Solusi terintegrasi untuk menangkap dan menahan tahap pengembalian pesawat ruang angkasa
Publikasi ini ditujukan untuk mereka yang, mengamati kemajuan SpaceX di bidang pengembalian tahap atas, memutuskan untuk mengikuti, bergerak ke arah yang sama, tetapi belum berhasil berinvestasi dalam 2 ton pendaratan.Kemampuan untuk menggunakan kembali tahap pendorong pesawat ruang angkasa dapat secara signifikan mengurangi biaya peluncuran mereka. Pada saat yang sama, diinginkan untuk meminimalkan biaya dan perubahan terkait dalam desain mereka, karena fungsi utama panggung masih merupakan output dari muatan ke luar angkasa. Solusi yang diusulkan adalah hasil pencarian ke arah yang ditunjukkan.Kompleks adalah situs pendaratan (2), berdasarkan pada tanah atau pada tongkang, dengan dimensi yang cukup untuk penerimaan terjamin, dengan mempertimbangkan kesalahan akurasi pendaratan langkah-langkah yang dikembalikan. Situs pendaratan dirancang untuk menahan berat tahap pengembalian (1) dan pada dasarnya memiliki struktur seluler (2) yang melewati gas reaktif melalui dirinya sendiri. Langsung di bawah landasan pendaratan ada sistem untuk melenyapkan dan memadamkan gas reaktif saat mengerem panggung, dalam kasus paling sederhana itu bisa berupa genangan air. Sepanjang perimeter ada empat penyangga bertingkat tinggi (3). Pada ketinggian yang diperlukan dan pada level yang sama, memegang sling (4) keluar dari setiap penopang, membentuk empat loop yang membentuk satu level dari loop gripping (6). Saat menggunakan loop tangkapan multi-level (5),menjadi mungkin untuk mempertahankan penuh tahap (1) dalam jaringan multi-level yang dibentuk. Dalam hal ini, kebutuhan untuk landasan (2) menghilang sepenuhnya.Secara umum, desain terlihat dan berfungsi sebagai berikut: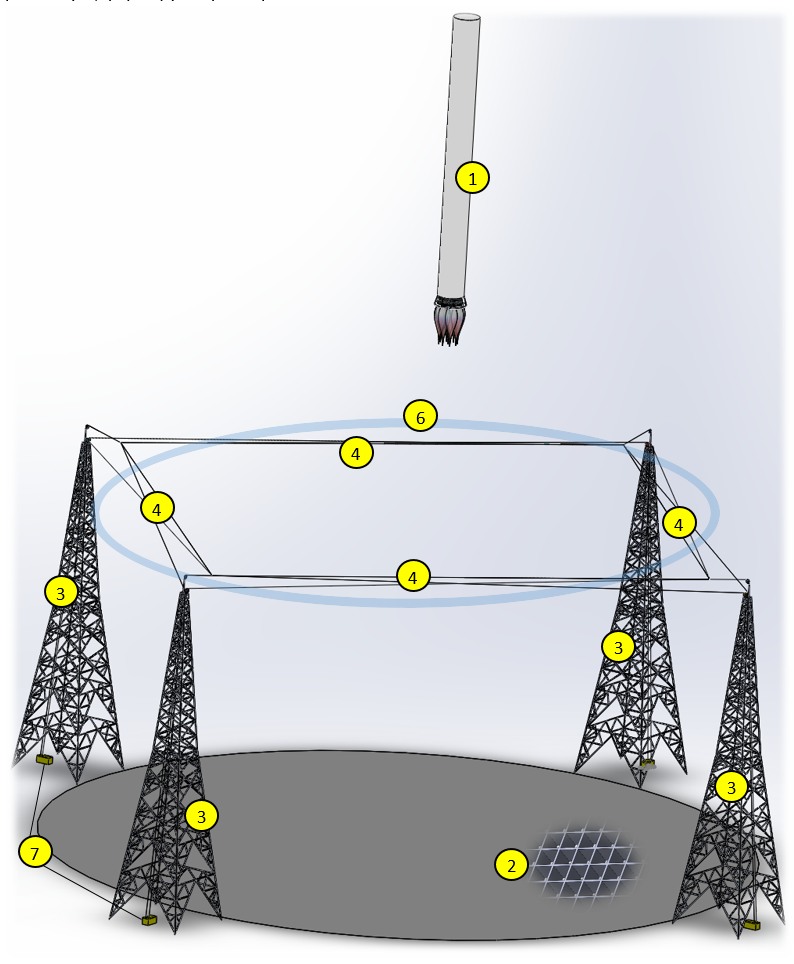 Pada saat awal, di lokasi, siap menerima panggung, loop tangkap (6) terbuka lebar secara maksimal, membentuk perimeter area tangkap.Dari saat titik pendaratan panggung menjadi cukup akurat diketahui, tahap kedua dimulai: posisi dan pembentukan loop mencengkeram (6) di sekitar tahap turun (1).
