Robot kayu yang bisa bermain catur
Anda mungkin telah melihat banyak proyek berbasis Arduino yang dikelola melalui beberapa jenis smartphone. Proyek-proyek seperti itu, seperti biasanya, adalah seperti ini: mesin dengan modul Bluetooth dimasukkan ke dalamnya, yang perintahnya dikirim dari emulator joystick di telepon (atau sesuatu seperti itu). Banyak sekali alat seperti itu dibuat, dan gagasan seperti itu muncul di benak saya. Tetapi bagaimana jika Arduino membantu Anda untuk berpisah dengan ponsel cerdas Anda untuk sementara waktu, tetapi pada saat yang sama terus memainkannya? Maka proyek robot catur lahir, yang "otak" dan "matanya" terkonsentrasi di smartphone Android. Lebih detail - di bawah potongan.Tampilan umum
[Pekerjakan]Seluruh komposisi ini adalah sebuah kotak kayu yang di atasnya terdapat papan catur, manipulator, dan braket dengan lampu latar tempat ponsel diletakkan. Setelah permainan, semua hal di atas dihapus dalam kotak ini dan dapat diangkut ke mana saja tanpa masalah, misalnya, dalam ransel.Prinsip operasi adalah sebagai berikut. Di atas papan, pada braket khusus, telepon dipasang dengan aplikasi khusus yang, dengan menggunakan sistem visi komputer, memperbaiki posisi saat ini dari potongan-potongan di papan. Berdasarkan fakta bahwa sistem memonitor semua gerakan, tidak perlu secara visual menentukan sosok mana yang ada di dalam sel, cukup untuk mengetahui fakta keberadaan dan warnanya.Setelah langkah yang dilakukan oleh seseorang diperbaiki, informasi ini dikirimkanmesin catur yang memutuskan gerakan mana yang perlu dia tanggapi.Selanjutnya, sudut dihitung untuk posisi yang harus diambil robot untuk bergerak. Kemudian informasi ini dikirim melalui Bluetooth ke manipulator. Manipulator hanya dapat menerimainformasi ini dan bergerak.Saya harap pembaca artikel ini akan