Penganalisa elektronik dari angka delapan dan oval dari roda sepeda
Jika Anda mengendarai banyak sepeda, maka kadang-kadang Anda harus memperbaikinya. Salah satu kesalahan fungsi yang harus Anda hadapi adalah delapan roda, atau oval.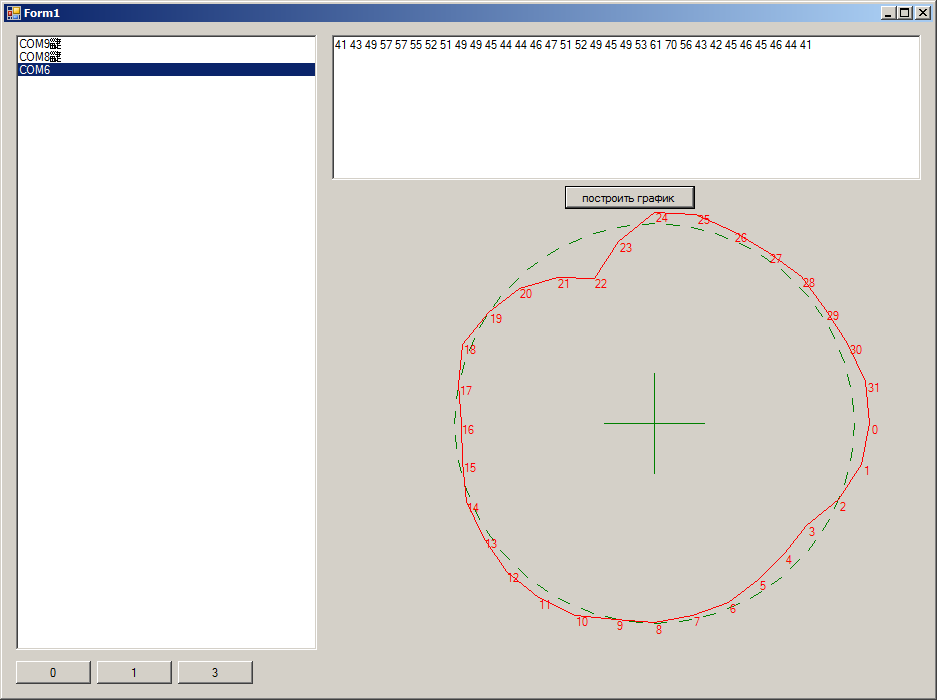 KPDV - hasil pertama mengukur ovalitas rodaUntuk waktu yang lama saya tidak bisa menyelesaikan masalah dengan roda saya, jadi saya harus merakit sistem pengukuran elektronik.Pertama, sedikit penjelasan, berapakah angka delapan dan oval dari roda?Delapan - deviasi pelek roda ke samping, sebagai akibatnya roda mengibas saat mengemudi:
KPDV - hasil pertama mengukur ovalitas rodaUntuk waktu yang lama saya tidak bisa menyelesaikan masalah dengan roda saya, jadi saya harus merakit sistem pengukuran elektronik.Pertama, sedikit penjelasan, berapakah angka delapan dan oval dari roda?Delapan - deviasi pelek roda ke samping, sebagai akibatnya roda mengibas saat mengemudi: Lonjong (atau telur) - ketika pelek tidak berada pada jarak yang sama dari sumbu roda, akibatnya roda memantul:
Lonjong (atau telur) - ketika pelek tidak berada pada jarak yang sama dari sumbu roda, akibatnya roda memantul: Dan punuk dan lubang mengarah ke roda oval.Dalam kasus sederhana, tidak sulit untuk menyesuaikan roda dengan bantuan kunci untuk jarum rajut dan mata yang tajam. Tapi saya punya kasus yang lebih rumit - setelah terbang ke rintangan di jalan, saya membungkuk sangat banyak dan meluruskannya dengan tangan, itu tidak berhasil tanpa bantuan tambahan, jadi ide muncul untuk merakit perangkat yang dapat mengukur penyimpangan dari norma.Masalah pertama yang muncul di depan saya adalah pemilihan elemen sensitif. Artinya, bagaimana mengubah kekasaran roda menjadi sinyal digital yang sesuai dengan penyimpangan? Banyak opsi yang tersedia dibuang: detektor jarak suara peka terhadap topografi permukaan, dan Anda perlu mengukur dengan tepi sempit tepi, detektor jarak pada dioda IR dan penerima IR membuat saya takut untuk alasan yang sama (tetapi ada kemungkinan bahwa itu bisa digunakan dan mereka).Setelah berpikir sebentar, saya teringat prinsip pengoperasian mikroskop pemindaian - probe bergerak di sepanjang permukaan sampel dan sepanjang defleksi probe dan bantuan diukur. Saya menyukai ide itu, dan skema yang paling sederhana dengan cepat disusun:
Dan punuk dan lubang mengarah ke roda oval.Dalam kasus sederhana, tidak sulit untuk menyesuaikan roda dengan bantuan kunci untuk jarum rajut dan mata yang tajam. Tapi saya punya kasus yang lebih rumit - setelah terbang ke rintangan di jalan, saya membungkuk sangat banyak dan meluruskannya dengan tangan, itu tidak berhasil tanpa bantuan tambahan, jadi ide muncul untuk merakit perangkat yang dapat mengukur penyimpangan dari norma.Masalah pertama