V-REP adalah platform yang fleksibel dan scalable untuk robomodeling. Kelanjutan artikel
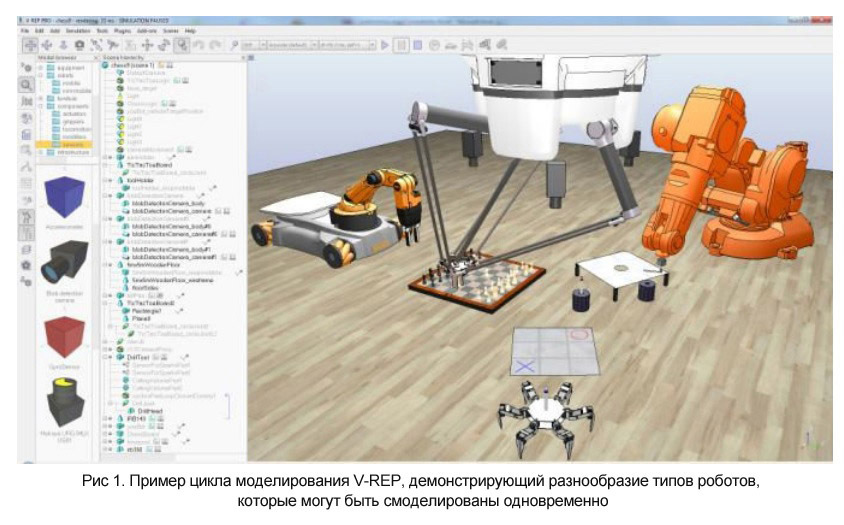 Saya mempersembahkan kepada Anda terjemahan dari bagian kedua artikel, bagian pertama yang telah kami terbitkan, dapat ditemukan di sini .Pada bagian pertama, kami berkenalan dengan lingkungan pemodelan V-REP, memeriksa metode kontrol pemodelan, dan kemungkinan menerapkan V-REP dalam pemodelan.Sekarang kita akan mempelajari fungsi pemodelan dalam V-REP dan mempertimbangkan beberapa contoh menggunakan platform V-REP.Fungsi pemodelanV-REP V-REP dikembangkan berdasarkan arsitektur universal dan tidak memiliki modul utama atau pusat. Sebaliknya, V-REP terdiri dari kelompok fungsional yang relatif terpisah yang dapat dinyalakan atau dimatikan sesuai kebutuhan.Bayangkan skenario simulasi di mana robot industri harus mengambil kotak dan memindahkannya ke lokasi lain. V-REP menghitung dinamika menangkap dan memegang kotak, dan untuk bagian lain dari siklus, ketika efek dinamis diabaikan, melakukan pemodelan kinematik. Pendekatan ini memungkinkan Anda untuk menghitung pergerakan robot industri dengan cepat dan akurat, yang tidak akan berfungsi jika simulasi penuh menggunakan perpustakaan dinamis yang kompleks. Penggunaan simulasi hybrid seperti itu dibenarkan ketika robot dipasang dengan kaku dan tidak berada di bawah pengaruh lingkungan.Selain inklusi selektif adaptif dari berbagai fungsi, V-REP dapat menggunakannya bersama-sama, memaksa satu untuk berinteraksi dengan yang lain. Misalnya, ketika memodelkan robot humanoid, V-REP dapat memproses gerakan tungkai dengan cara berikut: pertama, kinematika terbalik untuk setiap tungkai dihitung (mis., Posisi total dari seluruh tungkai dihitung dari posisi dan orientasi kaki yang diinginkan); maka posisi sambungan dihitung sebagai target untuk modul dinamika. Ini memungkinkan Anda untuk mengatur gerakan humanoid dengan cara yang sangat universal, karena untuk setiap kaki gerakan pengulangan dari jalur 6 dimensi akan ditetapkan: perhitungan yang tersisa dilakukan secara otomatis.Fungsi mengacu pada objek skrip tertentu atau modul perhitungan tertentu, yang masing-masing dijelaskan di bawah ini.Objek Simulasi .Model simulasi V-REP berisi beberapa objek atau elemen yang dirangkai menjadi hierarki pohon. Adegan simulasi berikut didukung oleh V-REP:• Artikulasi : Elemen yang menghubungkan dua atau lebih objek adegan bersama-sama, memberikan kebebasan satu hingga tiga derajat (prismatik, rotasi, heliks, atau bola). Mereka dapat bekerja dalam berbagai mode (misalnya, dalam mode daya / rotasi, kinematika terbalik, dll.)• Bentuk : jerat poligonal segitiga yang digunakan untuk pemodelan dan visualisasi benda padat.• Sensor tanpa kontak (Gambar 3): Mereka menghitung jarak minimum yang tepat ke bagian gambar yang berada dalam rentang deteksi. Ini memberikan simulasi yang berkesinambungan dan lebih realistis daripada deteksi berdasarkan sejumlah besar sinar directional.• Sensor visual: sensor visual memungkinkan Anda mengekstraksi gambar dan informasi kompleks dari adegan pemodelan (warna, ukuran objek, kedalaman peta, dll.). Fungsi pemfilteran dan pemrosesan gambar bawaan meluncurkan blok elemen pemfilteran. Sensor visual menggunakan akselerasi perangkat keras untuk mendapatkan gambar RAW (dukungan OpenGL).