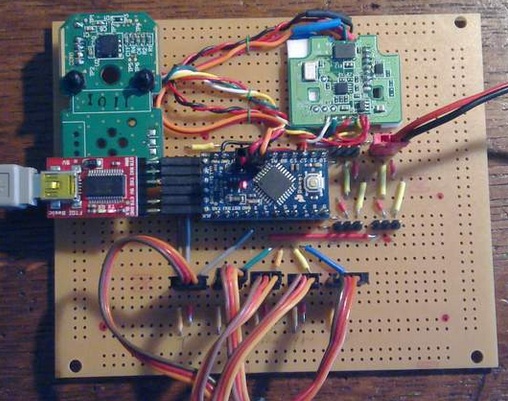 Namun, dalam beberapa tahun sistem telah berevolusi, dan papan terakhir (mereka dijual sekarang, harganya $ 20-30) terlihat seperti ini:
Namun, dalam beberapa tahun sistem telah berevolusi, dan papan terakhir (mereka dijual sekarang, harganya $ 20-30) terlihat seperti ini: (foto dari situs Hobbyking.com)Versi terbaru MultiWii memiliki sensor yang cukup bagus, mereka dapat menggantung di suatu titik di GPS, menahan ketinggian dan kembali ke rumah. Karena Multiwii ditulis untuk Arduino, semua papan tetap kompatibel dengan Arduino, kode sumbernya dapat diunduh di Github. Salah satu kelemahan MultiWii adalah prosesornya yang lemah, yang membatasi kemampuan komputasi dari algoritma, kemudian klon pada STM32 mulai muncul, tetapi mereka tidak membuat cuaca, seperti dalam hal perangkat keras, setiap quadrocopter cukup sederhana, 95% dari kompleksitas terletak persis pada kode. Pada saat yang sama, saya yakin bahwa itu adalah sumber MultiWii yang menjadi dasar dari semua sistem komersial saat ini.
(foto dari situs Hobbyking.com)Versi terbaru MultiWii memiliki sensor yang cukup bagus, mereka dapat menggantung di suatu titik di GPS, menahan ketinggian dan kembali ke rumah. Karena Multiwii ditulis untuk Arduino, semua papan tetap kompatibel dengan Arduino, kode sumbernya dapat diunduh di Github. Salah satu kelemahan MultiWii adalah prosesornya yang lemah, yang membatasi kemampuan komputasi dari algoritma, kemudian klon pada STM32 mulai muncul, tetapi mereka tidak membuat cuaca, seperti dalam hal perangkat keras, setiap quadrocopter cukup sederhana, 95% dari kompleksitas terletak persis pada kode. Pada saat yang sama, saya yakin bahwa itu adalah sumber MultiWii yang menjadi dasar dari semua sistem komersial saat ini.Arducopter
Sistem berbasis Arduino lain berjalan paling jauh. Sekarang ini adalah sistem dengan kemungkinan penerbangan terprogram titik-ke-titik, dukungan untuk modem radio dan transmisi telemetri, penyimpanan berbagai log, dll.Perangkat lunak mereka terlihat seperti ini: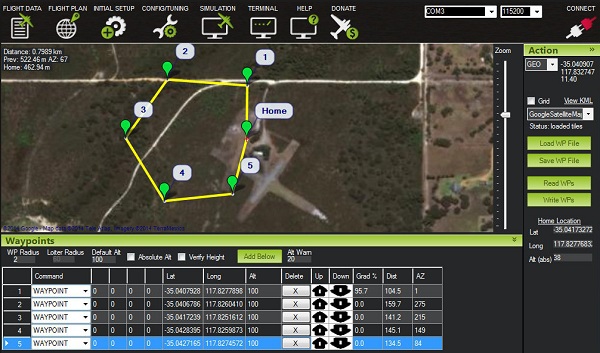 Papan telah berevolusi dari ini: Papan
Papan telah berevolusi dari ini: Papan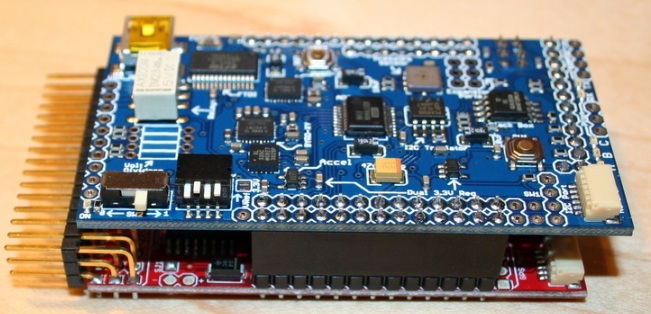 seperti
seperti ini dijual sekarang, harganya mulai $ 50 (per klon) hingga $ 250 untuk versi aslinya. Kode sumber Ardupilot juga sepenuhnya tersedia di github, dan jika dilihat dari jumlah komitmen, proyek ini sedang aktif dikembangkan. Sistem ini tidak kalah mutunya dengan perangkat profesional, kualitas penerbangan dapat dilihat dalam video:Semuanya keren di sini, kecuali untuk satu "tetapi" - itu adalah Open Source, dengan semua konsekuensi berikutnya. Sistem ini terbuka, diselesaikan oleh penggemar, dan tidak ada yang menjamin apa pun, termasuk tidak adanya bug dalam perangkat lunak. Jika quadrocopter jatuh pada BMW orang lain, tidak akan ada orang yang mengeluh.