menemukan sesuatu yang menarik untuk dirinya di sini. Mungkin seseorang ingin mengulang proyek ini, atau melakukan hal serupa. Saya ingin mengatakan segera bahwa tidak akan ada tutorial, karena menyalin pekerjaan ini hanya sesuai dengan instruksi tidak akan bekerja langkah demi langkah, karena ada banyak seluk-beluk yang dapat dipahami hanya ketika mencoba untuk mengimplementasikannya. Jika Anda ingin melihat gambar-gambar manipulator, atau jika Anda memiliki pertanyaan lain, tulis dalam pesan pribadi di GT atau VK , saya akan menjawab secara gratis dan atas permintaan.Bagian perangkat lunak
Semua komposisi ini dikendalikan oleh satu aplikasi Android kecil. Dia memiliki banyak tugas: Menentukan angka-angka di papan tulis, menghitung sudut untuk manipulator, bekerja dengan mesin catur, beberapa pesan suara dari robot seperti "Aku menetapkanmu cek!" dan "Terima kasih untuk permainannya!" Tetapi dengan semua ini, antarmuka aplikasi cocok dalam satu layar.Sistem visi cukup sederhana. Dari sudut pandang ponsel tidak ada banyak perbedaan antara, katakanlah, seorang raja dan seekor kuda - secara visual kedua tokoh ini akan terlihat seperti lingkaran hitam dan putih. Oleh karena itu, sistem tidak berkenalan dengan posisi yang dilihatnya setiap waktu lagi, tetapi mengingat urutan semua gerakan yang dilakukan. Dan langkah yang dibuat sangat mudah untuk ditentukan: jika suatu saat program melihat bahwa suatu bagian telah menghilang di satu sel dan muncul di sel lain, maka ini akan dianggap sebagai langkah. Begitulah cara kerjanya.Visi teknis semacam ini diterapkan secara eksklusif melalui API Android, tanpa menggunakan OpenCV atau yang serupa. Ini tidak benar, alasan di sini adalah minat pribadi untuk mewujudkan semuanya dari awal.Manipulator