• Sensor gaya: mereka adalah penghubung keras antara angka-angka yang dapat merekam gaya dan torsi yang diterapkan, dan yang dapat rusak ketika ambang tertentu dilampaui.• Bagan : Bagan dapat merekam berbagai aliran data pengguna atau yang telah ditentukan sebelumnya. Aliran data kemudian dapat ditampilkan secara langsung (timeline dari tipe data yang diberikan), atau dalam kombinasi satu sama lain untuk menampilkan grafik X / Y, atau kurva 3D.• Kamera : memungkinkan Anda untuk memvisualisasikan adegan yang bergantung pada sudut pandang.• Pencahayaan : menerangi pemandangan atau objek individual dalam pemandangan, dan memengaruhi kamera atau sensor visual.• Cara: mereka menentukan gerakan kompleks di ruang angkasa (urutan terjemahan yang digabungkan secara bebas, rotasi dan / atau jeda), dan digunakan, misalnya, untuk mengarahkan obor las robot di sepanjang jalur yang diberikan, atau memungkinkan Anda menentukan gerakan sabuk konveyor.• Poin - poin materi : ini adalah sistem referensi tambahan yang dapat digunakan untuk berbagai tugas. Terutama digunakan dalam kombinasi dengan benda-benda lain di tempat kejadian.• Pabrik : dapat digunakan untuk meniru permukaan operasi pemotongan pada formulir (mis., Penggilingan, pemotongan laser, dll.)
Saya mempersembahkan kepada Anda terjemahan dari bagian kedua artikel, bagian pertama yang telah kami terbitkan, dapat ditemukan di sini .Pada bagian pertama, kami berkenalan dengan lingkungan pemodelan V-REP, memeriksa metode kontrol pemodelan, dan kemungkinan menerapkan V-REP dalam pemodelan.Sekarang kita akan mempelajari fungsi pemodelan dalam V-REP dan mempertimbangkan beberapa contoh menggunakan platform V-REP.Fungsi pemodelanV-REP V-REP dikembangkan berdasarkan arsitektur universal dan tidak memiliki modul utama atau pusat. Sebaliknya, V-REP terdiri dari kelompok fungsional yang relatif terpisah yang dapat dinyalakan atau dimatikan sesuai kebutuhan.Bayangkan skenario simulasi di mana robot industri harus mengambil kotak dan memindahkannya ke lokasi lain. V-REP menghitung dinamika menangkap dan memegang kotak, dan untuk bagian lain dari siklus, ketika efek dinamis diabaikan, melakukan pemodelan kinematik. Pendekatan ini memungkinkan Anda untuk menghitung pergerakan robot industri dengan cepat dan akurat, yang tidak akan berfungsi jika simulasi penuh menggunakan perpustakaan dinamis yang kompleks. Penggunaan simulasi hybrid seperti itu dibenarkan ketika robot dipasang dengan kaku dan tidak berada di bawah pengaruh lingkungan.Selain inklusi selektif adaptif dari berbagai fungsi, V-REP dapat menggunakannya bersama-sama, memaksa satu untuk berinteraksi dengan yang lain. Misalnya, ketika memodelkan robot humanoid, V-REP dapat memproses gerakan tungkai dengan cara berikut: pertama, kinematika terbalik untuk setiap tungkai dihitung (mis., Posisi total dari seluruh tungkai dihitung dari posisi dan orientasi kaki yang diinginkan); maka posisi sambungan dihitung sebagai target untuk modul dinamika. Ini memungkinkan Anda untuk mengatur gerakan humanoid dengan cara yang sangat universal, karena untuk setiap kaki gerakan pengulangan dari jalur 6 dimensi akan ditetapkan: perhitungan yang tersisa dilakukan secara otomatis.Fungsi mengacu pada objek skrip tertentu atau modul perhitungan tertentu, yang masing-masing dijelaskan di bawah ini.Objek Simulasi .Model simulasi V-REP berisi beberapa objek atau elemen yang dirangkai menjadi hierarki pohon. Adegan simulasi berikut didukung oleh V-REP:• Artikulasi : Elemen yang menghubungkan dua atau lebih objek adegan bersama-sama, memberikan kebebasan satu hingga tiga derajat (prismatik, rotasi, heliks, atau bola). Mereka dapat bekerja dalam berbagai mode (misalnya, dalam mode daya / rotasi, kinematika terbalik, dll.)