Pikiran dengan keras. Empat lebih baik dari satu ... Atau konsep quadrocopter
Artikel tersebut menyoroti kekurangan mendasar dari pesawat terbang seperti helikopter, dan solusinya diusulkan. Kemungkinan penerapan konsep ini dalam sistem dan kompleks robot dipertimbangkan. Pendekatan yang diuraikan tidak mengklaim tidak ambigu dan akurat, dan artikel ini bertujuan untuk berbagi ide teknis dengan pembaca GT.PERNYATAAN MASALAH
Aircraft (LA) adalah mesin atau perangkat untuk terbang di atmosfer atau luar angkasa. Pada saat ini, klasifikasi pesawat memiliki berbagai jenis dan jenis pesawat, di antaranya banyak yang dapat diidentifikasi salah satu jenis pesawat-helikopter yang paling banyak digunakan.Mari kita selidiki kekurangan utama helikopter sebagai sebuah kelas:- sulitnya memuat barang dan peralatan berdimensi besar karena kompartemen kargo yang sempit,
- pendaratan hanya dimungkinkan jika tidak ada roll samping karena badan pesawat sempit dan satu area tersapu oleh rotor.
Untuk menggambarkan kekurangan 3 dan 4, kami mempertimbangkan helikopter angkut Mi-26 (Gbr. 1). Gambar 1 - Helikopter Mi-26 dalam tiga proyeksi. Lebar kompartemen kargo dari helikopter adalah 320 cm, untuk perbandingan, lebar pengangkut personel lapis baja BTR-70 adalah 280 cm, masing-masing, ada ruang 20 cm antara masing-masing sisi konveyor dan dinding kompartemen kargo helikopter, yang merupakan faktor negatif. saat memuat peralatan dengan dimensi seperti itu (Gbr. 2, kanan). Gambar 2 (kiri) menggambarkan kompleksitas proses pemuatan menggunakan forklift.Kehadiran faktor ini menimbulkan ketidaknyamanan saat menggunakan helikopter dalam transportasi kargo sipil dan sangat penting ketika menggunakan pesawat tersebut dalam keadaan darurat dan operasi militer.
Gambar 1 - Helikopter Mi-26 dalam tiga proyeksi. Lebar kompartemen kargo dari helikopter adalah 320 cm, untuk perbandingan, lebar pengangkut personel lapis baja BTR-70 adalah 280 cm, masing-masing, ada ruang 20 cm antara masing-masing sisi konveyor dan dinding kompartemen kargo helikopter, yang merupakan faktor negatif. saat memuat peralatan dengan dimensi seperti itu (Gbr. 2, kanan). Gambar 2 (kiri) menggambarkan kompleksitas proses pemuatan menggunakan forklift.Kehadiran faktor ini menimbulkan ketidaknyamanan saat menggunakan helikopter dalam transportasi kargo sipil dan sangat penting ketika menggunakan pesawat tersebut dalam keadaan darurat dan operasi militer.
 Gambar 2 - Proses memuat dengan forklift (kiri), memuat BTR-70 (kanan)
Gambar 2 - Proses memuat dengan forklift (kiri), memuat BTR-70 (kanan)MEMECAHKAN MASALAH
Quadcopter adalah pesawat terbang dengan empat rotor yang berputar secara diagonal dengan arah yang berlawanan. Tata letak rotor yang demikian memungkinkan Anda untuk merealisasikan pesawat dengan badan pesawat yang lebih lebar daripada helikopter (Gbr. 3), dan kehadiran empat rotor akan menyediakan empat zona sapuan, yang akan memungkinkan pendaratan dan lepas landas dengan roll samping.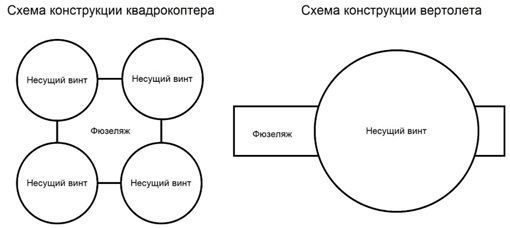 Gambar 3 - Blok diagram dari desain quadrocopter dan helikopterSaat menggunakan skema ini, unit seperti sistem bahan bakar, sistem kontrol, sistem radar, listrik terletak di bagian atas badan pesawat dalam kapsul lapis baja khusus (Gbr. 4). Susunan simpul ini memungkinkan Anda menempatkan palka kompartemen kargo dan ramp kargo di salah satu dari 5 sisi badan pesawat (Gbr. 5): dari empat sisi dan dari bawah (palka pemuatan vertikal).
