 Tahun ini, kami berpartisipasi dalam kejuaraan peluncuran penyelidikan cuaca CanSat dan menetapkan tujuan yang ambisius: untuk mengubah probe menjadi UAV penuh, tetap mengikuti aturan kompetisi
Tahun ini, kami berpartisipasi dalam kejuaraan peluncuran penyelidikan cuaca CanSat dan menetapkan tujuan yang ambisius: untuk mengubah probe menjadi UAV penuh, tetap mengikuti aturan kompetisiPosting ini termasuk:
1) deskripsi perangkat2) tujuan penciptaannya3) proses perakitan4) tes penerbangan5) peluncuran akhirDeskripsi
Perangkat ini adalah quadrocopter dengan dua mode: secara pasif, itu mengambil bentuk silinder, yang ditempatkan di tubuh roket, di sinar aktif dibuka, mesin dimulai, misi utama dimulai, yang terdiri dalam mengumpulkan data tentang keadaan permukaan dan atmosfer bumi, penerbangan otonom menurut mengatur poin (dengan kemampuan untuk mencegat kontrol pilot) dan kembali ke pangkalan.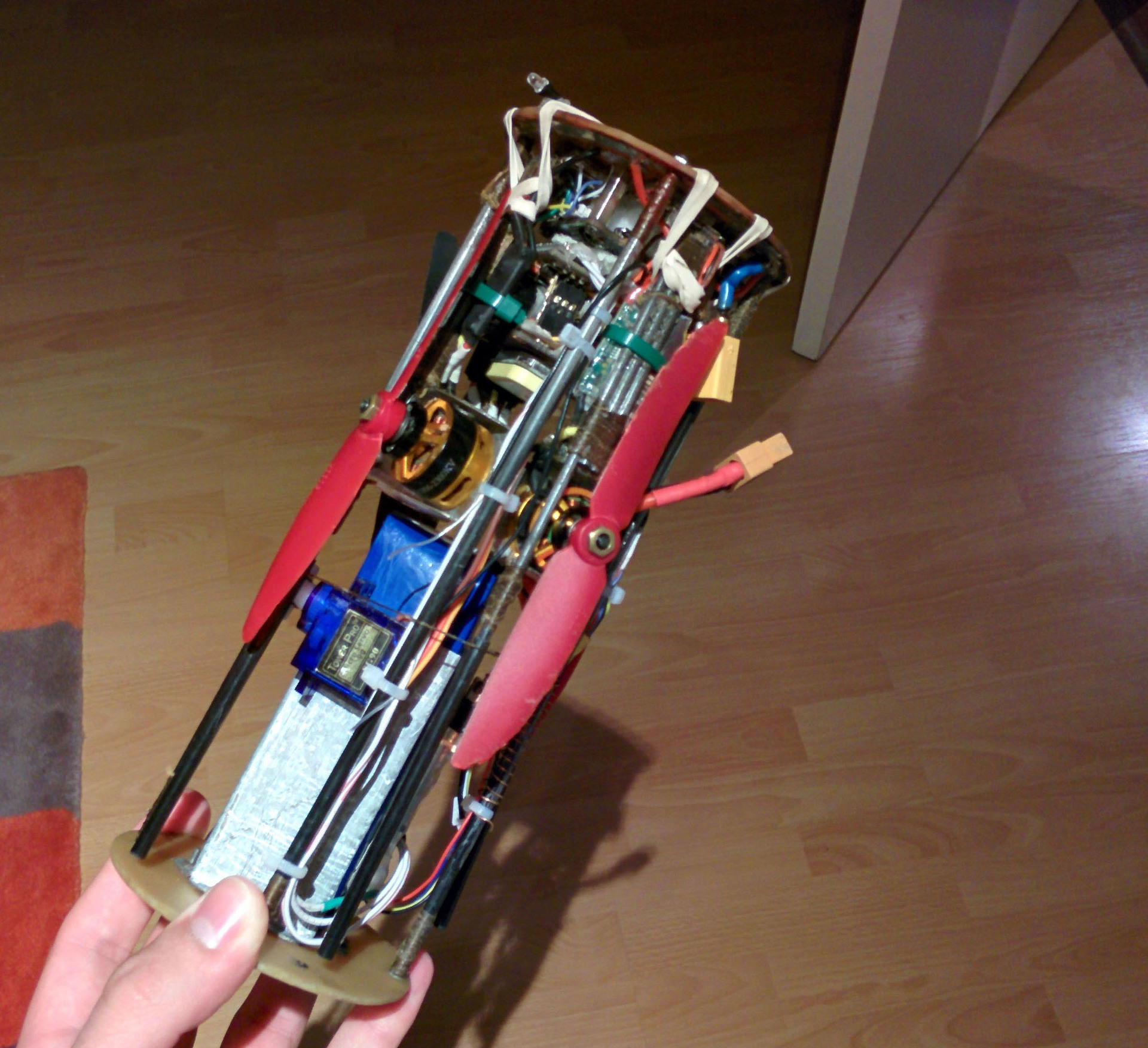 Status terlipat
Status terlipatKarakteristik:
Waktu penerbangan: 6-12 menitKisaran penerbangan horizontal: 4 kmKisaran penerbangan vertikal: 2 kmWaktu transisi mode aktif: 3 detikBerat: 600 gSensor yang dipasang: barometer, akselerometer, giroskop, magnetometer, GPS, kamera inframerahProyek ini dibuat untuk berpartisipasi dalam liga utama kejuaraan CanSat, yang diselenggarakan oleh SINP MSU.Apa itu Kansat, . («»), , .
— , 1-4 , , . .
, , . , , . .
3 :
— 0.5 , 350 , , , , ATmega 128, RXQ2 (433 ). 500.
— , . : 200, . 1 .
— (30 ) .