• Bentuk : jerat poligonal segitiga yang digunakan untuk pemodelan dan visualisasi benda padat.• Sensor tanpa kontak (Gambar 3): Mereka menghitung jarak minimum yang tepat ke bagian gambar yang berada dalam rentang deteksi. Ini memberikan simulasi yang berkesinambungan dan lebih realistis daripada deteksi berdasarkan sejumlah besar sinar directional.• Sensor visual: sensor visual memungkinkan Anda mengekstraksi gambar dan informasi kompleks dari adegan pemodelan (warna, ukuran objek, kedalaman peta, dll.). Fungsi pemfilteran dan pemrosesan gambar bawaan meluncurkan blok elemen pemfilteran. Sensor visual menggunakan akselerasi perangkat keras untuk mendapatkan gambar RAW (dukungan OpenGL).• Sensor gaya: mereka adalah penghubung keras antara angka-angka yang dapat merekam gaya dan torsi yang diterapkan, dan yang dapat rusak ketika ambang tertentu dilampaui.• Bagan : Bagan dapat merekam berbagai aliran data pengguna atau yang telah ditentukan sebelumnya. Aliran data kemudian dapat ditampilkan secara langsung (timeline dari tipe data yang diberikan), atau dalam kombinasi satu sama lain untuk menampilkan grafik X / Y, atau kurva 3D.• Kamera : memungkinkan Anda untuk memvisualisasikan adegan yang bergantung pada sudut pandang.• Pencahayaan : menerangi pemandangan atau objek individual dalam pemandangan, dan memengaruhi kamera atau sensor visual.• Cara: mereka menentukan gerakan kompleks di ruang angkasa (urutan terjemahan yang digabungkan secara bebas, rotasi dan / atau jeda), dan digunakan, misalnya, untuk mengarahkan obor las robot di sepanjang jalur yang diberikan, atau memungkinkan Anda menentukan gerakan sabuk konveyor.• Poin - poin materi : ini adalah sistem referensi tambahan yang dapat digunakan untuk berbagai tugas. Terutama digunakan dalam kombinasi dengan benda-benda lain di tempat kejadian.• Pabrik : dapat digunakan untuk meniru permukaan operasi pemotongan pada formulir (mis., Penggilingan, pemotongan laser, dll.) Modul komputasiObjek simulasi jarang digunakan secara independen, mereka lebih suka bekerja pada atau dalam hubungannya dengan objek lain (misalnya, sensor proximity mendeteksi bentuk). Selain itu, V-REP menawarkan beberapa modul perhitungan yang dapat langsung bekerja pada satu atau lebih adegan simulasi. Berikut ini adalah modul perhitungan utama:• Modul kinematika : memungkinkan Anda untuk melakukan perhitungan kinematik (langsung dan terbalik) untuk semua jenis mekanisme (bercabang, ditutup, redundan, mengandung loop bersarang, dll.). Modul ini didasarkan pada perhitungan kuadrat terkecil.• Modul dinamis: memungkinkan Anda untuk menyesuaikan dinamika penghitungan padatan dan interaksi (tabrakan, kemelekatan, dll.) menggunakan Bullet Physics Library dan Open Dynamics Engine. Simulasi sistem dinamis masih pada tahap awal dan sering didasarkan pada perkiraan indikator. Untuk mengkonfirmasi hasil, penting untuk mengandalkan tidak hanya pada satu mesin fisik.