Gangguan dalam sistem satelit navigasi global. Lanjutan
Yang mengejutkan saya, artikel sebelumnya diterima dengan hangat. Hari ini kami terus mempertimbangkan masalah ini. Tindakan anti kemacetanDalam navigasi, tingkat kebisingan selalu melebihi tingkat sinyal. Untuk menentukan tingkat interferensi (rasio interferensi / sinyal, rasio J / S), dipertimbangkan seberapa banyak kebisingan yang melebihi tingkat kebisingan. Berikut ini adalah metode untuk meningkatkan kekebalan derau penerima, bersama dengan gangguan maksimum terhadap metode yang efektif.
Tindakan anti kemacetanDalam navigasi, tingkat kebisingan selalu melebihi tingkat sinyal. Untuk menentukan tingkat interferensi (rasio interferensi / sinyal, rasio J / S), dipertimbangkan seberapa banyak kebisingan yang melebihi tingkat kebisingan. Berikut ini adalah metode untuk meningkatkan kekebalan derau penerima, bersama dengan gangguan maksimum terhadap metode yang efektif. 1. Peningkatan bandwidth sinyal (hingga 10 dB);2. Peningkatan daya pemancar pada pesawat ruang angkasa (hingga 20 dB);3. Integrasi penerima navigasi (hingga 30 dB);4. Penggunaan filter perangkat keras digital (hingga 40 dB);5. Penggunaan koreksi frekuensi waktu (hingga 50 dB);6. Penggunaan metode antena (hingga 70 dB);Dua metode pertama bergantung pada sinyal yang digunakan oleh pesawat ruang angkasa dan tidak dapat diubah dari Bumi setelah peluncuran. Metode antena sangat menyulitkan dan meningkatkan biaya peralatan konsumen, yang secara drastis mengurangi kemungkinan jangkauan pengguna.
1. Peningkatan bandwidth sinyal (hingga 10 dB);2. Peningkatan daya pemancar pada pesawat ruang angkasa (hingga 20 dB);3. Integrasi penerima navigasi (hingga 30 dB);4. Penggunaan filter perangkat keras digital (hingga 40 dB);5. Penggunaan koreksi frekuensi waktu (hingga 50 dB);6. Penggunaan metode antena (hingga 70 dB);Dua metode pertama bergantung pada sinyal yang digunakan oleh pesawat ruang angkasa dan tidak dapat diubah dari Bumi setelah peluncuran. Metode antena sangat menyulitkan dan meningkatkan biaya peralatan konsumen, yang secara drastis mengurangi kemungkinan jangkauan pengguna. Integrasi penerima navigasi tidak secara signifikan meningkatkan kekebalan noise dari penerima navigasi. Hal ini disebabkan oleh fakta bahwa sistem navigasi inersia (JST) tidak terpengaruh oleh gangguan radio dan memiliki akurasi pengukuran yang tinggi dalam jangka pendek. Namun, kesalahan dalam menentukan parameter navigasi menumpuk dari waktu ke waktu dan membutuhkan koreksi dari GNSS. Diagram di atas menunjukkan di mana, menggunakan filter Kalman, penerima navigasi terintegrasi.Penggunaan koreksi frekuensi waktu (penindasan gangguan dalam domain frekuensi) adalah metode yang efektif, tetapi sangat sulit untuk diterapkan secara real time. Ini karena pelaksanaan metode ini harus dilakukan dengan menggunakan komputer mikro secara paralel dengan operasi loop pelacakan, diskriminator, menyelesaikan masalah navigasi dan kecepatan dan menyelesaikan ambiguitas ketika bekerja dalam mode RTK. Berdasarkan hal ini, untuk dapat menekan interferensi dalam domain frekuensi, perlu memiliki cadangan daya komputasi yang signifikan yang tidak akan terlibat jika tidak ada gangguan.Dua kategori dibedakan di antara filter digital:1. Filter rekursif (dengan respons impuls tak terbatas);2. Filter non-rekursif (dengan respon impuls terbatas).Apa yang harus dipilih?Pilihannya sangat tergantung pada perangkat keras yang tersedia. Optimal dalam hal kompleksitas implementasi dan biaya perangkat akhir adalah filter digital. Di penerima navigasi Anda dapat menemukan filter IIR dan FIR. Filter FIR memiliki keuntungan karena dapat membuat filter dengan respons fase linier dan, sebagai hasilnya, keterlambatan grup konstan. Ini berarti bahwa komponen frekuensi yang berbeda akan tertunda oleh jumlah siklus jam yang sama ketika melewati filter. Namun, dengan menggunakan filter IIR, jendela takik yang jauh lebih sempit dan pita transisi yang umumnya lebih kecil dapat dicapai dengan urutan filter yang sama.Bagaimana cara kerjanya?