Tim saya memiliki pengalaman berpartisipasi dalam kejuaraan: tahun lalu kami berada di liga reguler. Alih-alih desainer yang sudah jadi, diputuskan untuk membuat sendiri, sambil menjaga komponen utama dari set dasar, sehingga aturan tidak benar-benar dilanggar, tetapi kami memberi tahu penyelenggara. Kami berhasil mengurangi ukuran papan sebanyak 3 kali karena penggunaan pencetakan dua sisi, jadi secara teoritis kami akan dapat mengambil bagian dalam kejuaraan Amerika, tetapi karena produksi di rumah papan bekerja dengan beberapa gangguan, yang tidak memungkinkan kami untuk meluncurkan roket.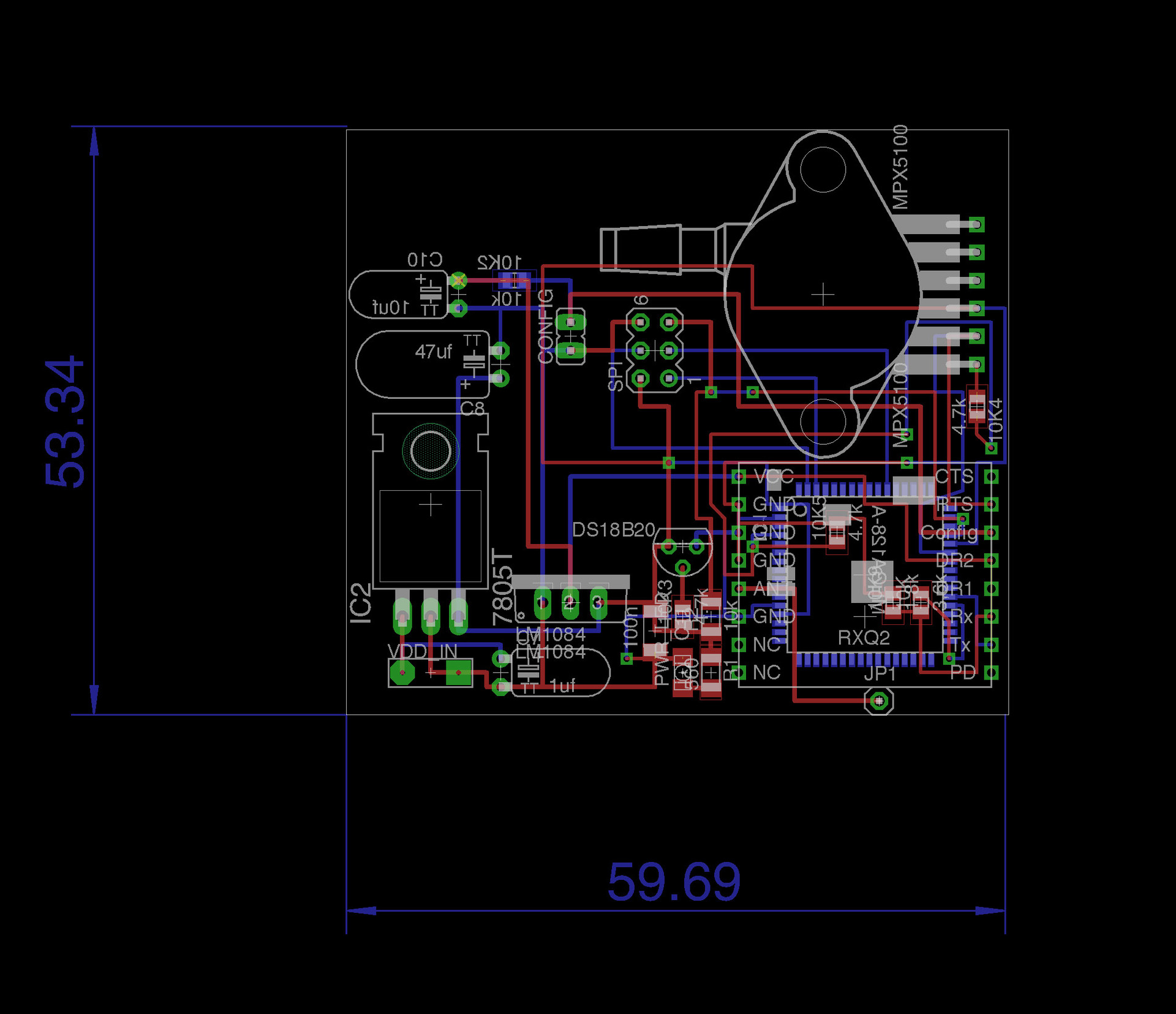 Papan sirkuit utamaMisi tambahan kami adalah untuk menembak bumi dalam jangkauan inframerah dengan kamera 16x4 piksel dan jangkauan yang terlihat dengan overlay lebih lanjut. Seperti yang diperlihatkan oleh praktik, proyek itu tidak berguna dalam satu atau lain cara, karena probe terus-menerus bergoyang karena parasut menurun, ada kekurangan kecepatan rana dan kecepatan pengambilan gambar, sehingga semua video buram.
Papan sirkuit utamaMisi tambahan kami adalah untuk menembak bumi dalam jangkauan inframerah dengan kamera 16x4 piksel dan jangkauan yang terlihat dengan overlay lebih lanjut. Seperti yang diperlihatkan oleh praktik, proyek itu tidak berguna dalam satu atau lain cara, karena probe terus-menerus bergoyang karena parasut menurun, ada kekurangan kecepatan rana dan kecepatan pengambilan gambar, sehingga semua video buram.contoh video semacam itu
( 0:35)
. 2-
Lebih detail tentang bagaimana kita semua bangkrut1) - , .
2) , - , . , .
3) 18 / .
4) , , .
, 4 , .