• Modul pendeteksian tabrakan: memungkinkan Anda untuk dengan cepat memeriksa tabrakan antara berbagai bentuk atau kumpulan bentuk. Modul ini sepenuhnya independen dari respons algoritma untuk menghitung dinamika modul. Struktur data berdasarkan pohon biner dari kotak persegi panjang digunakan untuk akselerasi. Optimalisasi tambahan dicapai melalui teknik caching.•Modul perhitungan jarak (modul Mech-mech) : memungkinkan Anda untuk dengan cepat meminimalkan jarak perhitungan antara bentuk apa pun (cembung, cekung, terbuka, tertutup, dll.) Atau serangkaian bentuk. Modul ini menggunakan struktur data yang sama dengan modul deteksi tabrakan.• Modul perencanaan gerak : penjadwalan manual tugas-tugas holonomik dan non-ekonomi menggunakan pendekatan berdasarkan algoritma Rapid -menjelajahi Random Tree (RRT) . Tugas perencanaan jalur kinematik juga didukung.Untuk fleksibilitas, modul-modul di atas diimplementasikan dalam bentuk umum. Sasaran integrasi mereka dengan V-REP agak mirip dengan integrasi skrip bawaan, yang dijelaskan pada bagian pertama artikel. Sebagian besar simulasi atau model simulasi tidak memerlukan alat khusus, seperangkat alat dasar yang cukup baik. Jika alat terintegrasi ke dalam simulator, dan tugas mereka yang berhubungan langsung dengan model simulasi didefinisikan, maka model menjadi sangat mudah dibawa-bawa. Model simulasi diluncurkan pada mesin atau platform lain menggunakan satu file model: tidak perlu mengkompilasi ulang, menginstal atau me-restart plugin. Demikian pula, ini membuat model sangat skalabel: duplikasi model mempertahankan fungsionalitas tanpa perlu mengubah kode sumber.Proses duplikasi dapat dilakukan bahkan selama proses simulasi.Pendekatan tradisional untuk memperluas fungsionalitas dengan plugin untuk mendukung model simulasi spesifik juga didukung dalam V-REP.ContohDalam beberapa kasus, tidak mungkin untuk menggunakan pengontrol secara terpisah dari entitas yang disimulasikan. Sebagai aturan, ini terjadi ketika bekerja dengan pengontrol utama robot, yang mencakup elemen yang sangat kompleks. Atau ketika controller harus berjalan secara native. Tetapi di sisi lain, apakah benar-benar perlu untuk membuat plugin Anda sendiri untuk setiap sensor kecil, fitur tambahan baru atau fungsi kecil? Tiga contoh berikut menggambarkan fleksibilitas yang menarik dan mudah dibawa dari model simulasi yang ditawarkan dalam V-REP.1) model pemindai laserGambar 4 menunjukkan model pemindai laser dalam V-REP. Model ini terdiri dari selubung atau selubung, engsel, sensor jarak yang dipasang di engsel.Skrip anak interrupting terpasang pada badan sensor dan bertanggung jawab untuk memindahkan sambungan ke sudut tertentu, membaca sensor proximity, menghasilkan garis primitif dalam adegan pemodelan (dan titik kontak), kemudian pindah ke posisi sudut berikutnya. Karena skrip anak dieksekusi di utas utama, skrip ini memproses posisi sudut yang sama persis dengan sambungan saat persendian ini bergerak selama simulasi.Anda dapat menyeret model ke dalam adegan simulasi dan itu akan mulai berfungsi segera. Seluruh model ditempatkan dalam satu file, juga cocok untuk penggunaan langsung pada platform lain dan kompatibel dengan V-REP saat ini dan di masa depan. Model dapat diduplikasi sebanyak yang diperlukan, dan kode kontrolnya dapat diubah jika perlu.