Integrasi penerima navigasi tidak secara signifikan meningkatkan kekebalan noise dari penerima navigasi. Hal ini disebabkan oleh fakta bahwa sistem navigasi inersia (JST) tidak terpengaruh oleh gangguan radio dan memiliki akurasi pengukuran yang tinggi dalam jangka pendek. Namun, kesalahan dalam menentukan parameter navigasi menumpuk dari waktu ke waktu dan membutuhkan koreksi dari GNSS. Diagram di atas menunjukkan di mana, menggunakan filter Kalman, penerima navigasi terintegrasi.Penggunaan koreksi frekuensi waktu (penindasan gangguan dalam domain frekuensi) adalah metode yang efektif, tetapi sangat sulit untuk diterapkan secara real time. Ini karena pelaksanaan metode ini harus dilakukan dengan menggunakan komputer mikro secara paralel dengan operasi loop pelacakan, diskriminator, menyelesaikan masalah navigasi dan kecepatan dan menyelesaikan ambiguitas ketika bekerja dalam mode RTK. Berdasarkan hal ini, untuk dapat menekan interferensi dalam domain frekuensi, perlu memiliki cadangan daya komputasi yang signifikan yang tidak akan terlibat jika tidak ada gangguan.Dua kategori dibedakan di antara filter digital:1. Filter rekursif (dengan respons impuls tak terbatas);2. Filter non-rekursif (dengan respon impuls terbatas).Apa yang harus dipilih?Pilihannya sangat tergantung pada perangkat keras yang tersedia. Optimal dalam hal kompleksitas implementasi dan biaya perangkat akhir adalah filter digital. Di penerima navigasi Anda dapat menemukan filter IIR dan FIR. Filter FIR memiliki keuntungan karena dapat membuat filter dengan respons fase linier dan, sebagai hasilnya, keterlambatan grup konstan. Ini berarti bahwa komponen frekuensi yang berbeda akan tertunda oleh jumlah siklus jam yang sama ketika melewati filter. Namun, dengan menggunakan filter IIR, jendela takik yang jauh lebih sempit dan pita transisi yang umumnya lebih kecil dapat dicapai dengan urutan filter yang sama.Bagaimana cara kerjanya?. , , .

.. . , , . , , .
 Tugas saya adalah mengembangkan penekan dalam struktur yang ada dari penerima navigasi berdasarkan VLSI 1879VIA1Ya yang diproduksi oleh "Modul" Pusat Ilmiah dan Teknis. Jika kita berbicara secara singkat tentang platform perangkat keras dan perangkat lunak ini, maka kita dapat membedakan:1. 4 ADC 12-bit dengan frekuensi sampling 81,92 MHz;2. Inti dari ARM1176;3. 2 core NeuroMatrix DSP dengan pengali vektor-matriks yang mampu mensejajarkan operasi dengan nilai bit-bit yang rendah;4. Unit preprocessing sinyal perangkat keras (BPOS).