Pada saat awal, di lokasi, siap menerima panggung, loop tangkap (6) terbuka lebar secara maksimal, membentuk perimeter area tangkap.Dari saat titik pendaratan panggung menjadi cukup akurat diketahui, tahap kedua dimulai: posisi dan pembentukan loop mencengkeram (6) di sekitar tahap turun (1). Sistem otomatis, yang melacak posisi loop (6) di sekitar langkah (1), dengan bantuan winch (7), dengan cepat mempersempit loop grip (6) tanpa menyentuh permukaan langkah hingga sepenuhnya ditanam. Tetapi, jika perlu, loop (6) dapat secara aktif terlibat selama pendaratan untuk menstabilkan posisi panggung, membatasi kemungkinan penyimpangan.Pada saat kontak yang stabil dengan langkah (1) pad pendaratan, loop (6) dikencangkan. Ini memastikan fiksasi langkah (1) yang andal dalam posisi tegak. Lokasi loop di bagian paling atas memungkinkan langkah-langkah ringan untuk menahan langkah-langkah dalam posisi tegak.
Sistem otomatis, yang melacak posisi loop (6) di sekitar langkah (1), dengan bantuan winch (7), dengan cepat mempersempit loop grip (6) tanpa menyentuh permukaan langkah hingga sepenuhnya ditanam. Tetapi, jika perlu, loop (6) dapat secara aktif terlibat selama pendaratan untuk menstabilkan posisi panggung, membatasi kemungkinan penyimpangan.Pada saat kontak yang stabil dengan langkah (1) pad pendaratan, loop (6) dikencangkan. Ini memastikan fiksasi langkah (1) yang andal dalam posisi tegak. Lokasi loop di bagian paling atas memungkinkan langkah-langkah ringan untuk menahan langkah-langkah dalam posisi tegak. Di atas dianggap opsi pendaratan di platform. Dalam hal ini, loop hanya mampu mendukung langkah (1) dalam posisi tegak, tetapi, dengan peningkatan jumlah level dalam loop, itu menjadi mungkin untuk sepenuhnya menangkap dan menahan langkah kembali berat dalam jaringan yang dibentuk oleh loop.
Di atas dianggap opsi pendaratan di platform. Dalam hal ini, loop hanya mampu mendukung langkah (1) dalam posisi tegak, tetapi, dengan peningkatan jumlah level dalam loop, itu menjadi mungkin untuk sepenuhnya menangkap dan menahan langkah kembali berat dalam jaringan yang dibentuk oleh loop. Sebuah contoh dari tiga-tingkat tangkapan loop dalam versi berbasis kelautan, di tongkang (8). Retensi penuh dari langkah (1) dalam loop memungkinkan Anda untuk meninggalkan desain situs pendaratan.
Sebuah contoh dari tiga-tingkat tangkapan loop dalam versi berbasis kelautan, di tongkang (8). Retensi penuh dari langkah (1) dalam loop memungkinkan Anda untuk meninggalkan desain situs pendaratan. Keuntungan utama dari solusi ini.
Keuntungan utama dari solusi ini.- , , . , .
- .
- , , .
- : , — , , ; .
, . , .
. , «» , .
, , . . , ( ) - “ ” (“Ground effect”) ( ) , . , .
“ ” , .
, , , , , .
, . , .
“ ” , .
— , , . , , , , . , , , “Ground effect”.
. Unirail.org — , , .
:.
Falcon 9 ( )

, , , , , , , .
Source: https://habr.com/ru/post/id392071/
All Articles