Butuh banyak pencarian kreatif untuk menghasilkan desain manipulator yang dapat melakukan pekerjaannya dengan drive servo murah TowerPro sg-90 Cina murah yang saya miliki dalam jumlah besar, yang tidak berkualitas tinggi. Oleh karena itu, kedua lengan manipulator dibuat dalam bentuk jajaran genjang, ini memungkinkan sistem penangkap bentuk untuk selalu tetap dalam posisi vertikal. Ini, pada gilirannya, membuatnya tidak perlu menambahkan servo lain, oleh karena itu, sistem akan memiliki lebih sedikit kesalahan, memungkinkannya menjadi ringan dan lebih atau kurangdapat diandalkan. Karena roda gigi juga terbuat dari kayu, sulit untuk mencapai kualitas tertinggi dari pekerjaan mereka, oleh karena itu, untuk mengimbangi serangan balik, manipulator membuat gerakan samping sebelum setiap gerakan untuk mendekati setiap titik di satu sisi.Adapun catu daya, robotnya menerimanya dari dua motherboard dari biaya biasa untuk telepon, yang aman terletak di dalam case. Satu muatan daya controller itu sendiri bersama dengan modul Bluetooth, yang lain langsung ke mekanik. Untuk membuat pencahayaan, bohlam LED dibongkar. Ternyata, ada dua papan di dalamnya: LED terletak di satu, dan konverter daya di yang lain. Satu terpasang ke braket, yang lain ditempatkan di badan kotak. Semua daya ditampilkan pada soket kecil di sisi badan kotak:Gambar lain menunjukkan area kerja manipulator untuk titik merah yang ditandai di atasnya. Untuk sumbu nol, kisaran sudutnya adalah 180 °.Saya tidak berhasil membuat robot seperti itu segera, beberapa prototipe bekerja sangat buruk, dan beberapa bekerja untuk pekerjaan lain. Misalnya, robot dalam video di bawah ini memasukkan gula ke dalam cangkir dan mengaduk burung camar.Sistem Pengambilan Bentuk
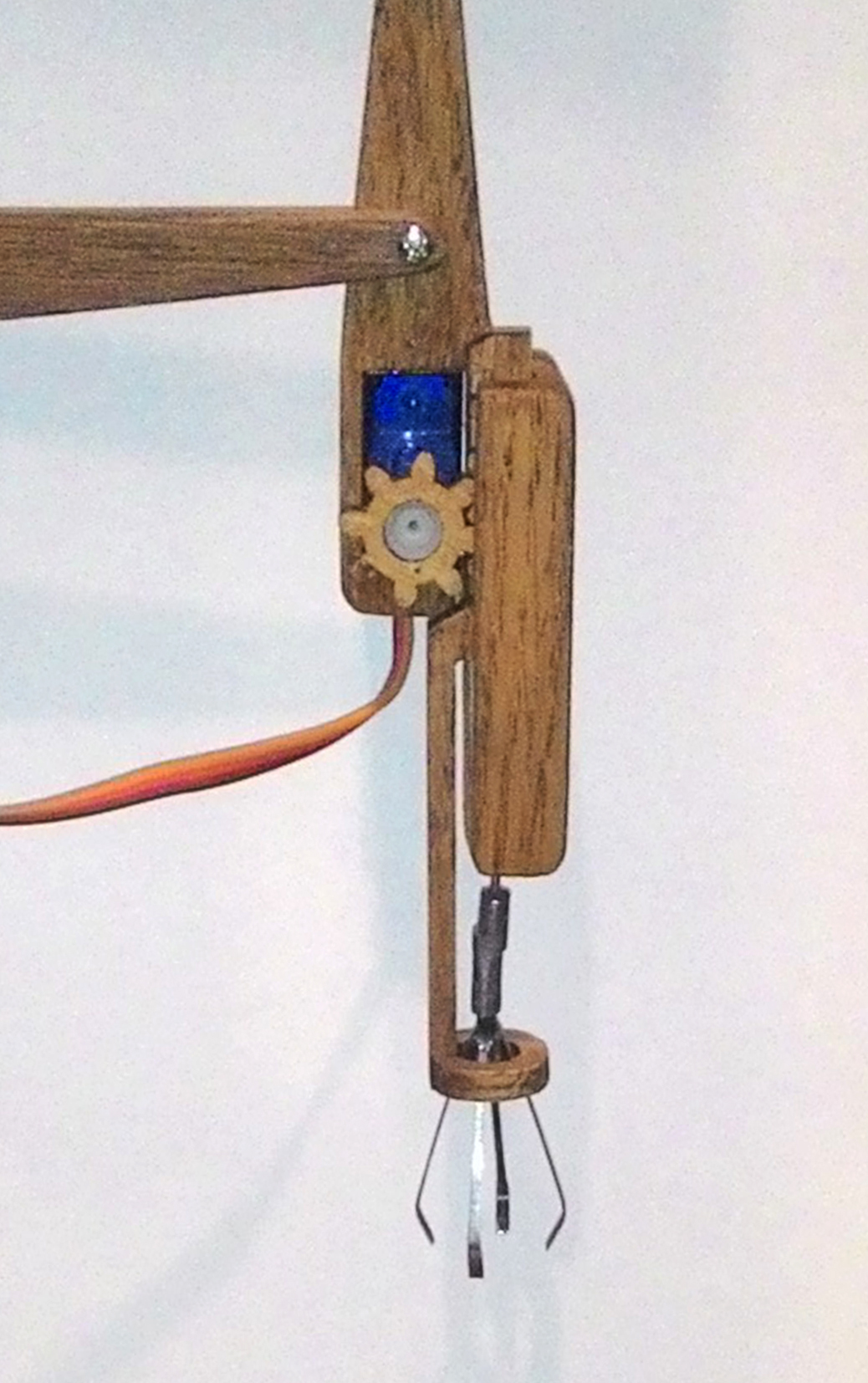