yang muncul di depan saya adalah pemilihan elemen sensitif. Artinya, bagaimana mengubah kekasaran roda menjadi sinyal digital yang sesuai dengan penyimpangan? Banyak opsi yang tersedia dibuang: detektor jarak suara peka terhadap topografi permukaan, dan Anda perlu mengukur dengan tepi sempit tepi, detektor jarak pada dioda IR dan penerima IR membuat saya takut untuk alasan yang sama (tetapi ada kemungkinan bahwa itu bisa digunakan dan mereka).Setelah berpikir sebentar, saya teringat prinsip pengoperasian mikroskop pemindaian - probe bergerak di sepanjang permukaan sampel dan sepanjang defleksi probe dan bantuan diukur. Saya menyukai ide itu, dan skema yang paling sederhana dengan cepat disusun: : ( , ), , , , , LN2003, ,Algoritma pengukuran adalah yang paling sederhana: motor stepper mulai membawa tombol lebih dekat ke pelek, segera setelah tombol ditekan, langkah dikembalikan ke posisi awal, jumlah langkah ditransfer ke komputer, tindakan ini diulang untuk setiap berbicara. Akurasinya ternyata cukup memadai - 10 atau lebih langkah per 1 mm, yaitu, pada prinsipnya, Anda dapat menyesuaikan roda dengan akurasi 0,1 mm. Sebuah program sederhana mengubah data yang dikirim oleh arduino menjadi jadwal yang dapat dipahami, di mana Anda dapat melihat jari-jari yang harus diputar untuk memperbaiki masalah.Setelah sepenuhnya menyesuaikan roda saya, gambar membaik secara nyata:
: ( , ), , , , , LN2003, ,Algoritma pengukuran adalah yang paling sederhana: motor stepper mulai membawa tombol lebih dekat ke pelek, segera setelah tombol ditekan, langkah dikembalikan ke posisi awal, jumlah langkah ditransfer ke komputer, tindakan ini diulang untuk setiap berbicara. Akurasinya ternyata cukup memadai - 10 atau lebih langkah per 1 mm, yaitu, pada prinsipnya, Anda dapat menyesuaikan roda dengan akurasi 0,1 mm. Sebuah program sederhana mengubah data yang dikirim oleh arduino menjadi jadwal yang dapat dipahami, di mana Anda dapat melihat jari-jari yang harus diputar untuk memperbaiki masalah.Setelah sepenuhnya menyesuaikan roda saya, gambar membaik secara nyata: Masalahnya hilang - roda berhenti berdetak saat mengemudi. Tapi itu tidak mungkin untuk benar-benar memperbaiki lubang, ada penyok yang signifikan pada pelek setelah kecelakaan, itu terlihat pada grafik di atas:
Masalahnya hilang - roda berhenti berdetak saat mengemudi. Tapi itu tidak mungkin untuk benar-benar memperbaiki lubang, ada penyok yang signifikan pada pelek setelah kecelakaan, itu terlihat pada grafik di atas: Penyimpangan aktual dari pelek pada titik indentasi kurang dari satu milimeter. SumberKlienSumber Arduino
Penyimpangan aktual dari pelek pada titik indentasi kurang dari satu milimeter. SumberKlienSumber Arduino Source: https://habr.com/ru/post/id384385/
All Articles