Penting juga menyebutkan tim yang lebih tua, yang ikut serta dalam kejuaraan yang lebih awal. Tahun lalu mereka berpartisipasi di liga utama. Fitur utama adalah penggunaan impeller bukan parasut, tetapi karena tidak tersedianya kode program dan papan darurat, mereka juga tidak bisa melakukan.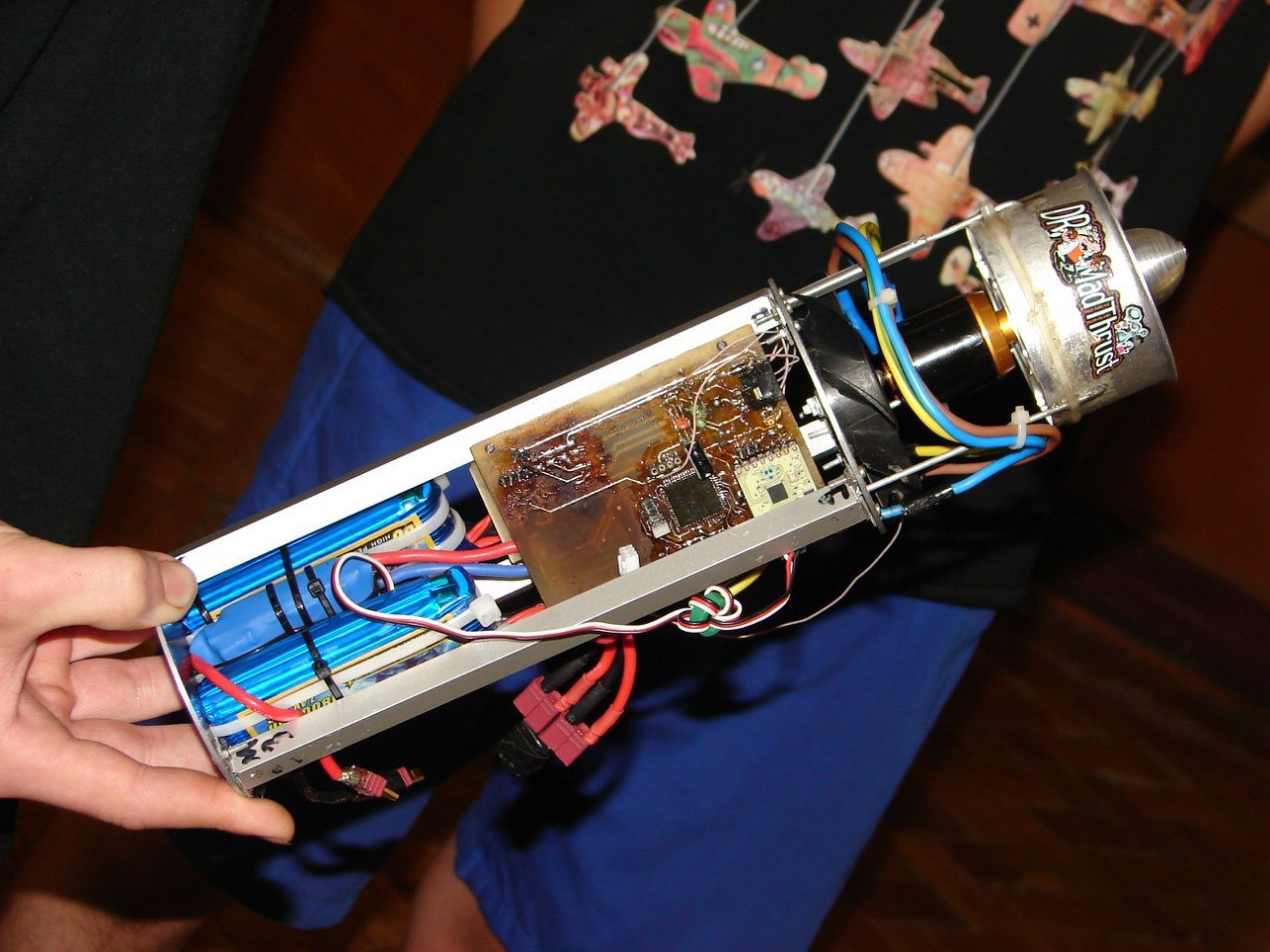 probe impeller
probe impellerKisah mereka
, , . , GPS GSM .
. , .
, , .
Tahun ini diputuskan untuk menggabungkan tim. Pada akhirnya, tim saya memutuskan untuk mengembangkan gagasan tentang keturunan yang terkontrol, yaitu membuat quadrocopter yang cocok dengan roket.Proses penciptaan
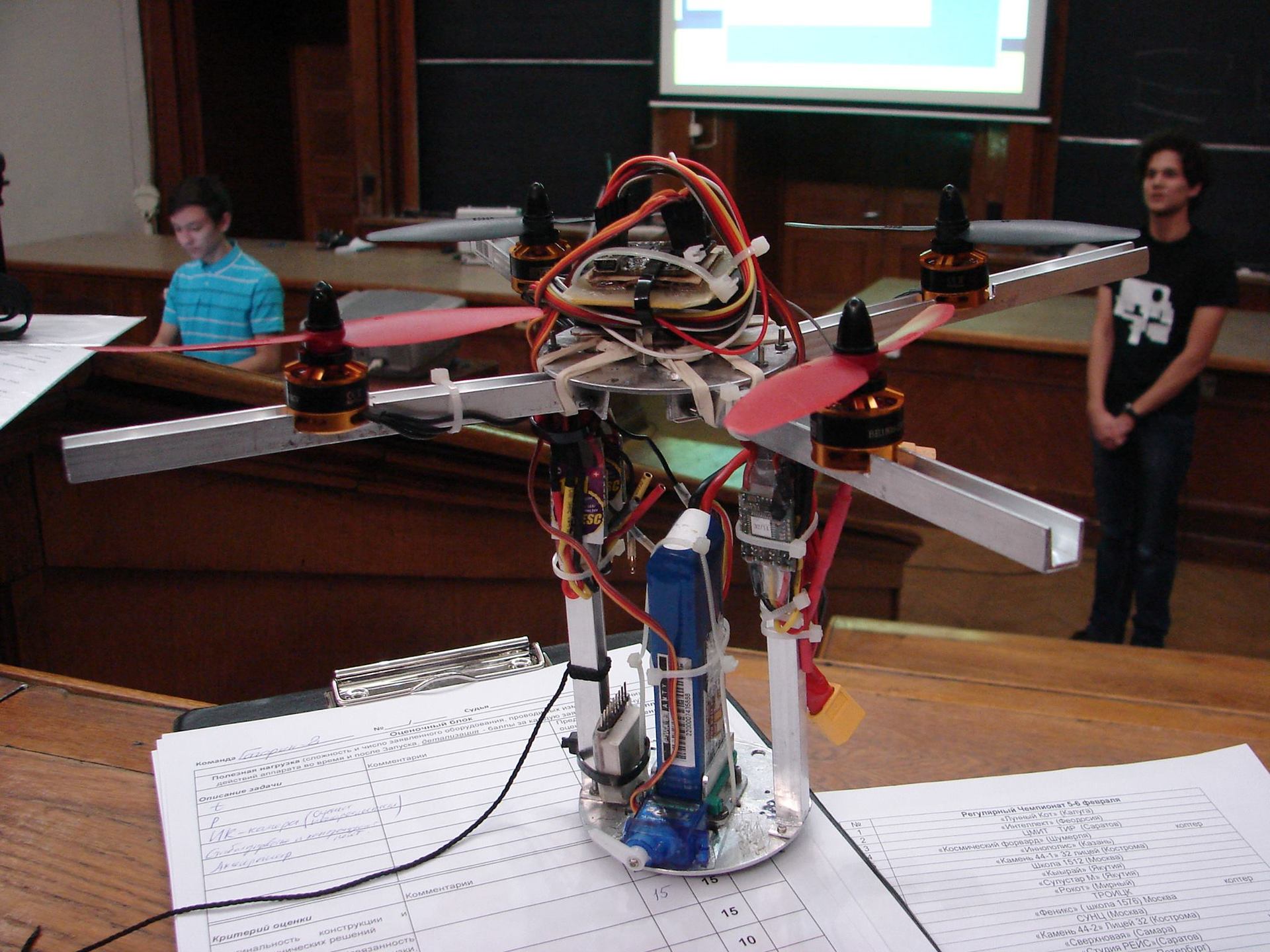 prototipe Prototipepertama yang kami buat seminggu sebelum sesi musim dingin untuk meyakinkan juri akan kenyataan proyek ini. Bingkai itu terbuat dari aluminium, balok juga. Sebagai pengendali penerbangan, saya menggunakan MultiWii, jadi prototipe ini hanya bisa membuka sinar atas perintah operator, dan terbang dalam mode manual.