Modul komputasiObjek simulasi jarang digunakan secara independen, mereka lebih suka bekerja pada atau dalam hubungannya dengan objek lain (misalnya, sensor proximity mendeteksi bentuk). Selain itu, V-REP menawarkan beberapa modul perhitungan yang dapat langsung bekerja pada satu atau lebih adegan simulasi. Berikut ini adalah modul perhitungan utama:• Modul kinematika : memungkinkan Anda untuk melakukan perhitungan kinematik (langsung dan terbalik) untuk semua jenis mekanisme (bercabang, ditutup, redundan, mengandung loop bersarang, dll.). Modul ini didasarkan pada perhitungan kuadrat terkecil.• Modul dinamis: memungkinkan Anda untuk menyesuaikan dinamika penghitungan padatan dan interaksi (tabrakan, kemelekatan, dll.) menggunakan Bullet Physics Library dan Open Dynamics Engine. Simulasi sistem dinamis masih pada tahap awal dan sering didasarkan pada perkiraan indikator. Untuk mengkonfirmasi hasil, penting untuk mengandalkan tidak hanya pada satu mesin fisik.• Modul pendeteksian tabrakan: memungkinkan Anda untuk dengan cepat memeriksa tabrakan antara berbagai bentuk atau kumpulan bentuk. Modul ini sepenuhnya independen dari respons algoritma untuk menghitung dinamika modul. Struktur data berdasarkan pohon biner dari kotak persegi panjang digunakan untuk akselerasi. Optimalisasi tambahan dicapai melalui teknik caching.•Modul perhitungan jarak (modul Mech-mech) : memungkinkan Anda untuk dengan cepat meminimalkan jarak perhitungan antara bentuk apa pun (cembung, cekung, terbuka, tertutup, dll.) Atau serangkaian bentuk. Modul ini menggunakan struktur data yang sama dengan modul deteksi tabrakan.• Modul perencanaan gerak : penjadwalan manual tugas-tugas holonomik dan non-ekonomi menggunakan pendekatan berdasarkan algoritma Rapid -menjelajahi Random Tree (RRT) . Tugas perencanaan jalur kinematik juga didukung.Untuk fleksibilitas, modul-modul di atas diimplementasikan dalam bentuk umum. Sasaran integrasi mereka dengan V-REP agak mirip dengan integrasi skrip bawaan, yang dijelaskan pada bagian pertama artikel. Sebagian besar simulasi atau model simulasi tidak memerlukan alat khusus, seperangkat alat dasar yang cukup baik. Jika alat terintegrasi ke dalam simulator, dan tugas mereka yang berhubungan langsung dengan model simulasi didefinisikan, maka model menjadi sangat mudah dibawa-bawa. Model simulasi diluncurkan pada mesin atau platform lain menggunakan satu file model: tidak perlu mengkompilasi ulang, menginstal atau me-restart plugin. Demikian pula, ini membuat model sangat skalabel: duplikasi model mempertahankan fungsionalitas tanpa perlu mengubah kode sumber.Proses duplikasi dapat dilakukan bahkan selama proses simulasi.Pendekatan tradisional untuk memperluas fungsionalitas dengan plugin untuk mendukung model simulasi spesifik juga didukung dalam V-REP.ContohDalam beberapa kasus, tidak mungkin untuk menggunakan pengontrol secara terpisah dari entitas yang disimulasikan. Sebagai aturan, ini terjadi ketika bekerja dengan pengontrol utama robot, yang mencakup elemen yang sangat kompleks. Atau ketika controller harus berjalan secara native. Tetapi di sisi lain, apakah benar-benar perlu untuk membuat plugin Anda sendiri untuk setiap sensor kecil, fitur tambahan baru atau fungsi