Gambar 3 - Blok diagram dari desain quadrocopter dan helikopterSaat menggunakan skema ini, unit seperti sistem bahan bakar, sistem kontrol, sistem radar, listrik terletak di bagian atas badan pesawat dalam kapsul lapis baja khusus (Gbr. 4). Susunan simpul ini memungkinkan Anda menempatkan palka kompartemen kargo dan ramp kargo di salah satu dari 5 sisi badan pesawat (Gbr. 5): dari empat sisi dan dari bawah (palka pemuatan vertikal).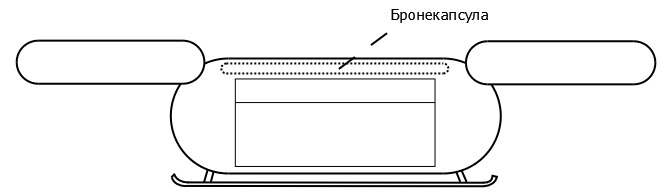 Gambar 4 - Lokasi kapsul lapis baja
Gambar 4 - Lokasi kapsul lapis baja Gambar 5 - Penempatan palka kargo
Gambar 5 - Penempatan palka kargoPENGUNGKAPAN KEPUTUSAN
Pendekatan yang dipertimbangkan memiliki kelemahan-kelemahan berikut:- kerentanan mesin rotor,
- volume tangki bahan bakar kecil karena penempatan di bagian atas badan pesawat.
Kemungkinan solusi:- penempatan rotor di nacelles khusus dan pelat lapis baja yang menutupi engine (Gbr. 7)
- penempatan tangki bahan bakar di bagian luar badan pesawat.
 Gambar 7 - Penempatan rotor
Gambar 7 - Penempatan rotorAPLIKASI KONSEP DALAM
SISTEM ROBOTIK DAN KOMPLEKS
Kendaraan udara tak berawak (UAV) - pesawat tanpa awak di atas kapal, diimplementasikan menggunakan robot. Penerapan quadrocopter kargo, sebagai UAV, disarankan:- dalam kompleks robot, misalnya, sebagai bagian dari sistem transportasi dan logistik robot (proses penyimpanan dan pengangkutan barang yang sepenuhnya otomatis);
- sebagai sistem independen, untuk digunakan dalam kondisi meningkatnya bahaya bagi kehidupan pilot (darurat, operasi militer);
- sebagai sistem independen untuk menyelesaikan tugas-tugas yang membutuhkan sejumlah besar pesawat terbang dan tingkat efisiensi yang tinggi (operasi militer, transportasi kargo, perawatan medis darurat).
Berdasarkan aplikasi UAV kargo di atas, kami mempertimbangkan kemungkinan implementasi sistem kontrol pesawat menggunakan pendekatan klasik.Manajemen terpusat dengan operator manusia (komunikasi satu-ke-satu). Struktur sistem manajemen:- operator manusia
- terminal jarak jauh
- Pesawat dengan sistem pemrosesan informasi cerdas onboard.
Seluruh proses kontrol pesawat dilaksanakan oleh operator melalui terminal, sistem pemrosesan informasi on-board menganalisis informasi dari sensor dan memberikan peringatan kepada operator ketika parameter menyimpang dari norma, memprediksi kemungkinan situasi darurat, mis. Ini adalah sistem pakar yang dinamis.Manajemen terpusat dengan ruang kontrol (komunikasi satu-ke-banyak). Struktur sistem manajemen:- operator manusia
- terminal jarak jauh
- satu atau sekelompok pesawat dengan sistem kontrol cerdas onboard.
Operator manusia melalui terminal mengimplementasikan perencanaan rute, menetapkan tujuan, memantau kebenaran tugas, keadaan pesawat, mis. melakukan fungsi dispatcher. Sistem kontrol di pesawat mengontrol pesawat dalam mode otomatis. Dengan pendekatan ini, banyak pesawat dapat dikendalikan oleh operator.Manajemen terdesentralisasi (hubungan banyak ke banyak). Struktur sistem manajemen:- sumber permintaan (orang, sistem teknis),
- Grup LA dengan sistem kontrol cerdas terintegrasi.
Sumber permintaan menghasilkan permintaan layanan. Grup pesawat memproses data aplikasi dan melakukan layanan berdasarkan prioritas aplikasi dan lokasi relatif pesawat serta sumber permintaan. Dalam pendekatan ini, prinsip-prinsip kontrol kelompok robot digunakan: interogasi (dengan definisi node utama atau stasiun pangkalan), jaringan cincin dengan akses token, atau kasus khusus dari jaringan cincin - jaringan bus. Source: https://habr.com/ru/post/id391105/
All Articles