prototipe Prototipepertama yang kami buat seminggu sebelum sesi musim dingin untuk meyakinkan juri akan kenyataan proyek ini. Bingkai itu terbuat dari aluminium, balok juga. Sebagai pengendali penerbangan, saya menggunakan MultiWii, jadi prototipe ini hanya bisa membuka sinar atas perintah operator, dan terbang dalam mode manual.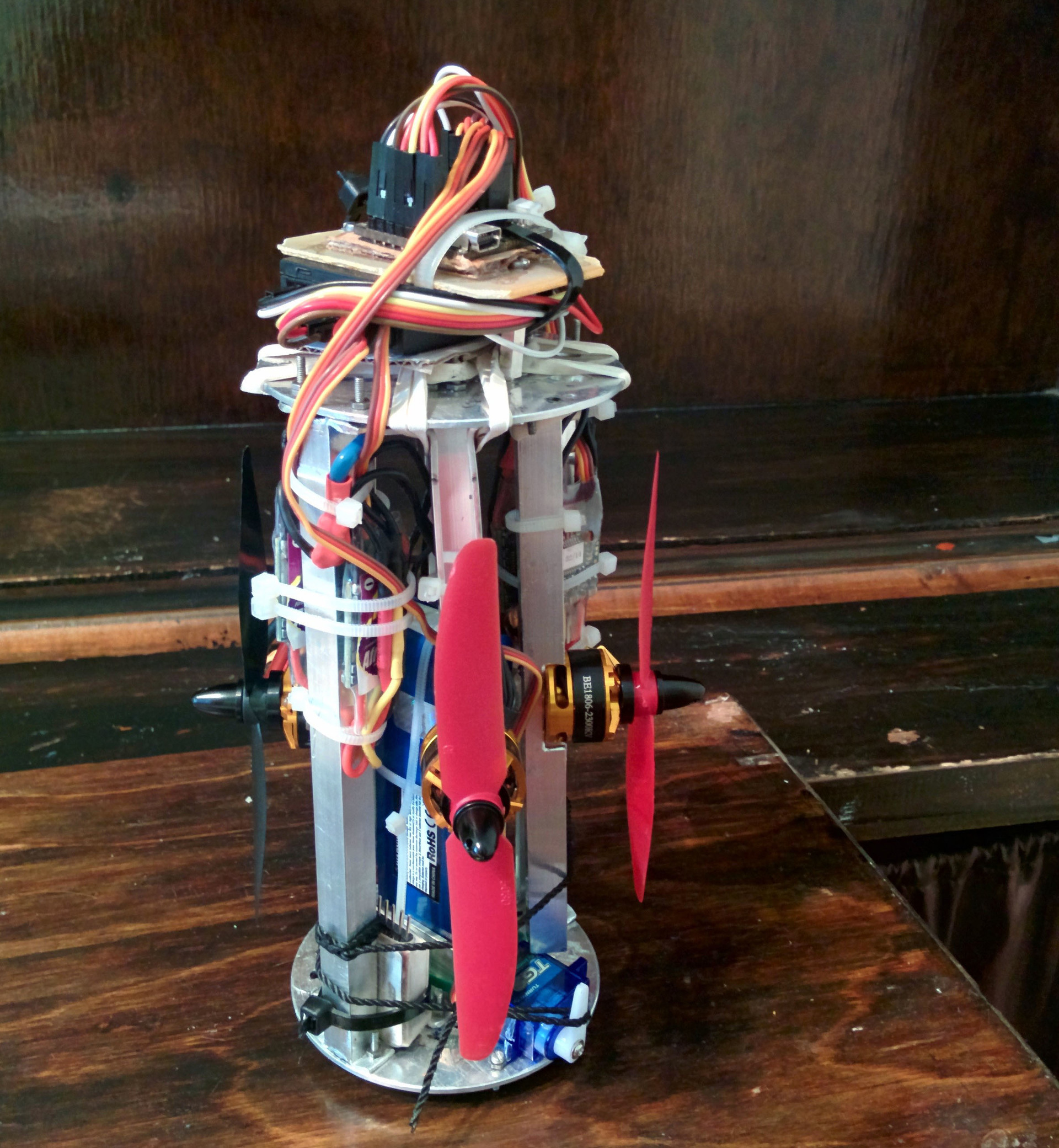 Juri menghargai proyek itu, kami menempati posisi pertama, dan sekarang kami bisa mulai berkumpul. Ngomong-ngomong, tepat sebelum presentasi selama penerbangan uji, mesin kami terbakar, kami mengubahnya menjadi cadangan. Selama presentasi, mesin terbakar lagi. Keduanya terhubung ke pengontrol kecepatan yang sama, kami tidak menggunakannya lagi.Sayangnya, sumber pembiayaan menghilang, sepertinya lebih dekat dengan lulus ujian, di sini saya tidak bisa ikut. Akibatnya, setelah lulus ujian, kami segera memesan bagian-bagian yang diperlukan dengan pengiriman kilat dan, dipersenjatai dengan pipa karbon, benang Kevlar dan epoksi, kami mulai menyusun kerangka dan balok. Selama dua minggu, gagasan bahwa kami tidak punya waktu tidak meninggalkan saya, tetapi tiket kereta dibeli, tidak ada jalan untuk kembali.