kecil? Tiga contoh berikut menggambarkan fleksibilitas yang menarik dan mudah dibawa dari model simulasi yang ditawarkan dalam V-REP.1) model pemindai laserGambar 4 menunjukkan model pemindai laser dalam V-REP. Model ini terdiri dari selubung atau selubung, engsel, sensor jarak yang dipasang di engsel.Skrip anak interrupting terpasang pada badan sensor dan bertanggung jawab untuk memindahkan sambungan ke sudut tertentu, membaca sensor proximity, menghasilkan garis primitif dalam adegan pemodelan (dan titik kontak), kemudian pindah ke posisi sudut berikutnya. Karena skrip anak dieksekusi di utas utama, skrip ini memproses posisi sudut yang sama persis dengan sambungan saat persendian ini bergerak selama simulasi.Anda dapat menyeret model ke dalam adegan simulasi dan itu akan mulai berfungsi segera. Seluruh model ditempatkan dalam satu file, juga cocok untuk penggunaan langsung pada platform lain dan kompatibel dengan V-REP saat ini dan di masa depan. Model dapat diduplikasi sebanyak yang diperlukan, dan kode kontrolnya dapat diubah jika perlu.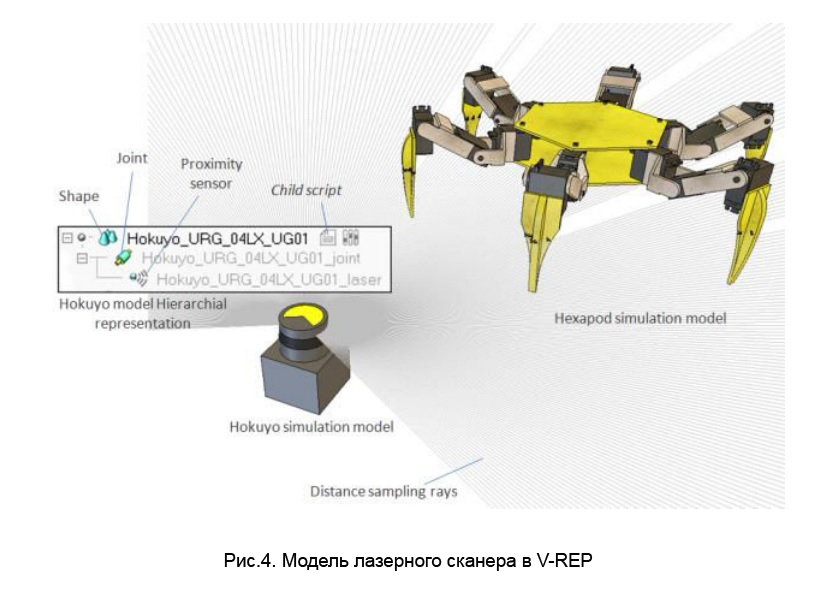 Model lain dapat dibuat dengan cara yang sama, apakah itu pena untuk lukisan, nozzle lukisan, pegangan, kamera pendeteksi noda, atau seluruh robot.2) Model simulasi manipulator paralelGambar 5 menunjukkan model manipulator paralel yang dikendalikan dalam mode kinematika langsung dari aplikasi eksternal yang terhubung melalui API jarak jauh. Untuk menangani dengan benar semua kendala, model ini bekerja melalui modul kinematika V-REP. Karena semua masalah kinematik yang terkait dengan ini terkait dengan suatu model, model ini mandiri, mudah diduplikasi, dan berjalan pada platform lain. Penskalaan fisik model, yang merupakan fitur lain yang didukung oleh V-REP, akan secara otomatis menyesuaikan semua tugas kinematik (antara lain), dan membuat kinematika internal konsisten tanpa perlu mengubah kode.
Model lain dapat dibuat dengan cara yang sama, apakah itu pena untuk lukisan, nozzle lukisan, pegangan, kamera pendeteksi noda, atau seluruh robot.2) Model simulasi manipulator paralelGambar 5 menunjukkan model manipulator paralel yang dikendalikan dalam mode kinematika langsung dari aplikasi eksternal yang terhubung melalui API jarak jauh. Untuk menangani dengan benar semua kendala, model ini bekerja melalui modul kinematika V-REP. Karena semua masalah kinematik yang terkait dengan ini terkait dengan suatu model, model ini mandiri, mudah diduplikasi, dan berjalan pada platform lain. Penskalaan fisik model, yang merupakan fitur lain yang didukung oleh V-REP, akan secara otomatis menyesuaikan semua tugas kinematik (antara lain), dan membuat kinematika internal konsisten tanpa perlu mengubah kode. 3) Model simulasi orang pintarGambar 6 menunjukkan model simulasi manusia yang melakukan tugas perencanaan lintasan antara posisi saat ini dan posisi akhir yang diinginkan. Sementara tugas perencanaan jalur itu sendiri dilakukan dalam modul perencanaan jalur V-REP, skrip anak yang dilampirkan ke model memanggil perhitungan tindakan lengan dan kaki, menempatkannya ke dalam tindakan dan memindahkan model dengan benar di sepanjang jalur yang dihitung. Dalam hal ini, modelnya juga sepenuhnya otonom dan sepenuhnya portabel.