ini dijual sekarang, harganya mulai $ 50 (per klon) hingga $ 250 untuk versi aslinya. Kode sumber Ardupilot juga sepenuhnya tersedia di github, dan jika dilihat dari jumlah komitmen, proyek ini sedang aktif dikembangkan. Sistem ini tidak kalah mutunya dengan perangkat profesional, kualitas penerbangan dapat dilihat dalam video:Semuanya keren di sini, kecuali untuk satu "tetapi" - itu adalah Open Source, dengan semua konsekuensi berikutnya. Sistem ini terbuka, diselesaikan oleh penggemar, dan tidak ada yang menjamin apa pun, termasuk tidak adanya bug dalam perangkat lunak. Jika quadrocopter jatuh pada BMW orang lain, tidak akan ada orang yang mengeluh.Gimbal tanpa sikat
Sejalan dengan quadrocopters, teknologi lain yang sangat menarik dikembangkan - brushless gimbal untuk kamera foto / video. Ini adalah papan terpisah dengan sensornya, yang menjaga kamera pada posisi yang diinginkan karena dua motor, mengkompensasi belokan pada sumbu yang sesuai. Mereka dikembangkan oleh rekan senegaranya kami, bagaimana suspensi bekerja, dapat dilihat di video (tahun 2013).Dapat dilihat bahwa helikopter sedang berayun, tetapi poros kamera tidak.Sekarang tidak mengherankan bagi siapa pun, dan kemudian itu merupakan terobosan nyata dalam kualitas pengambilan video.Sistem komersial
Menulis tentang mereka tidak begitu menarik, karena prinsip di sini sederhana, "bayar dan terbang." Yang pertama adalah MicroKopter tersebut, upaya berikutnya (dan tidak terlalu sukses) adalah XAircraft, perangkat Gaui populer di sektor anggaran (ini adalah perangkat anggaran pertama dengan harga sekitar $ 400 untuk helikopter siap pakai). Dan akhirnya, perusahaan yang paling sukses adalah DJI, yang hanya ditulis oleh orang malas, jadi tidak masuk akal untuk mengulanginya di sini. Mereka memasuki pasar dengan pengendali DJI Naza (dengan harga $ 200-400, dengan kemungkinan memegang posisi, kembali ke rumah), ada seri DJI Wookong profesional yang terpisah (dengan harga sekitar $ 1.000 dan stabilitas penerbangan yang lebih besar). Akhirnya, DJI memasuki pasar perangkat yang siap terbang (RTF, Ready To Fly), well, semua orang sudah tahu tentang mereka.Dan video terbaru.Anggaran quadrocopter Gaui 330 pertama. Masalah harga $ 400, 2010, tidak ada fungsi tambahan.Dji Naza v2, harga masalah adalah $ 400 yang sama, kemampuan untuk memegang posisi, kembali ke rumah, terbang di kedua sisi ke pilot (mode riang).Dji Phantom 3 - dengan gimbal kamera bawaan, kontrol ponsel cerdas, dan barang lainnya.Itu saja untuk saat ini, maaf untuk sejumlah besar video, tetapi tanpa mereka tidak ada apa-apa, kalau tidak, itu tidak akan menarik. Mari kita lihat apa yang terjadi selanjutnya, setelah 5 tahun ... Source: https://habr.com/ru/post/id384163/
All Articles