Pikiran dengan keras. Dan saya pergi berjalan ... Atau mengapa robot berjalan diperlukan
Dalam robot bergerak berbasis darat, sistem pergerakan yang dilacak dan beroda secara tradisional digunakan, penggunaan sistem tersebut ditentukan oleh kemudahan implementasi dan kesinambungan dari kendaraan darat. Pada saat yang sama, ada banyak sistem pergerakan khusus, di antaranya para ilmuwan dan fiksi ilmiah secara khusus tertarik pada sistem berjalan dan robot bergerak yang didasarkan padanya.Kaki mekanik (pedipulator) memberikan pergerakan robot bergerak dan memberikan kemampuan untuk melangkahi rintangan, masing-masing, penggunaan robot berjalan disarankan ketika hambatan tidak dapat diatasi untuk robot yang dilacak dan beroda, benda tersebut bisa lebih tinggi dari ketinggian sasis robot atau daerah berawa, dan penggunaan sasis besar. dimensi tidak dapat diterima karena penggunaan robot di medan kasar atau di lingkungan perkotaan, serta konsumsi daya tinggi sasis.Berapa banyak kaki yang dibutuhkan robot?Jumlah kaki mempengaruhi stabilitas robot, masing-masing, penggunaan robot dengan jumlah kaki lebih dari satu pasangan (berjalan dengan banyak kaki atau bergerak dengan banyak kaki) disarankan di medan yang sulit. Penggunaan satu pasang kaki (berjalan dua kaki atau bipedalitas, penggerak bipedal) disarankan untuk gerakan di bagian dalam ruangan dan area perkotaan, seperti lingkungan seperti itu diadaptasi untuk seseorang dengan postur tegak dengan dua kaki.Untuk tujuan apa menggunakan robot berjalan? Jika kita beralih ke film sci-fi, misalnya, maka, robot berjalan paling sering digambarkan sebagai kendaraan militer dan mungkin ada pendapat yang salah bahwa teknik seperti itu adalah obat mujarab di medan perang, tetapi ini tidak begitu.Dalam film Wars bintang atau, misalnya, dalam film fiksi ilmiah Avatar, kendaraan tersebut digunakan dalam operasi militer di medan terbuka dan kasar, yang sepenuhnya membuka kedoknya karena profil tinggi mereka dan menjadikannya sasaran empuk artileri dan alat berat lainnya. senjata. Berbeda dengan contoh sebelumnya, bagian pertama dari film "Robocop" dan film "Robot bernama Chappi" menunjukkan robot berjalan yang beroperasi di lingkungan perkotaan, tetapi desain pedipulator mereka tidak memungkinkan mereka untuk melewati rintangan besar (untuk melangkah efektif, desain pedipulator harus serupa dengan struktur manusia). kaki), serta bermanuver di lingkungan kota, yang menjadikan mereka sasaran empuk, meski memiliki baju besi yang berat. Situasinya benar-benar mirip dengan penggunaan tank di kota. Gambar 1 - AT-AT walker dari film Star Wars
Gambar 1 - AT-AT walker dari film Star Wars Gambar 2 - exoskeleton AMP dari film Avatar
Gambar 2 - exoskeleton AMP dari film Avatar Gambar 3 - Robot ED-209 dari film Robocop
Gambar 3 - Robot ED-209 dari film Robocop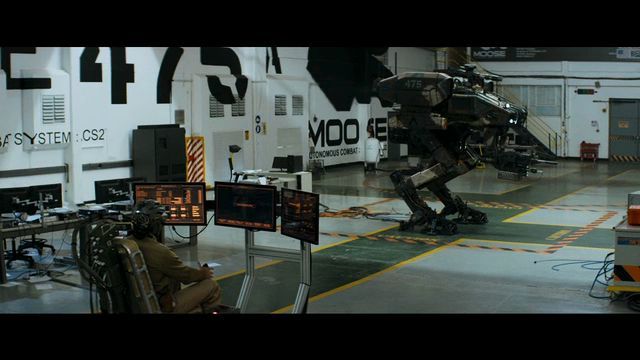 Gambar 4 - Robot MOOSE dari film "Robot bernama Chappy"Pertimbangkan di mana disarankan untuk menggunakan robot berjalan.Robot penggerak bipedal:
Gambar 4 - Robot MOOSE dari film "Robot bernama Chappy"Pertimbangkan di mana disarankan untuk menggunakan robot berjalan.Robot penggerak bipedal:- dalam bentuk android, di bidang layanan sosial, dalam robotika konsumen;
- dalam bentuk platform dengan peralatan target dan manipulator, dalam situasi darurat, misalnya, selama parsing, dalam konstruksi, dalam pemeliharaan objek teknis (peralatan, rakitan);
- dalam bentuk platform lapis baja dengan sistem senjata dan manipulator untuk mendukung tembakan dari operasi darat di lingkungan perkotaan, penghancuran hambatan teknik, barikade, sedangkan perkiraan ketinggian robot tidak boleh melebihi dua tinggi manusia rata-rata, mis. 350 cm (nilai ini diperoleh secara intuitif berdasarkan SNiP 2.09.04-87, di mana diindikasikan bahwa bangunan tempat tinggal harus memiliki ketinggian plafon minimal 250 cm, dan bangunan administrasi minimal 300 cm, tentu saja, kesimpulan ini tidak mengklaim tidak ambigu), untuk efektif tempat berlindung di medan perkotaan (mis. setidaknya di belakang bangunan satu lantai) dan cukup besar untuk menampung muatan.
Robot dengan penggerak multi-kaki:- dalam bentuk platform dengan kompartemen kargo, untuk ekspedisi di atas medan yang kasar, berawa dan bergunung, sedangkan desain platform dengan banyak artikulasi sesuai dengan prinsip struktur tubuh ulat diinginkan, untuk hambatan amplop yang lebih baik.
Kesimpulan Saat ini, sistem berjalan hanya digunakan dalam model eksperimental robotika dan platform penelitian, dan belum banyak digunakan, karena masalah keseimbangan dan suplai energi yang efisien dari drive pedipulator belum terselesaikan. Tetapi kepastian dalam penggunaan robot mobile seperti itu diperlukan sekarang untuk pengembangan konsep sampel signifikan yang praktis. Source: https://habr.com/ru/post/id390895/
All Articles