3) Model simulasi orang pintarGambar 6 menunjukkan model simulasi manusia yang melakukan tugas perencanaan lintasan antara posisi saat ini dan posisi akhir yang diinginkan. Sementara tugas perencanaan jalur itu sendiri dilakukan dalam modul perencanaan jalur V-REP, skrip anak yang dilampirkan ke model memanggil perhitungan tindakan lengan dan kaki, menempatkannya ke dalam tindakan dan memindahkan model dengan benar di sepanjang jalur yang dihitung. Dalam hal ini, modelnya juga sepenuhnya otonom dan sepenuhnya portabel.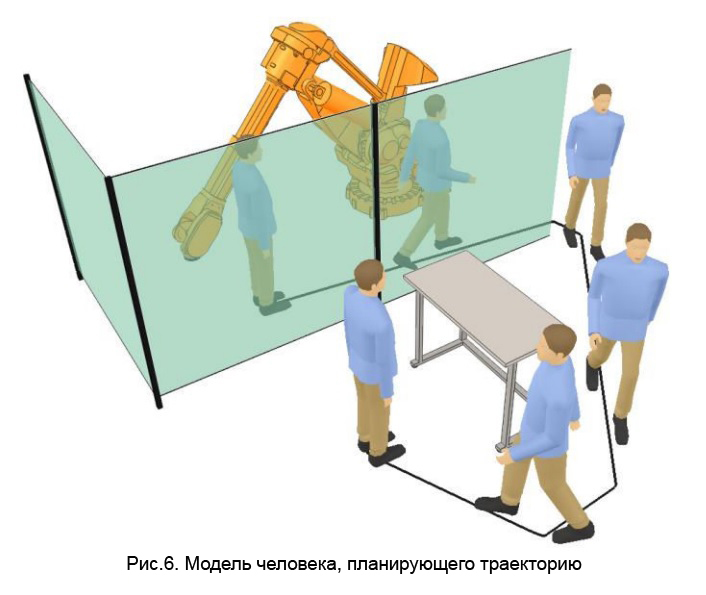 KesimpulanV-REP adalah lingkungan pemodelan yang fleksibel dan dapat diukur. Menawarkan banyak teknik pemrograman yang berbeda untuk pengontrol, serta kemampuan untuk mengintegrasikan pengontrol dan fungsi ke dalam model simulasi, itu membuat lebih mudah bagi programmer untuk melakukan dan mengurangi kerumitan penyebaran bagi pengguna.Sampai saat ini, V-REP telah berkembang menjadi robot dan pengontrol simulator yang kuat dan banyak digunakan secara luas digunakan dalam bidang ilmiah dan industri. Ini melakukan berbagai tugas: dari memeriksa sistem, mengoptimalkan algoritma, memodelkan rangkaian perakitan kompleks dalam otomasi industri, hingga menjadwalkan tugas untuk robot dan pengontrol.Penulis artikel: marc@coppeliarobotics.comEric Romer, Dosen, Universitas Negeri Campinas, BrasilSurya Singh, profesor di Universitas Queensland, AustraliaMark Frieze, CEO Coppelia Robotics, Swiss.Terjemahan: Ales Khanieva, kampus Robotnopark Navigator, Kazan.
KesimpulanV-REP adalah lingkungan pemodelan yang fleksibel dan dapat diukur. Menawarkan banyak teknik pemrograman yang berbeda untuk pengontrol, serta kemampuan untuk mengintegrasikan pengontrol dan fungsi ke dalam model simulasi, itu membuat lebih mudah bagi programmer untuk melakukan dan mengurangi kerumitan penyebaran bagi pengguna.Sampai saat ini, V-REP telah berkembang menjadi robot dan pengontrol simulator yang kuat dan banyak digunakan secara luas digunakan dalam bidang ilmiah dan industri. Ini melakukan berbagai tugas: dari memeriksa sistem, mengoptimalkan algoritma, memodelkan rangkaian perakitan kompleks dalam otomasi industri, hingga menjadwalkan tugas untuk robot dan pengontrol.Penulis artikel: marc@coppeliarobotics.comEric Romer, Dosen, Universitas Negeri Campinas, BrasilSurya Singh, profesor di Universitas Queensland, AustraliaMark Frieze, CEO Coppelia Robotics, Swiss.Terjemahan: Ales Khanieva, kampus Robotnopark Navigator, Kazan.Source: https://habr.com/ru/post/id385725/
All Articles