Yang menarik, menurut pendapat saya, adalah desain sistem penangkapan gambar. Solusi paling jelas di sini adalah membuat dua pipi bergerak ke arah satu sama lain di bawah kendali servo drive. Sesuatu seperti ini:Seperti yang dapat Anda lihat dari gambar, untuk satu set potongan yang benar-benar kecil dengan diameter dasar 18 mm, Anda perlu membuat kandang kotak-kotak hampir dua kali lebih besar, dan ukuran papan juga ternyata sangat besar. Setelah beberapa implementasi opsi ini gagal, saya menemukan hal yang tidak biasa, yang disebut “grip collet fleksibel”), dan sepertinya ini:Artinya, itu adalah inti berongga fleksibel di dalam dengan cakar logam kecil pegas di ujungnya, yang menutup jika terjepit di sisi. Dan tanpa adanya tekanan, cakar langsung terbuka. Setelah mematahkan tangkapan seperti itu, atas dasar itu saya membuat sistem saya untuk menangkap angka. Cakar logam menekan cincin, yang melekat pada rak gigi, digerakkan oleh servo.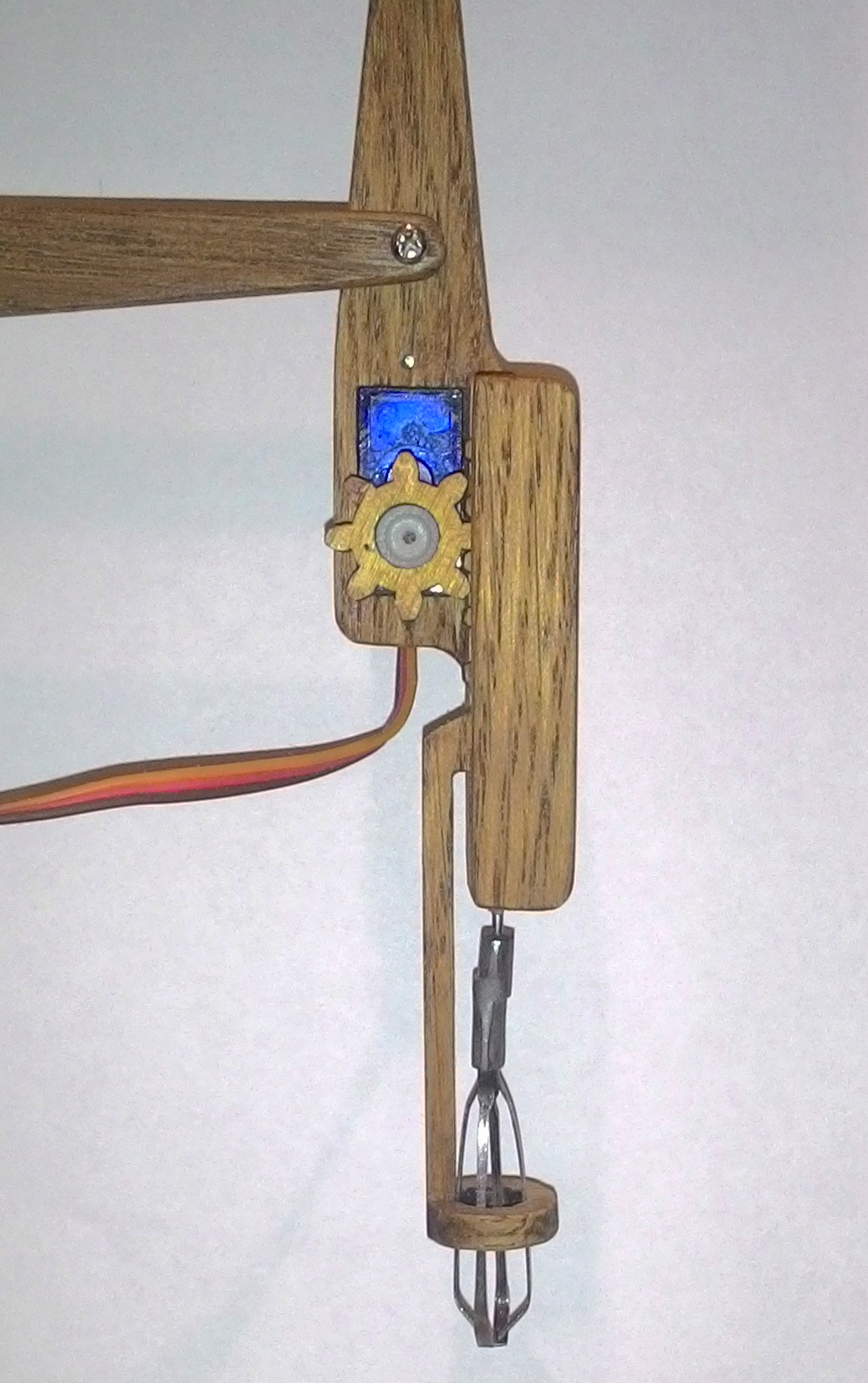
Hasil
Pekerjaan pada proyek berlanjut dan hasilnya juga secara bertahap membaik. Saat ini, robot dapat memainkan permainan yang tidak dibatasi oleh jumlah gerakan, baik untuk hitam maupun putih. Dalam hal ini, tidak akan ada kesalahan dalam pekerjaan mekanik atau di bagian perangkat lunak sistem. Ngomong-ngomong, dia tidak bermain sangat kuat, di level kategori ketiga, ini mudah diperbaiki dengan mengganti mesin catur. Saya mendemonstrasikan robot ini di pameran "Archimedes-2016", di mana ia bermain dengan orang-orang yang berbeda hampir tanpa henti selama 6 jam berturut-turut dan melewati test drive yang memadai.Itu saja, saya harap Anda tertarik pada proyek ini. Tentu saja, ini memiliki kelemahan dari fitur implementasi, sehingga masih ada ruang untuk perbaikan, peningkatan dan pengembangan. Saya akan dengan senang hati menerima saran, pertanyaan, dan saran di komentar. Source: https://habr.com/ru/post/id392065/
All Articles