Juri menghargai proyek itu, kami menempati posisi pertama, dan sekarang kami bisa mulai berkumpul. Ngomong-ngomong, tepat sebelum presentasi selama penerbangan uji, mesin kami terbakar, kami mengubahnya menjadi cadangan. Selama presentasi, mesin terbakar lagi. Keduanya terhubung ke pengontrol kecepatan yang sama, kami tidak menggunakannya lagi.Sayangnya, sumber pembiayaan menghilang, sepertinya lebih dekat dengan lulus ujian, di sini saya tidak bisa ikut. Akibatnya, setelah lulus ujian, kami segera memesan bagian-bagian yang diperlukan dengan pengiriman kilat dan, dipersenjatai dengan pipa karbon, benang Kevlar dan epoksi, kami mulai menyusun kerangka dan balok. Selama dua minggu, gagasan bahwa kami tidak punya waktu tidak meninggalkan saya, tetapi tiket kereta dibeli, tidak ada jalan untuk kembali.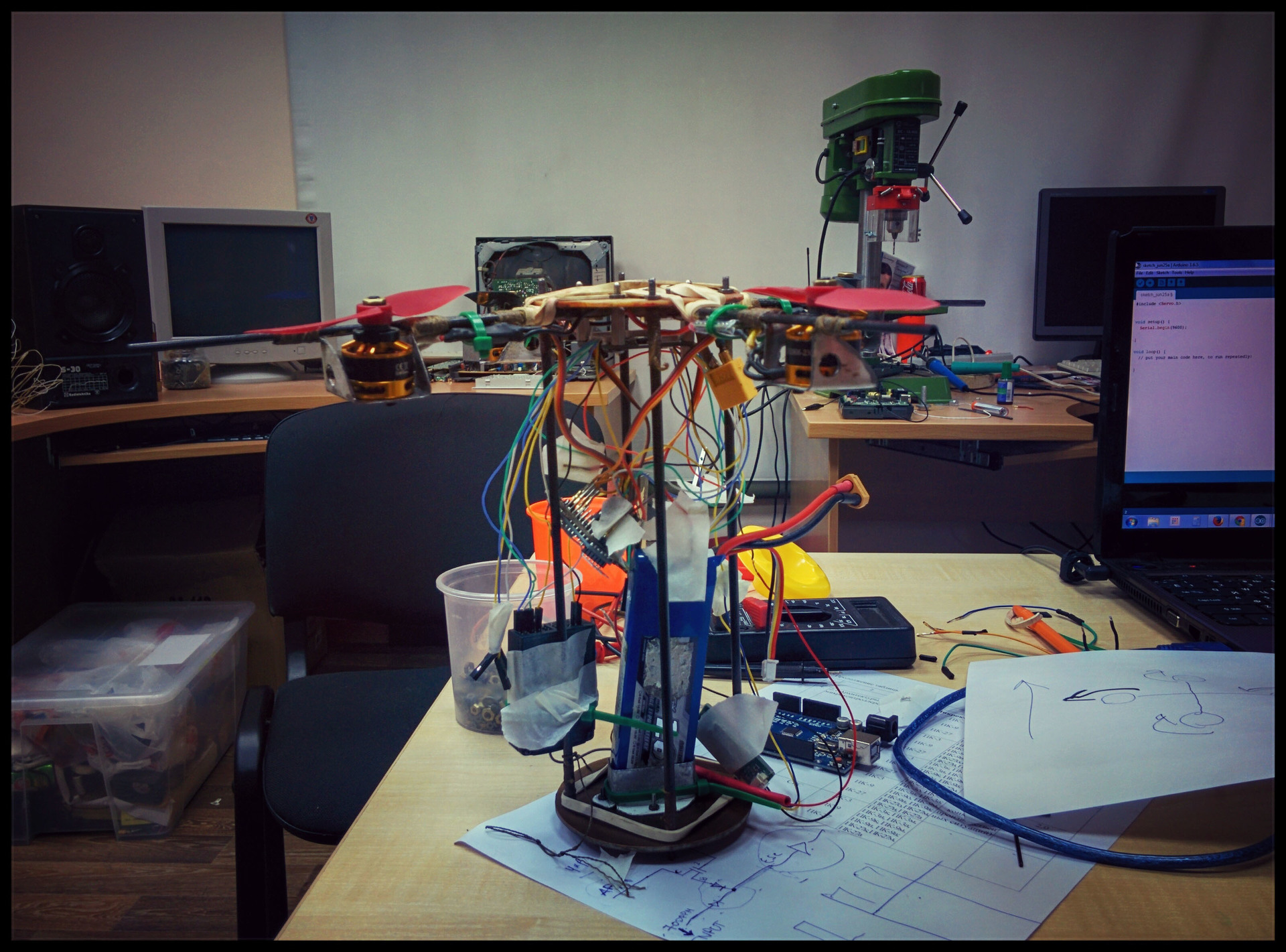 debug versi terakhirKami tidak harus berbicara tentang uji terbang yang serius, kami hanya memiliki satu model yang berfungsi, kerugiannya berarti kegagalan.Peluncuran pertama ada di dalam gedung, itu berhasil, peluncuran kedua di jalan dalam mode manual berhasil, peluncuran ketiga dalam mode tahan gps hampir fatal. Karena magnetometer yang disetel secara tidak benar, probe berhenti mematuhi perintah dan terbang menuju danau terdekat, karena dinding asrama menghentikannya. Kami kehilangan 2 balok dan 2 baling-baling, bingkainya bertahan. Kami memiliki balok cadangan, jadi kinerja dipulihkan dalam beberapa jam. Setelah pengaturan panjang magnetometer, ada upaya lain - peluncuran berhasil.Tetap memeriksa kembali ke pangkalan. Hari ini tepat pada saat wisuda saya, tetapi tidak ada yang bisa dilakukan, kami pergi ke ladang, mencoba untuk pulang - dengan sukses. Tidak ada batasan untuk kegembiraan, hari berikutnya kami pergi ke Moskow untuk peluncuran, tetapi kode untuk pengungkapan otomatis masih belum ditulis, dan sepertinya kami mengulangi kesalahan tahun lalu.tes kembali ke pangkalansaya akan memberi tahu Anda lebih banyak tentang sistem pengungkapan otomatis.Ini terdiri dari penggerak servo, tali, karet gelang, papan kontrol dan fotodetektor.