Tugas saya adalah mengembangkan penekan dalam struktur yang ada dari penerima navigasi berdasarkan VLSI 1879VIA1Ya yang diproduksi oleh "Modul" Pusat Ilmiah dan Teknis. Jika kita berbicara secara singkat tentang platform perangkat keras dan perangkat lunak ini, maka kita dapat membedakan:1. 4 ADC 12-bit dengan frekuensi sampling 81,92 MHz;2. Inti dari ARM1176;3. 2 core NeuroMatrix DSP dengan pengali vektor-matriks yang mampu mensejajarkan operasi dengan nilai bit-bit yang rendah;4. Unit preprocessing sinyal perangkat keras (BPOS).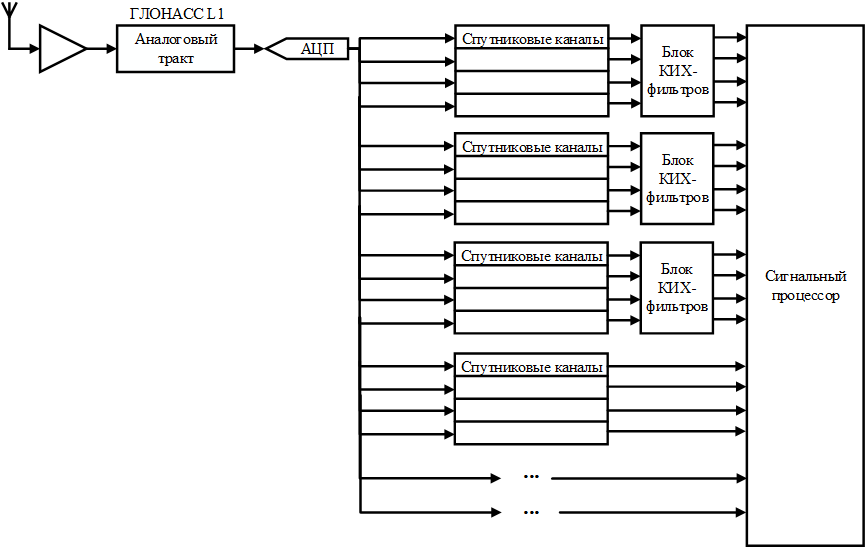 Rincian lainnya dapat ditemukan di situs, sekarang kami akan lebih memperhatikan BPOS. Sirkuit penerima umum diberikan di atas. Ini berisi antena, jalur analog (misalnya, GLONASS L1, tapi sekarang tidak masalah), ADC, saluran digital dan prosesor sinyal. BPOS berisi 24 saluran digital, 12 di antaranya memiliki akses ke tiga blok filter FIR. Setiap blok berisi 4 filter FIR urutan ke-64 dengan koefisien 8-bit. Di dalam satu unit, filter dapat diaktifkan secara seri atau paralel untuk diterapkan dari satu hingga empat penekan. Saluran digital berisi osilator lokal digital, filter low-pass, decimator (untuk menurunkan frekuensi pengambilan sampel), serta normalizer. Dalam prosesor sinyal (NeuroMatrix, bukan ARM), algoritma untuk mendeteksi gangguan, menghitung koefisien filter perangkat keras,pemrosesan korelasi dan pelacakan loop (FAP dan CVD).
Rincian lainnya dapat ditemukan di situs, sekarang kami akan lebih memperhatikan BPOS. Sirkuit penerima umum diberikan di atas. Ini berisi antena, jalur analog (misalnya, GLONASS L1, tapi sekarang tidak masalah), ADC, saluran digital dan prosesor sinyal. BPOS berisi 24 saluran digital, 12 di antaranya memiliki akses ke tiga blok filter FIR. Setiap blok berisi 4 filter FIR urutan ke-64 dengan koefisien 8-bit. Di dalam satu unit, filter dapat diaktifkan secara seri atau paralel untuk diterapkan dari satu hingga empat penekan. Saluran digital berisi osilator lokal digital, filter low-pass, decimator (untuk menurunkan frekuensi pengambilan sampel), serta normalizer. Dalam prosesor sinyal (NeuroMatrix, bukan ARM), algoritma untuk mendeteksi gangguan, menghitung koefisien filter perangkat keras,pemrosesan korelasi dan pelacakan loop (FAP dan CVD).128- 16- 67 , .
, , , .
. :

:

, .
Perlu juga dicatat bahwa filter memiliki fitur, yaitu keterlambatan grup penyisipan sama dengan setengah ukuran filter. Nilai ini diperhitungkan dalam solusi selanjutnya dari masalah navigasi dan, dengan demikian, mendapat kompensasi penuh. Source: https://habr.com/ru/post/id389203/
All Articles