debug versi terakhirKami tidak harus berbicara tentang uji terbang yang serius, kami hanya memiliki satu model yang berfungsi, kerugiannya berarti kegagalan.Peluncuran pertama ada di dalam gedung, itu berhasil, peluncuran kedua di jalan dalam mode manual berhasil, peluncuran ketiga dalam mode tahan gps hampir fatal. Karena magnetometer yang disetel secara tidak benar, probe berhenti mematuhi perintah dan terbang menuju danau terdekat, karena dinding asrama menghentikannya. Kami kehilangan 2 balok dan 2 baling-baling, bingkainya bertahan. Kami memiliki balok cadangan, jadi kinerja dipulihkan dalam beberapa jam. Setelah pengaturan panjang magnetometer, ada upaya lain - peluncuran berhasil.Tetap memeriksa kembali ke pangkalan. Hari ini tepat pada saat wisuda saya, tetapi tidak ada yang bisa dilakukan, kami pergi ke ladang, mencoba untuk pulang - dengan sukses. Tidak ada batasan untuk kegembiraan, hari berikutnya kami pergi ke Moskow untuk peluncuran, tetapi kode untuk pengungkapan otomatis masih belum ditulis, dan sepertinya kami mengulangi kesalahan tahun lalu.tes kembali ke pangkalansaya akan memberi tahu Anda lebih banyak tentang sistem pengungkapan otomatis.Ini terdiri dari penggerak servo, tali, karet gelang, papan kontrol dan fotodetektor. Probe terbenam dalam roket, gelap di sana, dengan bantuan fotodetektor MK yang diperbaiki, sistem beralih ke mode siaga. Roket mulai, pemisahan, fluks cahaya meningkat, servo melepaskan tali yang menjaga sinar (keadaan normal karena karet gelang terbuka), sinar terbuka, setelah 3 detik papan memberikan akses ke mikrokontroler penerbangan on-board ke pengendali kecepatan, penerbangan ke titik pertama dimulai, Penerbangan pulang lebih lanjut.Papan manajemen pengungkapan juga mengontrol kamera IR. Setelah kami mentransfer pemrosesan data mentah dari sensor ke komputer, frekuensinya meningkat dari 18 fps menjadi 30 fps (data direkam pada microSD). Kami harus bekerja keras untuk mengontrol mesin: Anda tidak dapat memutuskan koneksi antara MK dan pengendali kecepatan terlebih dahulu, dan kemudian mengembalikan - mereka tidak akan memulai. Pertama, Anda perlu memberikan sinyal untuk menginisialisasi dan hanya kemudian memberikan akses ke penerbangan MK. Karena itu, saya harus membuat skema dengan kemampuan untuk mengakses regulator dari mikron penerbangan dan manajer.Kami dengan lancar melanjutkan ke tahap akhir -
Probe terbenam dalam roket, gelap di sana, dengan bantuan fotodetektor MK yang diperbaiki, sistem beralih ke mode siaga. Roket mulai, pemisahan, fluks cahaya meningkat, servo melepaskan tali yang menjaga sinar (keadaan normal karena karet gelang terbuka), sinar terbuka, setelah 3 detik papan memberikan akses ke mikrokontroler penerbangan on-board ke pengendali kecepatan, penerbangan ke titik pertama dimulai, Penerbangan pulang lebih lanjut.Papan manajemen pengungkapan juga mengontrol kamera IR. Setelah kami mentransfer pemrosesan data mentah dari sensor ke komputer, frekuensinya meningkat dari 18 fps menjadi 30 fps (data direkam pada microSD). Kami harus bekerja keras untuk mengontrol mesin: Anda tidak dapat memutuskan koneksi antara MK dan pengendali kecepatan terlebih dahulu, dan kemudian mengembalikan - mereka tidak akan memulai. Pertama, Anda perlu memberikan sinyal untuk menginisialisasi dan hanya kemudian memberikan akses ke penerbangan MK. Karena itu, saya harus membuat skema dengan kemampuan untuk mengakses regulator dari mikron penerbangan dan manajer.Kami dengan lancar melanjutkan ke tahap akhir -meluncurkan
Dan sepertinya malam sebelum peluncuran, semuanya sudah siap, kami bahkan menguji penerbangan dengan poin, benar-benar terbang, tetapi tidak ada yang berpikir untuk membuat simulasi lengkap. Akibatnya, bus yang mengantar kami ke bidang peluncuran mengungkapkan bahwa kode tidak berfungsi dengan benar; Saya mengundang seorang teman untuk mengomentari siklus utama di mana pekerjaan semua sistem tambahan mulai menentukan akar masalah. Kami mencoba untuk memperbaiki kesalahan selama sisa waktu sebelum peluncuran, meminta penyelenggara untuk membiarkan kami bertahan. Pada akhirnya, masalah telah terpecahkan, tetapi, ternyata, teman saya bukannya mengomentari siklus yang mengatur pengembalian "debug", yang tidak ingin dihapus oleh siapa pun.Roket, seperti yang terjadi, tidak dapat menaikkan probe dengan kilometer yang dinyatakan, hanya 500 meter pada hari berikutnya, jadi kami memutuskan untuk meluncurkan di hexacopter. Untuk mensimulasikan lokasi probe dalam sebuah roket, kami meletakkan penutup pada photodetector, dan ujung lainnya diikat ke hexacopter.Dan hexacopter naik dengan probe bergoyang kami, perlahan berubah menjadi tempat yang tidak bisa dibedakan; Probe dirilis oleh FPV per kilometer, tetapi karena resolusi rendah tidak jelas apakah pengungkapan itu terjadi, seseorang bahkan mengatakan bahwa itu tidak terbuka dan jatuh dengan batu (awalnya harus terbang pada titik yang diberikan, dan kemudian kembali ke mulai tempat, tetapi bahkan setelah 5 menit menunggu tidak ada yang melihatnya). Tentu saja, kami kesal dan pergi untuk mencari jenazahnya di lapangan, tetapi, melihat data telemetri terbaru, kami memperhatikan bahwa, meskipun koneksi dengan probe hilang, koordinat terakhir menunjukkan bidang tetangga dari parsnip sapi. Mari kita pergi bersama koordinat; di sepanjang jalan, tim lain mengatakan bahwa dia melihatnya duduk di semak-semak; pencarian dimulai. Ternyata, sangat sulit untuk menemukan probe kecil di rumput bahkan mengetahui koordinatnya.Pada akhirnya, saya memutuskan untuk menghidupkan mesin untuk menanam baterai yang seharusnya kosong, kemudian saya harus membersihkan voltmeter bawaan. Rencananya berhasil, kami merasa aman dan sehat, bahkan baling-baling tidak menderita, berkat sinar yang memanjang. Yang senang pulang untuk memproses data, atau lebih tepatnya, ketidakhadiran mereka, berkat kembalinya "debug".Benar, kami memiliki data dari pengontrol penerbangan, dan menganalisisnya. Punya lintasan, grafik ketinggian dan kesalahan sistem.
Yang senang pulang untuk memproses data, atau lebih tepatnya, ketidakhadiran mereka, berkat kembalinya "debug".Benar, kami memiliki data dari pengontrol penerbangan, dan menganalisisnya. Punya lintasan, grafik ketinggian dan kesalahan sistem.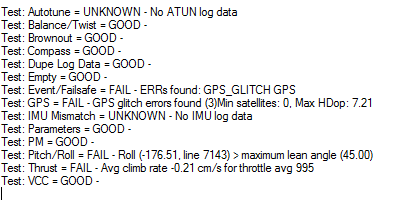
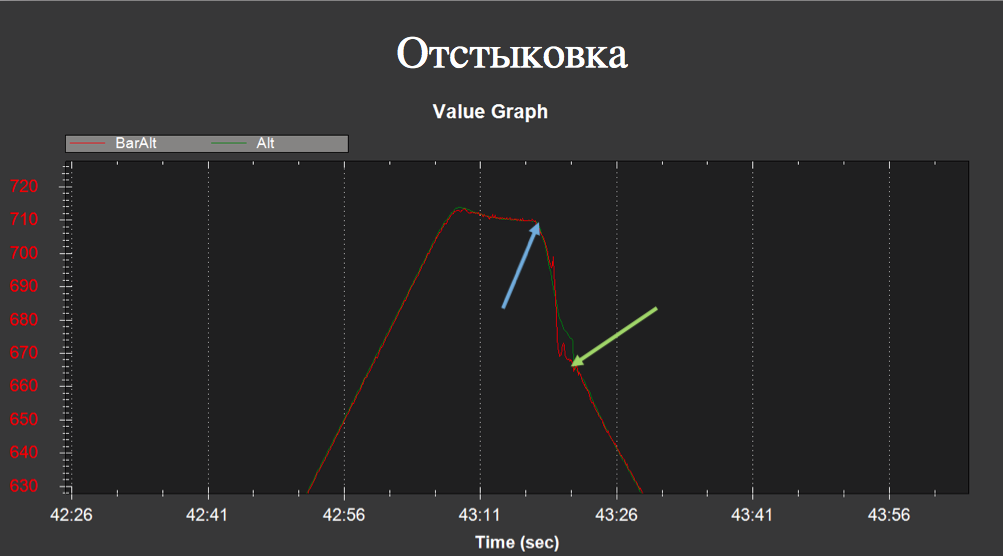 panah biru - saat menyalakan mesin; panah hijau - saat dimasukkannya mode kembali ke rumah.Kami juga menerima catatan dari hexacopter.Hasilnya adalah ia berhasil berpisah, melepaskan sinar, menyalakan mesin, mampu naik level dari posisi terbalik dan terbang ke titik terdekat.
panah biru - saat menyalakan mesin; panah hijau - saat dimasukkannya mode kembali ke rumah.Kami juga menerima catatan dari hexacopter.Hasilnya adalah ia berhasil berpisah, melepaskan sinar, menyalakan mesin, mampu naik level dari posisi terbalik dan terbang ke titik terdekat.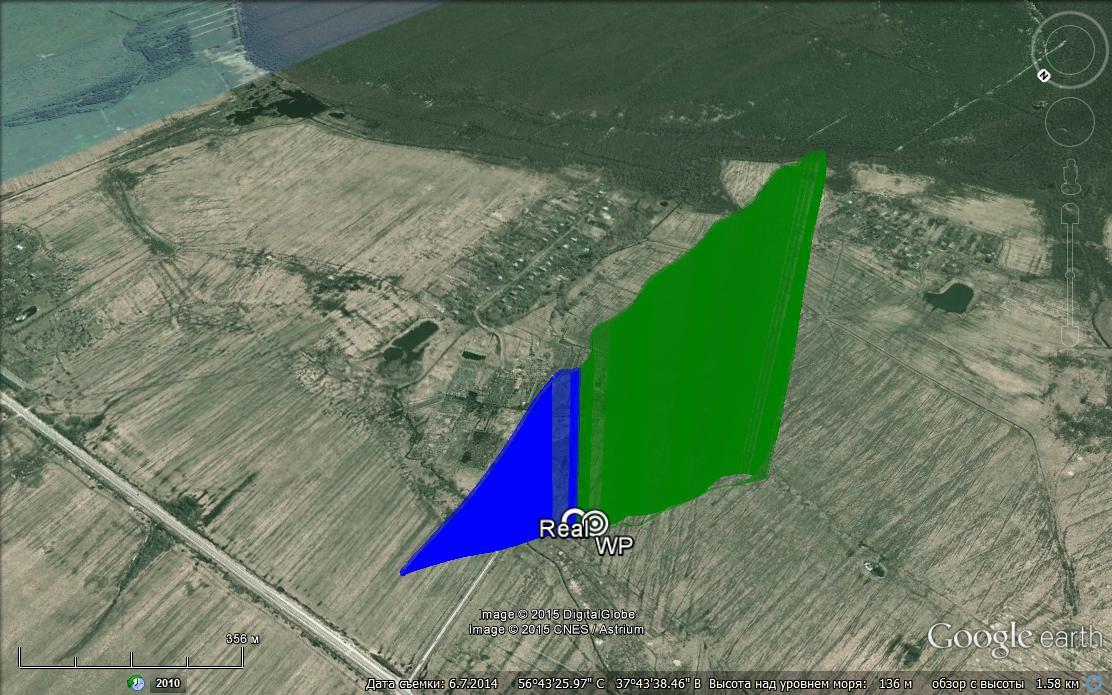 Kemudian ada kehilangan komunikasi dengan stasiun pangkalan, ini adalah saat yang tepat yang tidak saya perhitungkan. Dalam pengaturan standar, dia diperintahkan untuk mengganggu penerbangan dengan poin dan terbang pulang, jadi dia berhenti turun dan bersiap-siap untuk pangkalan, tapi itu dia, kami menyalakan mesin terlalu cepat, sebelum kami punya waktu untuk "menghangatkan" GPS, jadi dia ingat tidak cukup koordinat itu. , Saya tidak benar mencatat titik rumah (meskipun mengapa itu terletak pada garis lurus di sepanjang jalannya adalah pertanyaan). Kemudian dia mendarat dengan mulus dalam mode otomatis dan mematikan mesin.
Kemudian ada kehilangan komunikasi dengan stasiun pangkalan, ini adalah saat yang tepat yang tidak saya perhitungkan. Dalam pengaturan standar, dia diperintahkan untuk mengganggu penerbangan dengan poin dan terbang pulang, jadi dia berhenti turun dan bersiap-siap untuk pangkalan, tapi itu dia, kami menyalakan mesin terlalu cepat, sebelum kami punya waktu untuk "menghangatkan" GPS, jadi dia ingat tidak cukup koordinat itu. , Saya tidak benar mencatat titik rumah (meskipun mengapa itu terletak pada garis lurus di sepanjang jalannya adalah pertanyaan). Kemudian dia mendarat dengan mulus dalam mode otomatis dan mematikan mesin.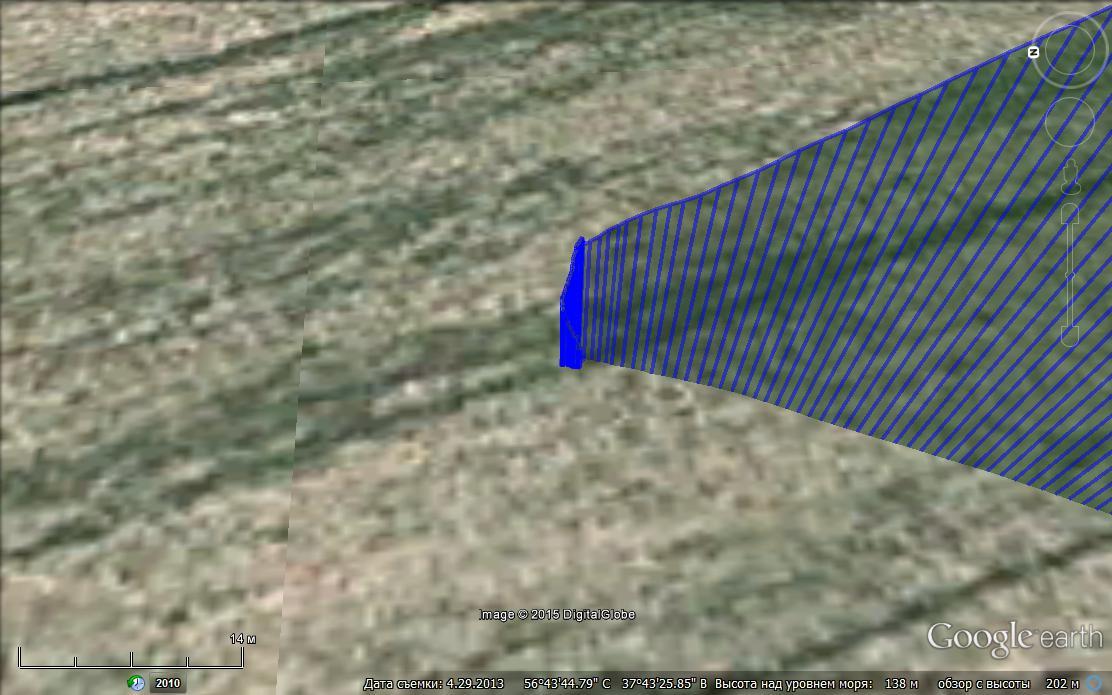 Setelah banyak kesalahan, kami tidak berharap untuk menempati posisi pertama, tetapi juri tampaknya menghargai gagasan itu. Jadi kami memenangkan kejuaraan CanSat keempat di Rusia.
Setelah banyak kesalahan, kami tidak berharap untuk menempati posisi pertama, tetapi juri tampaknya menghargai gagasan itu. Jadi kami memenangkan kejuaraan CanSat keempat di Rusia.PS
Saya tidak pernah menemukan satu pun proyek yang berfungsi pada keturunan yang dikendalikan dari penyelidikan CanSat, mungkin kita yang pertama, ini bahkan aneh, karena semuanya relatif sederhana.Referensi:
Di sini Anda dapat membaca tentang kansat tahun lalu.Situs web resmi, jika Anda ingin berpartisipasi,Situs firmware yang kami gunakan untuk penerbangan offlineKata penutup?
- , , . , .
?
, , , .
?
300$ 500$, . , , , . , .
GPS ?
( ).